地震模拟振动台试件与台面相互作用的力反馈补偿控制
2019-10-21李芳芳纪金豹李小军
李芳芳 纪金豹 李小军


摘要: 电液伺服地震模拟振动台试验过程中存在试件与台面相互作用,导致振动台系统的幅频特性曲线在试件自振频率及附近范围产生峰值和陷波,影响台面振动的实际输出。为消除试件与台面相互作用对振动台系统控制性能的影响,在三参量控制的基础上引入力反馈补偿控制,并通过单台振动台试验中单自由度试件、多自由度试件模型进行了试验仿真分析,结果表明力反馈补偿控制补偿了试件与台面相互作用对振动台系统性能的影响,通过控制方法的误差影响分析验证了该方法对于振动台试验控制的有效性。
关键词: 结构抗震; 振动台; 试件与台面相互作用; 力反馈补偿; 误差影响分析
中圖分类号: TU352; TB534+.2 文献标志码: A 文章编号: 1004-4523(2019)04-0685-10
DOI:10.16385/j.cnki.issn.1004-4523.2019.04.016
引 言
利用地震模拟振动台试验进行结构抗震试验,可以在实验室中实时再现各种地震动的作用过程。相比拟静力试验、拟动力试验而言,地震模拟振动台试验能更好地反映结构在地震作用下的响应,在开展地震工程相关研究领域占有重要的地位[1-4]。目前为止,国内外大多数电液伺服地震模拟振动台采用三参量控制(TVC)[5-6],其中位移反馈可以调节系统的整体增益;速度反馈可以有效扩展系统的频宽;加速度反馈可以有效增加系统的阻尼比[1-2, 6-9]。黄浩华[1]、邱法维[10]将压差反馈直接引入闭环控制,指出压差反馈可以增加振动台系统的阻尼比,提高系统的稳定性,同时具有扩宽系统频带的作用。Stehman等[11]提出一种加速度和力反馈复合控制算法,该控制算法中无位移反馈环节,利用力反馈闭环解决液压缸作动器偏移的问题。Ammanagi等[12]将Pseudo derivative feedback (PDF)控制应用于地震模拟振动台系统控制中,该算法在不考虑比例(P)控制的基础上用反馈信号的微分代替误差的微分(D环节)。上述控制方法通常将基础视为刚体,台面与试件为一体,且荷载性质为纯惯性负载。然而试件是具有较大质量的弹性体,台面与试件之间产生的共同耦合作用不仅影响振动台系统的频率特性,而且影响台面的振动再现精度[1]。Blondet等[13]于1988年建立了考虑试件为单自由度结构的数学模型,对位移控制下振动台与结构相互作用进行了研究,并指出:台面与试件相互作用对试件自振频率及其附近范围频率的振动跟踪性能以及系统的稳定性有很大影响;系统幅值频率响应曲线在试件自振频率及其附近范围频率出现峰值和陷波,并伴随着相位滞后现象。李暄等[14]通过对N个自由度的试件作用下振动台系统的理论分析指出:当振动台振动强度较大时,试件的非线性性质对振动台系统传递函数影响较大,台面振动再现精度降低;提高台面质量与试件质量之比是提高台面振动再现精度的方法之一,只有当试件质量远小于台面质量时才可忽略试件对系统性能的影响。Dyke等[15]在结构主动控制研究中考虑了控制-结构相互作用(CSI)对系统控制性能的影响,建立了作动器-结构相互作用模型。Kajiwara等[16]、Maoult等[17]针对试件与振动台台面的边界条件进行了有限元分析,验证了台面与试件相互作用的影响。Crewe等[18]、Symans等[19]对其进行对比试验研究,试验结果表明试件对振动台的影响不可忽视。Conte、Trombetti[20-22]对同时考虑基础、试件、台面三者之间的相互作用的系统进行了仿真分析以及试验验证,指出相比基础而言,试件对振动台性能的影响较大,试件的自振频率成为振动台系统的第二共振频率,影响该频率附近的台面振动再现精度;同时由于试件质量增加,降低了系统的油柱共振频率。