预变形量在悬挂式空列立柱工程设计中的应用研究
2019-10-21康亚强郭彦云李永文李琪英
康亚强 郭彦云 李永文 李琪英

摘 要:悬挂式空列立柱在线路使用中会产生整体侧向变形以及悬臂端竖直向下的变形,在设计中通过选取适当的控制点,就可简单有效的根据预变形量提前为每根立柱设计添加反变形,使立柱在线路使用中的反变形与预变形量接近相等达到相互抵消的目的,以满足线路设计与运营的要求。
关键词:预变形量;立柱;悬挂式空列;反变形
引言:
随着城市轨道交通在我国的迅速发展与推广,各种形式的轨道交通迎来了快速发展的新时期。跨座式单轨交通、磁悬浮轨道交通、城市地铁、城市有轨电车,以及悬挂式空列轨道交通等,均在不同范围内获得了广阔的发展空间。悬挂式空列轨道交通相比于其它幾种类型的城市轨道交通发展应用较晚,但其凭借着独特的结构形式与更加宽广的视觉享受体验,受到了各大旅游城市与大型景区的青睐。
悬挂式空列轨道交通线路一般采用钢梁与钢立柱结构形式,立柱按照线路使用特点可分为“倒L”型和“Y”型两种形式。悬挂式空列在线路结构设计时,立柱会产生整体侧向变形以及悬臂端竖直向下变形,如果不对立柱的变形进行控制与抵消,就会使与之相连接的轨道梁在每个立柱连接点处产生各不相同的侧向位移和竖向位移,导致轨道实际线路线型和线路的高低起伏,与设计的线型与起伏变化产生误差导致线路变形,给线路运营与车辆行走造成影响。因此对悬挂式空列立柱的预变形量进行研究,对其进行控制并抵消,使实际线路按照设计起伏变化具有重要的意义。
1悬挂式空列立柱及其预变形量
如图1所示某线路设计简图为例,线路由A点起始,经B-C1段进入左侧线路可到达终点M点,经B-C2段进入右侧线路可到达另一端终点N点,其中B-C段为道岔区域,实现线路转辙换线。
图1中A-B段、C1-D1段、E1-N段,以及C2-D2段和E2-N段,线路仅有一条或间距不断变化的两条,若用图2右图所示的“Y”型立柱同时将两侧轨道吊起既不方便设计也由于悬臂过大而不经济,因此线路采用了图2左图中所示的“倒L”型结构的立柱形式;D1-E1段与D2-E2段线路间距与线形趋势相同,一般采用图2右图所示的“Y”型立柱同时将两侧轨道吊起的方式。
图1 线路简图 图2 倒“L”型立柱与“Y”型立柱
1.1 倒“L”型立柱的受力与变形分析
由于倒“L”型悬挂式空列立柱的使用时均是受到一侧悬臂端向下拉力的作用,立柱柱身部分会产生y向倾斜变形△y,悬臂端会产生下拉变形△z,本文将正常状态下立柱的y向倾斜变形量△y与z向下拉变形量△z统称为立柱的预变形量。预变形量△y与△z的大小与立柱各个截面的惯量I、立柱高度h、立柱材料的特性E、引起立柱产生变形的主要载荷F相关;其中引起立柱产生y向倾斜变形△y与下拉变形△z的主要载荷有立柱自重G1、轨道梁自重G2、正常载客状态下的车辆载荷G3,因此引起立柱产生变形的主要载荷F=(G1+G2+G3)×g。
1.2 “Y”型立柱的受力与变形分析
