无人机机载测量系统校准设备设计
2019-10-23陆文骏
陆文骏
(安徽三联学院 电子电气工程学院,安徽 合肥 230601)
无人机的试验、定型、平时训练及战前准备,都需要对无人机进行校准检测。现有的无人机系统,配备的检测设备少,没有校准设备,导致无人机装备主要性能参数的量值溯源链出厂后就终止了。基层单位也只能依靠少量的检测设备和经验定性对装备做功能好坏的检查,难以全面、系统、准确地把握无人机系统的技术状态。因此必须对无人机装备进行科学有效的校准与检测,实现无人机装备主要参数的量值溯源与传递,确保装备量值的准确与统一。
随着高科技设备的不断部署,设备技术支持的重要性逐渐得到认可。目前,国内已有科研院所针对近程无人机系统开展了测试与计量研究工作。但在需求论证、单项重要指标测试研究方面较深入,也有单项测试仪器和自动检测设备的成果应用,但这些仪器和设备总体上功能单一,系统测试主要采用通用标准仪器,对装备运行动态参数检测能力弱,很难进行动态参数测试和性能的科学客观评价。如针对某型无人机航空电子装配研制的自动检测设备,主要是对近程无人机的飞控仪、压力传感器、伺服舵机等航空电子单元设备进行检测,只用于车间系统的装配调试过程[1]。再如对角速率陀螺的静态检测,通过从地面站的飞行数据窗口检查角速率陀螺输出值,正常情况下该值应在0±3°/s范围附近。而角速率陀螺动态检测则是取下角速率陀螺旋转,角速率值应有变化则认为角速率陀螺工作正常。旋转角速率陀螺相当于对其施加高转速的冲击转角信号,用这种方法即使存在灵敏度和线性度差的问题角速率陀螺输出也会有相应变化,因而并不能测试出角速率陀螺的技术指标。
1 机载测量系统的校准方案设计
对机载测量系统的校准主要是用比对校准的原理,即由系统提供高准确度的标准激励源,被测对象和标准测量设备同时测量该激励源,对获得的结果进行比对,计算出机载测量系统的校准误差。需要该系统提供的标准激励源有空间角、角速率、差压、静压、恒温场[2];系统提供的标准测量设备有无人机飞行姿态校准台、压力校验仪、温度计。
1.1 校准对象
该系统的校准目标是气缸温度传感器、静压传感器、动态压力传感器、垂直陀螺仪和角速率陀螺仪。校准的参数有温度、压力、空间姿态角。校准对象的测量范围和允许的误差限制如表1所示。考虑实际工作情况,校准对象增加了角速率传感器,未包括原来技术方案中磁航向传感器的校准。
由于被校准对象一般不宜拆卸、搬运、离开现场,本校准设备需根据用户的使用场合是在机库还是在野外,是系统校准还是单独校准,是基层级还是基地级,对该校准系统要采取不同的连接方式和操作流程。此外,本校准设备应便于运输,具有自校、测试参数实时显示、现场工作环境自动采集、测量结果实时打印、归档功能和一定的抗振、抗电磁干扰能力。校准设备是基于模块化、集成化的设计思想,力求测试手段简单、测试设备小型、测试结果精确,以极高的效费比,准确快捷地实现无人机系统的技术保障,提高无人机装备技术准备效率,减少人员配备。
表1被校对象测量范围及允许误差极限
Table1Measurement Range and Permissible Error Limit of the Calibrated Object
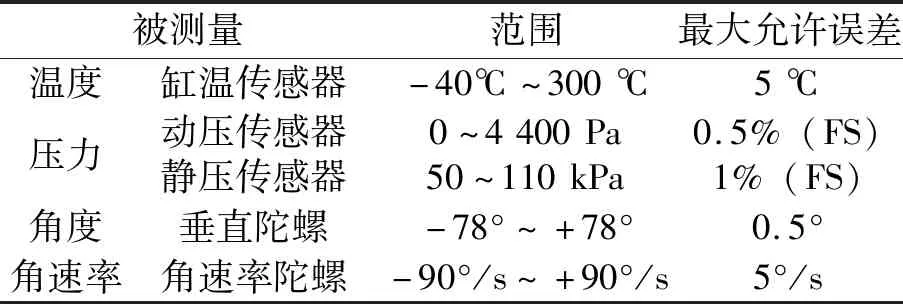
被测量范围最大允许误差温度缸温传感器-40℃~300℃5℃压力动压传感器静压传感器0~4400Pa50~110kPa0.5%(FS)1%(FS)角度垂直陀螺-78°~+78°0.5°角速率角速率陀螺-90°/s~+90°/s5°/s
1.2 校准方式
校准的方式有两种:系统联机校准和独立校准。
1.2.1 系统联机校准
由于部分传感器不宜拆卸,且经独立校准后的可能会在再次装机后的各个环节中引入误差。因此,当传感器再装机后,为确保传感器的技术性能满足系统需要,需对传感器进行联机校准。联机校准的基本方法是:
标准装置与被校机载传感器受同一激励源作用,被校机载传感器感应的电信号由机载计算机采集,解算成对应的物理量后,通过串行接口送入现场校准系统的主控系统;主控系统将标准装置送出的数据经过处理,转换成对应的物理量值与机载计算机解算出的物理量进行比对,得出校准数据和标准数据。系统联机校准过程见图1。
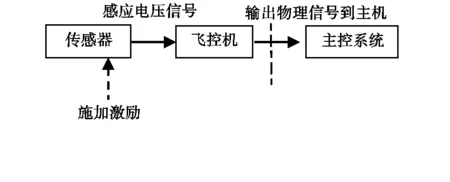