与倒“L”型悬挂式空列立柱相同,“Y”型立柱使用中悬臂端受到向下拉力的作用,立柱柱身部分会产生y向倾斜变形△y,悬臂端会产生下拉变形△z。不同的是,“Y”型立柱由于自身结构对称,两侧同时承受轨道梁的自重G2,因此引起其产生变形的主要载荷仅是正常载客状态下的车辆载荷G3。由于车辆载荷G3一般不会同时施加于“Y”型立柱的两侧悬臂之上,y向倾斜变形△y方向左右变化,并无有效方法将其进行抵消,因此在“Y”型立柱的结构设计中仅考虑下拉变形△z。
1.3 立柱预变形量分析
预变形量△y与△z的数值可根据立柱的实际结构尺寸,通过设计计算或仿真计算得出。一般而言,一条空列线路上立柱的主要结构部分是均是相同的,不同的是根据线路地形对立柱高度h进行了调整。对倒“L”型立柱而言,立柱高度h变化会引起预变形量△y与△z同时变化,因此需分别对每根立柱按照预先给定的预变形量△y与△z,设计出与其反方向的变形△-y与△-z;而对“Y”型立柱而言,仅需设计与预变形量△z反方向的变形△-z。这样,立柱在使用状态下,由载荷引起的立柱变形△y与△z刚好与反方向变形△-y与△-z相互抵消,使与立柱相连接的轨道梁能够处于线路设计的位置范围内,且倒“L”型立柱的受力状态也会得到改善。
2 预变形量在倒“L”型立柱结构中的确定及设计
要在立柱设计时加入预变形量,首先需要得到对应立柱的预变形量数值,一般倒“L”型立柱的预变形量由图2中的两个控制点A、B的变形量来确定,通过在立柱A、B两点位置处设计的反向变形来控制立柱整体的位置尺寸,这是倒“L”型立柱相较于“Y”立柱的一大优点。
下面以线路中的某一根立柱为例,对其变形控制进行设计,其结构与图2中相同。其中立柱柱身部分为800x800mm矩形结构,两处结构拐点处设有内隔板,两处用于悬挂轨道梁的钢板为70mm,其余主体结构部分钢板厚度均为28mm。
2.1 预变形量△y与△z的确定
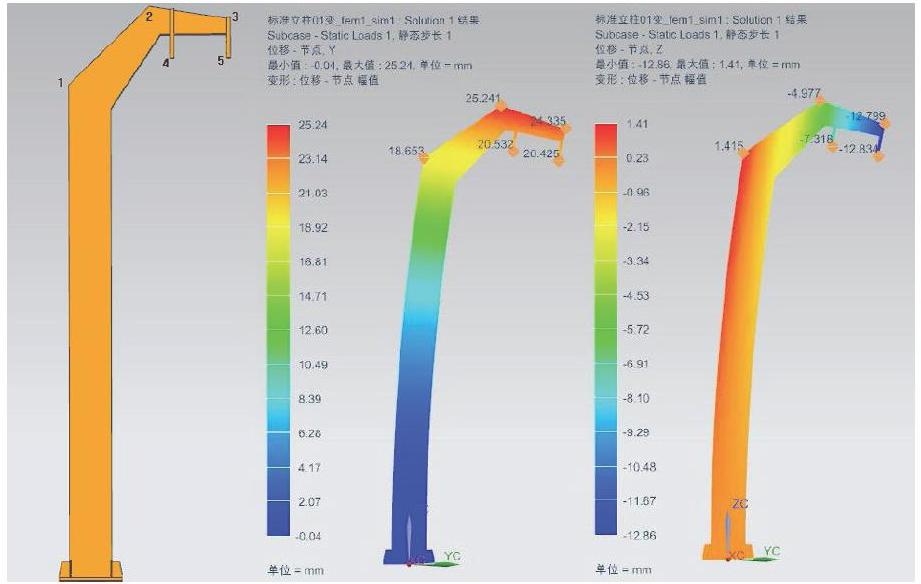
如下图3所示,通过NX10软件对未控制变形的立柱进行三维建模,并取5个观测点对变形进行测量。加载前将立柱底板进行固定,在轨道梁的悬挂安装位置加载350000N模拟载荷,并考虑立柱自重G。由图中立柱变形可知,立柱在受到向下载荷F时,立柱整体产生了向右倾斜变形,同时悬臂端产生较大幅度的下挠变形。
由5个观测点分别得出各点的立柱变形△y1与△z1如表1所示。各点△y值由左向右整体呈增大趋势,其中点3、点4、点5由于结构弯曲回转原因小于点2;各点△z值依照由左向右所处位置呈减小趋势,其中点1为正值,说明立柱左侧由于受力产生了拉伸变形,点3、点5处于同一块钢板上,因此变形相近。
由于观测点1的变形△y相较于其它点更加便与测量,取其作为y方向变形控制点;观测点3处于立柱悬臂端最远处,其z向变形与点5相近且便于测量,取其作为z方向观测点。
2.2 反变形量-△y与-△z在立柱中的设计
如图4 所示,观测点1、点5分别对应A、B控制点。立柱底板固定不变,将A点以C点为基准旋转距离a=18.758mm,将此时柱身与底板在右侧位置产生距离e=1.6mm补齐至底板,完成对反变形量-△y的添加;且此时AC间距离为原设计尺寸,便于复查与检测。