图1 机载测量系统联机校准框图Fig.1 On-line calibration block diagram of airborne measurement system
1.2.2 独立校准
独立校准是指单独对传感器(包括一次元件感应头和信号调理电路)相关参数的校准。 一般用于故障分析、设备维修后的检测以及装机联调前的单独检测。机载测量系统的校准过程如图2所示。各种被校机载传感器在激励源的作用下,感应出和激励源成线性关系的直流电压信号,该信号被发送到主控制系统,系统根据相应传感器的性能指标获得校准结果。

图2 机载测量系统独立校准Fig.2 Independent calibration of airborne measurement system
1.3 机载传感器的校准
1.3.1 缸温传感器的校准
无人机采用薄膜铂电阻做感温元件,配上相应的信号调理电路来完成气缸头温度的测量。感温元件的非线性调理电路部分已进行补偿,使其输出电压信号与被测温度在工作范围内成线性关系。感温元件允许的误差为±(0.3+0.05|t|) ℃。
温度校准时采用便携式干井式温度校准炉提供35~350 ℃的温度环境(飞机正常工作时的温度在50~250 ℃),将铂电阻温度计和校准的汽缸温度传感器放在炉子的相同深度,并测量铂电阻温度计的电阻值,通过插值将其转换为相应的标准温度值。
进行传感器系统校准时,被校缸温传感器感应的电压信号由机载计算机采集,并解算成对应的温度值后,通过串行接口送入主控系统。主控系统将铂电阻温度计测得的标准温度量值与机载计算机解算出的缸温值进行比对,得出校准结果。
进行传感器独立校准时,主控系统采集缸温传感器的输出电压(对应温度数据),将此电压信号转换成温度值,通过比较对应于测量的铂电阻温度计的标准温度值给出校准结果。
1.3.2 垂直陀螺的校准
无人机利用垂直陀螺中三自由度陀螺体的进动性、稳定性及摆式液体开关的地垂向心性,俯仰值与俯仰和倾斜电位计的飞行器姿态角线性相关。 将垂直陀螺仪放在UAV飞行姿态校准表上,并使用校准表作为激励源。在主控系统的作用下,驱动转台,使校准台旋转一定的角度,通过主控系统内的多功能采集卡采集垂直陀螺的输出电压值(独立校准方式), 经过相应处理变换成角度量;或者通过机载计算机的串行接口读取陀螺仪感应的角度值(系统校准方法),将其与标准值进行比较,并给出校准结果。
1.3.3 角速率陀螺的校准
无人机的角速率陀螺是在盒体内沿3个轴向安装角速率陀螺,分别感应飞机在横滚、航向、俯仰3个方向的角速率并将其变换成电压信号送给机载计算机,速率陀螺应用单片微机械加工的石英振动音叉作为敏感元件,直接利用压电石英材料作为驱动元件。角速率陀螺的校准方式同垂直陀螺,用夹具将其安装于转台之中,可通过驱动转台,以定角测时或定时测角的方式进行校准。
当进行传感器单独校准时,主控系统在转台的转动中对被校准角速率陀螺输出的电压数据进行多次采集并进行滤波处理,与转台的标准转速进行比对,给出校准结果。
当进行传感器系统校准时,为便于比较,主控系统将机载计算机输出角速率值与校准台的标准转速进行比对,给出校准结果。
1.3.4 静压传感器和动态压力传感器的校准
无人机上气压高度、空速的测量是采用静、动压传感器来测量飞机飞行中的大气静压(PH)和全压(Pt),由PH可求得气压高度,由Pt与PH之差得到差压PD(即动压),由PD可求得飞行速度,其解算公式如下:
根据空气动力学原理,当飞机飞行高度<11 000 m,飞行马赫数≤1时,按照标准大气状态下,气压高度和指示空速的解算由下式完成:
(1)
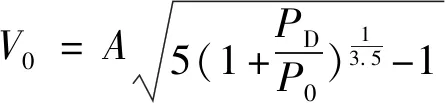
(2)
式中T0、τ、R、A0、P0为气体常数(数值略)。
PPT压力传感器用于无人机高度和空速测量。这两种传感器都是压力传感器,可通过压力校准器中的压力泵产生所需的气压标准。同时,输入校准的压力传感器,压力校准器读取标准压力值。 当进行传感器单独校准时,主控系统对被校准压力传感器输出的电压数据进行测量,处理转换成压力量,给出校准结果。
当进行传感器系统校准时,因机载计算机输出的是气压高度、空速值。为便于比较,主控系统要将静压、差压换算成对应的气压高度、空速值。
2 机载测量系统校准设备设计与实现
机载测量系统校准设备主要用于校准无人机的无头温度传感器、气压高度传感器、动态压力传感器、机载垂直陀螺仪和角速率陀螺仪,确保机载测量系统始终处于良好的技术状态。