如图,再将悬臂段作为整体,将B点以D点为基准,旋转至预先确定的高度HB+(-△z),完成对反变形量-△z的添加。其中HB为B点加载前的设计高度,△z=12.882mm,
需要注意的是,在完成变形量-△y的添加后,D点y向与z向的相对位置已经发生变化,不能以D点为基准将悬臂端B点直接旋转偏移△z=12.882mm。
下面,对以A、B作为控制点为倒“L”型立柱添加反变形量-△y与-△z之后的变形,以相同的受力条件进行三维建模与变形分析,如图5所示。
添加反变形量-△y与-△z之后,5个观测点的变形△y2与△z2统计如表2所示。
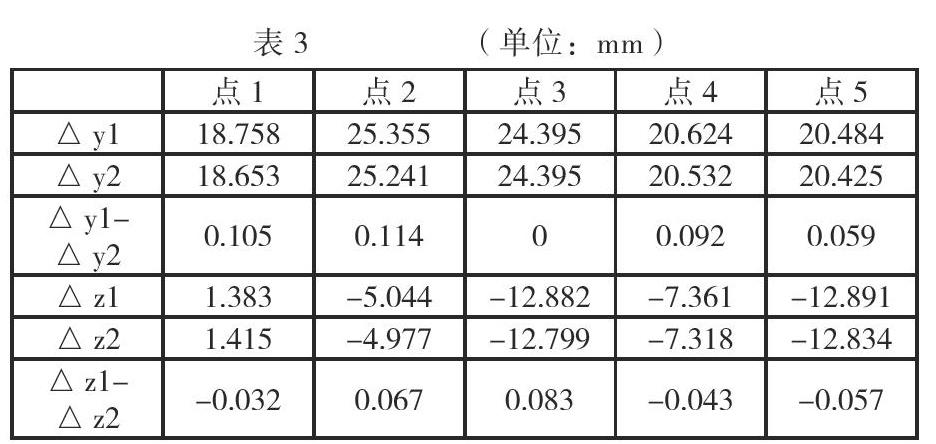
对表1、表2中各观测点的△y1与△y2、△z1与△z2进行比较可知(见下表3),以点A、B作为控制点,将预变形量添加至倒“L”型立柱上后,控制点A、B以及其余观测点处的在y与z方向的变形量与未添加预变形量的立柱变形量差值可控制在0.12mm以内,符合工程实施要求,且方法简单便于操作。
3 预变形量在“Y”型立柱结构中的确定及设计
预变形量△z的确定与前面倒“L”型立柱预变形量的确定方法类似,通过软件建模与仿真即可得出。不同的是,“Y”型立柱在载荷添加时,需要分别在两悬臂侧添加轨道梁自重载荷G2,然后仅在某一侧加载车辆载荷G3。“Y”型立柱受车辆载荷G3变形时,由于受另一侧轨道梁自重载荷G2的反向平衡作用,其预变形量△z相对于倒“L”型立柱而言要小很多。
根据倒“L”型立柱反变形设计时基准点的选择与仿真效果,得知在反变形基准点的选择时并无严格的要求,主要考虑设计与生产施工的便利性。因此在“Y”型立柱的反变形量-△z的添加时,我们对以悬臂斜撑段的角平分线与立柱中心的交点A为基准点,和以悬臂拐点C(分C1、C2点)为基准点进行了分析:两种方式均可对控制点B进行反变形量-△z的添加,并能满足线路设计与使用要求;不同之处在于,以A点为基准点对控制点B添加反变形量-△z时,由于旋转半径不同,对立柱整个悬臂段在y方向的影响不同,以A点为基准点影响较大一些。因此,“Y”型立柱在设计添加反变形量-△z时,全线路必须采用统一的基准点,避免混乱。
4 结束语
本文通过对悬挂式空列倒“L”型立柱、“Y”型立柱預变形量的分析与变形仿真,针对两种不同形式的立柱给出了一种将预变形量提前设计进去立柱结构的设计方法,通过此方法,可将反变形量快速加入到所设计的立柱中去,使添加预变形量后的立柱在应用中可以较好的满足线路设计与使用要求,对同类型立柱结构设计具有重要的参考意义。
参考文献:
[1]秦武.空中轨道交通系统的适用性分析[J],城市公用事业,2012.
[2]苗健.基于有限元法的立柱线性屈曲分析[J].黑龙江科技信息,2006.
[3]陈前,区彤,杨剑维等.肇庆火车站长悬臂钢结构雨棚设计[J],建筑结构,2017.
作者简介:康亚强;(1985-1);汉;陕西省宝鸡市;硕士;高级工程师;研究方向:城市轨道交通结构与机械产品研究与设计