2.1 硬件设计
通过对机载测量系统需校准的传感器进行分析,校准参数有温度、压力、角度。因此,设备应包括温度标准设备、压力标准设备和角度标准设备。其中,温度标准装置和压力标准装置选自购买的便携式装置,角度标准装置使用自制无人机飞行姿态校准表。
机载测量系统的校准设备硬件主要包括:干井式温度校验器、静压压力校验仪、差压压力校验仪、无人机姿态校准台等,机载测量系统校准设备硬件原理如图3所示。
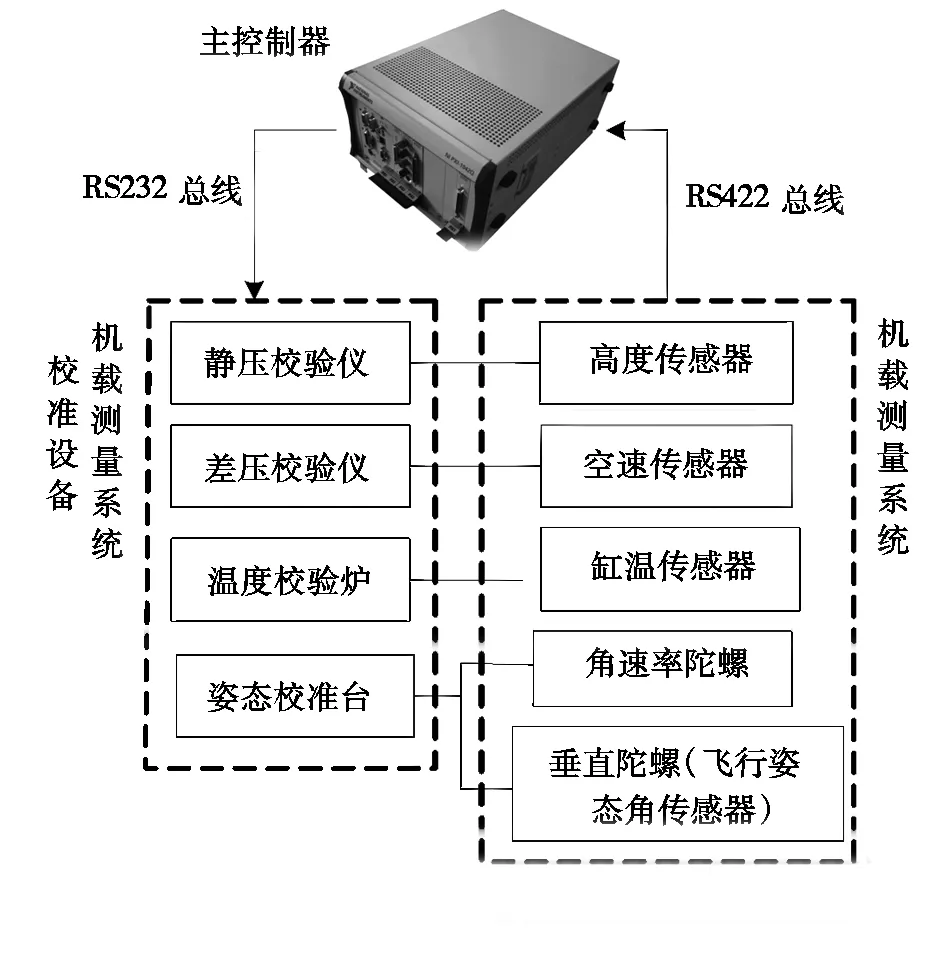
图3 机载测量系统校准设备原理框图Fig.3 Principle block diagram of calibration equipment for airborne measurement system
图中的干井式温度校验器,静、差压压力校验仪以及无人机飞行姿态校准台分别为温度参数、压力参数及角度参数的标准装置,各部分的主要功能如下:
2.1.1 干井式温度校验器
干井式温度校验器的主要作用是为气缸头温度传感器提供一个稳定均匀的温场,其炉内的温度由内部的高稳定铂电阻温度计来测量,通过比较标准温度信号和传感器感应温度信号,为气缸盖温度传感器提供标准激励信号,实现气缸盖温度传感器的校准。
2.1.2 静压、差压压力校验仪
静压、差压压力校验仪的主要作用是为气压高度传感器和动压传感器提供标准激励信号,通过对标准压力信号和传感器感应压力信号的比较,实现气压高度传感器和动态压力传感器的校准。
2.1.3 无人机姿态校准台
无人机姿态校准台的主要作用是为机载陀螺和角速率陀螺提供标准角激励信号,通过对标准姿态角信号和陀螺感应信号的比较,标准角速率信号和角速率陀螺感应信号的比较,实现对陀螺和角速率陀螺的校准,此校准台是机载测量系统校准设备中的重要组成部分。
2.1.4 环境温度测量模块
环境温度测量模块提供无人系统测试现场环境的温度数据。 以 Dallas半导体公司生产温度传感器为感应头,通过对测量数据处理,实现对温度实时测量。由于DS18B20采用单总线协议模式,即在一条数据线上双向传输数据,工作流程为:初始化ROM操作指令存储器操作指令数据传输。其工作时序包括初始化时序,写时序和读时序。对于89 S51微控制器,硬件不支持单总线协议。该方法是模拟单个总线的协议时序,以完成对DS18 B20芯片的访问。 温度测量结果通过RS-232接口传输到主机。
2.2 无人机姿态校准台设计
2.2.1 结构设计
校准台[3-4]主要由高精度转台及其控制系统组成,如图4所示。分别实现X、Y两个轴的转动。每个子系统由平台,驱动系统,旋转系统和执行器组成。选用交流伺服电机作为各子系统驱动装置,经蜗杆蜗轮减速后输出旋转运动。 在转盘的两个子系统中,Y轴转盘(即内框架3)固定在X轴转盘(即外框架1)的转盘上。X轴(即外框1)转台固定在机架上。 将陀螺仪固定在Y轴转盘的转盘上,并根据校准要求控制转盘各轴的旋转。模拟飞机飞行中的各种态度,比较转盘的姿态和系统的输出,以校准飞行姿态。
高精度的校准台设计成功的首要保证是合理设计总体方案,包括机械结构设计及制造和控制系统设计两个部分, 项目组在对转台构成的关键结构进行详细分析后,选择完善的总体设计方案,并制作出样机。
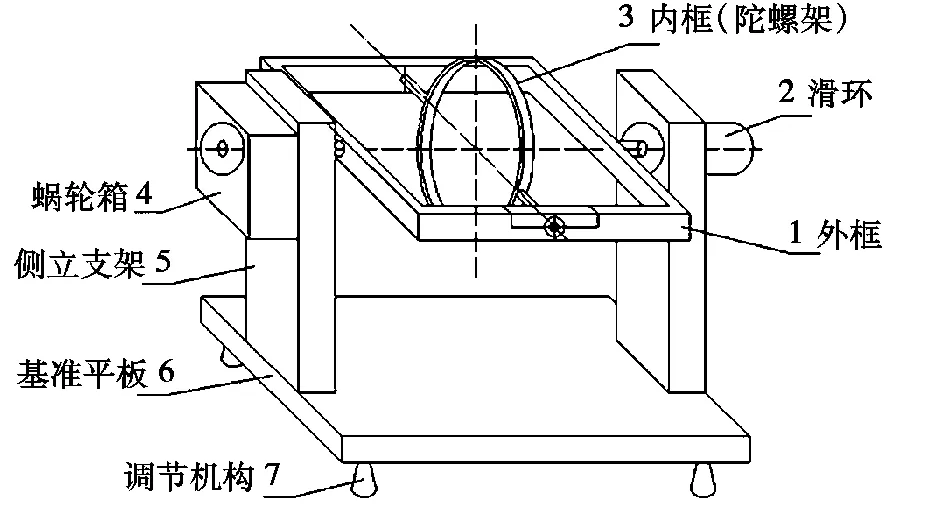
图4 无人机姿态校准台示意图Fig.4 The schematic diagram of UAV attitude calibration platform
2.2.2 原理设计
校准台机械结构由框架结构、动力源、支承结构、驱动方式、轴系结构、配重方式等组成。其原理如图5所示。
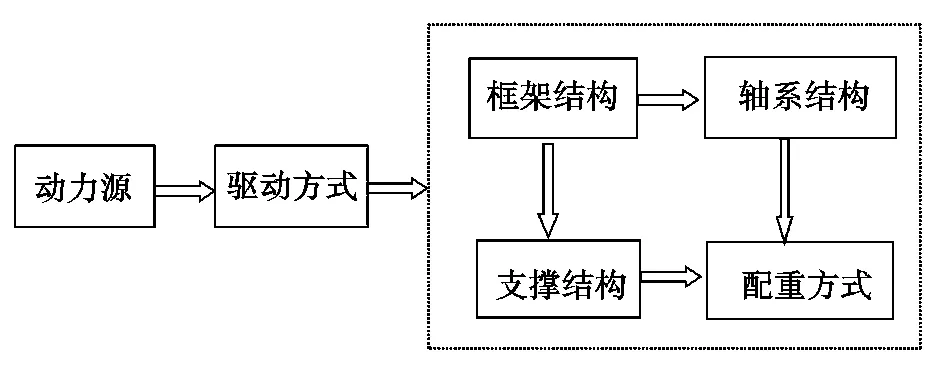
图5 无人机姿态校准台原理框图Fig.5 Principle block diagram of UAV attitude calibration platform
2.2.3 控制程序设计
根据姿态校准台工作方式需要,电机控制程序包括初始化串口,以规定角度转动,以规定角速率转动等多个步骤[5],为了实现电机转动时的速度可调和,转动过程中可根据需要紧急停止等功能,在电机控制协议中规定了电机编号、电机转动方向、转动角度、转动角速度、急停标志等多个字段。电机以规定角度转动时,为了实现电机的平稳转动,设计了电机启动和停止时的升降速曲线。电机控制程序流程如图6所示。
2.3 软件设计
机载测量系统软件模块可校准无人机上的主要传感器,如温度传感器,气压高度传感器,动态压力传感器和垂直陀螺仪。
温度传感器校准模块选择无人机温度传感器或选择所有传感器进行校准。校准时,软件设置5个温度的标准值,并通过控制干燥温度检查器的标准值来加热温度传感器。
压力传感器模块分为气压高度传感器校准与动压传感器校准[6],两个校准过程基本相同:开始校准后,首先通过标准压力仪设定压力传感器的标准值,待稳定后再从遥测帧中读取压力传感器的实际值,最后将压力标准值与实测值记录入数据库。
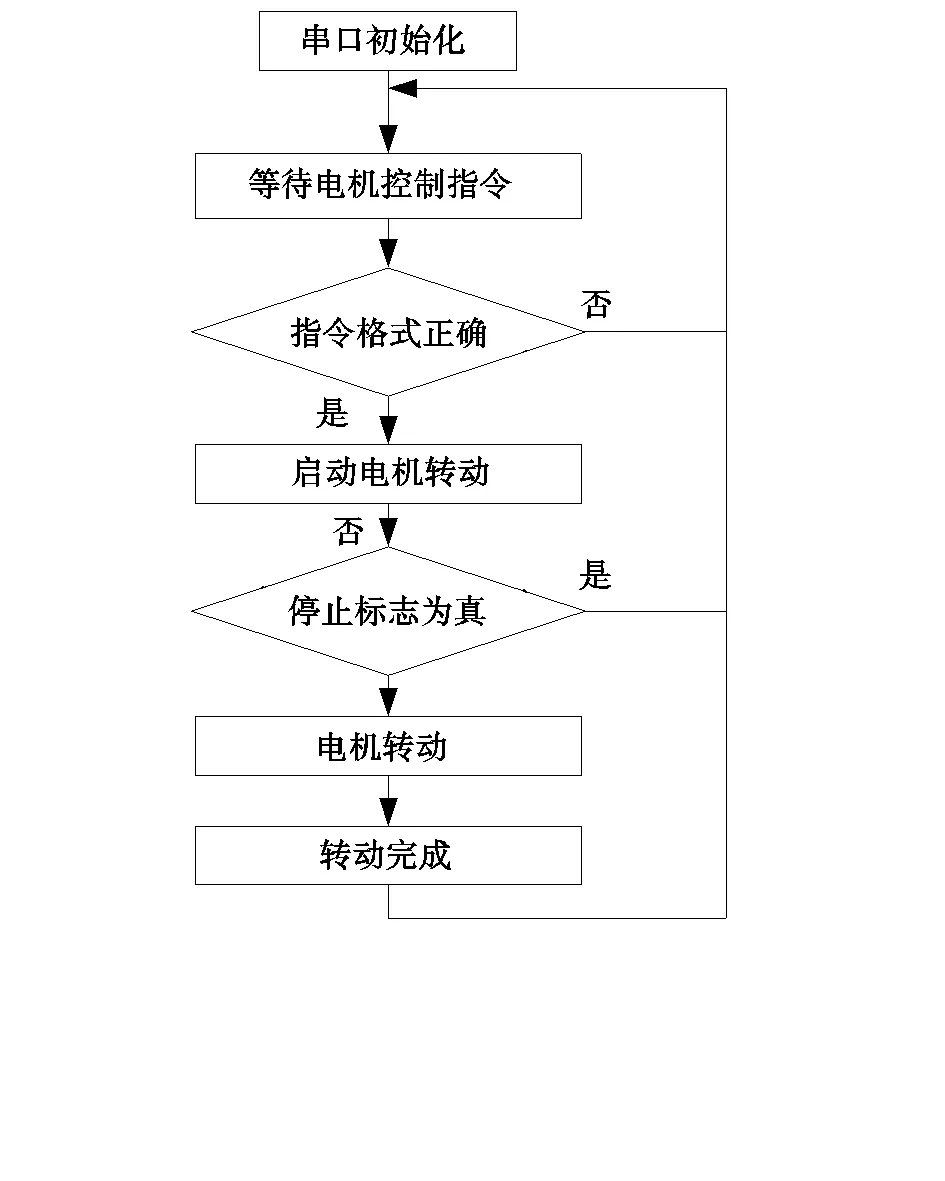
图6 电机控制程序流程图Fig.6 Flow chart of motor control program
垂直陀螺模块校准模块:首先由用户设定陀螺转动的间隔时间,开始校准后主机控制转台使陀螺转动到规定的标准角度值,待陀螺稳定后读取陀螺的实际角度值显示,然后再进行下一个角度的校准,回程完成几次校准后,将所有校准结果呈报表形式显示并记录入数据库。
角速率陀螺校准模块:由程序设定5个校准台的转角速率,开始校准后主机控制标准台转动,读取角速率陀螺的实际感应的角速率值,显示并记录入数据库,然后再进行下一个角度的校准,回程几次校准后,将所有校准结果呈报表形式显示。
校准模块的程序流程如图7所示。
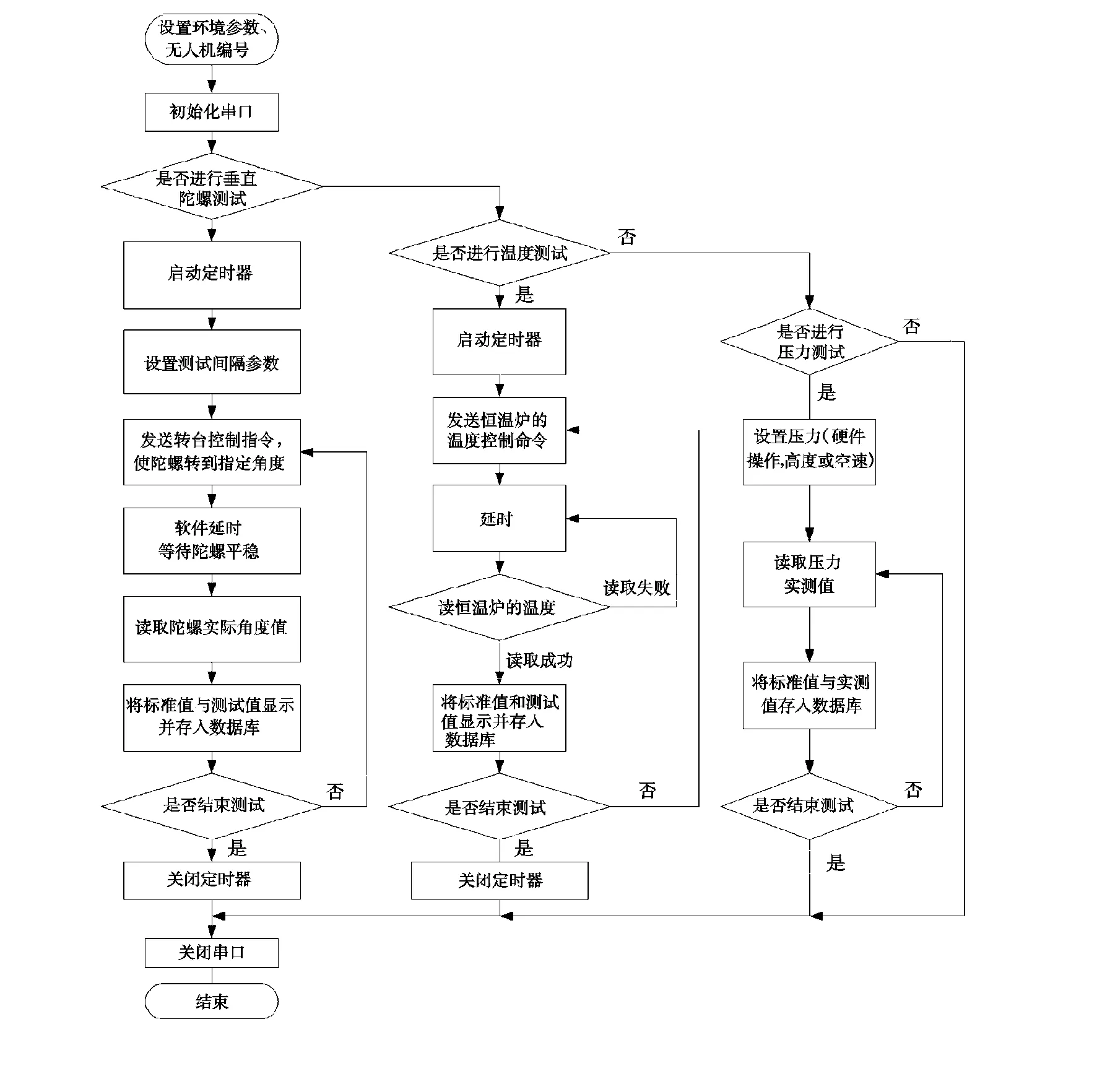
图7 机载测量系统校准模块流程图Fig.7 Flow chart of calibration module for airborne measurement system
3 结论
本文设计了无人机飞行姿态角动态测试仿真平台,并以无人机姿态校准表作为飞机姿态角的标准姿态。为垂直陀螺仪和角速率陀螺仪提供高精度空间角度激励源。不仅能满足基层单位校准陀螺的需求,也可为无人机研制单位飞行控制设计师提供半实物仿真的试验平台[7],进行理论分析及验证的试验装置。