李振宝等[23]分析了单自由度、多自由度柔性负载在刚性负载设计参数、空载设计参数控制下对振动台系统稳定性的影响,并通过实例仿真表明:空荷参数设计下可以很好地解决负载对地震模拟振动台控制系统稳定性的影响。此外,唐贞云等[24]针对试件质量、频率、阻尼等因素对振动台系统性能的影响进行了分析,指出试件与台面相互作用不可忽视,试件自振频率附近频带的输入波再现精度低;试件质量、频率、阻尼均对试件与台面相互作用产生不同程度的影响,相比之下频率影响最大,阻尼次之,质量影响最小。综上所述,国内外专家学者研究表明:由于试件与台面相互作用的存在,电液伺服地震模拟振动台系统在试件自振频率及其附近范围频率产生峰值和陷波,影响台面振动的输出。
国内外学者对试件与台面相互作用产生的不良影响和控制方法进行了深入研究。Dozono,Horiuchi等[25-26]提出一种自适应滤波补偿(AFC),Iwasaki等[27]提出一种基于干扰观测器的补偿控制方法,Seki等[28-29]提出一种采用自适应陷波滤波器在线辨识频率的自适应反馈补偿,来消除台面与试件相互作用对地震模拟振动台控制性能的影响,提高振动台台面振动再现精度。唐贞云等[24]在分析试件特性对振动台系统性能影响的基础上,针对试件与台面相互作用问题提出了一种实时反力补偿的方法,该方法利用理论模型近似计算试验试件反力,较好地补偿了试件与台面相互作用的影响,提高了振动台控制精度,但是对于多自由度试件而言,该方法需要根据主导振型的惯性力来确定补偿反力。Phillips等[30]提出一种基于模型的多度量反馈控制方法,该方法通过传递函数迭代(TFI)来获得前馈输入信号,利用线性二次型最优控制(LQR)调节位移和加速度反馈的输出权重,提高了台面加速度的跟踪性能,并将其应用于小型电动振动台。田磐等[31-32]提出一种基于弹性负载的地震模拟控制策略,该方法通过分析弹性试件力学模型设置内环伺服控制,实现系统传递特性的近似统一,通过基于自适应控制的外环控制对负载效应产生的共振峰与反共振峰进行有效补偿,但是内环伺服控制参数设置所需的视在质量仍需要通过对试件进行模态分析获得。
尽管各国学者对振动台试验中试件与台面相互作用问题进行了大量的研究,并提出一系列补偿控制算法,但各种算法研究对象不同,适用范围也不同,因此振动台试件与台面相互作用的研究有待进一步的深入。本文针对上文提到的地震模拟振动台试验过程中存在试件与台面相互作用的问题,开展单台振动台试验中单自由度试件、多自由度试件模型的试验模拟分析,并在现有三参量控制的基础上引入力反馈补偿控制,以消除振动台试验中试件与台面相互作用对振动台系统性能的影响,提高试验效果。
1 振动台试验试件-台面相互作用系统模型 在传统的电液伺服地震模拟振动台系统建模时,通常将试件和台面共同视为单自由度体系,假定其荷载性质为惯性负载 [4,13]。实际上试件是具有较大质量的非刚性体,试件与台面之间产生的共同耦合作用不仅影響振动台系统的频率特性,而且影响台面的振动再现精度。因此,本文在传统的电液伺服地震模拟振动台系统模型的基础上,假定固定于振动台台面上的试件分别为单自由度试件和三自由度试件,建立考虑试件与台面相互作用的电液伺服地震模拟振动台试验系统模型。
1.1 单自由度试件-振动台试验系统
在电液伺服控制地震模拟振动台试验系统中,固定于台面的试件为单自由度(SDOF),则考虑单自由度试件的地震模拟振动台系统原理图如图1所示。图中,ps为供油压力;pR为回油压力;p1为进油腔压力;p2为回油腔压力;pL为负载压力;xv为滑阀阀芯位移;Q1为流进液压缸的进油腔的流量;Q2为液压缸回油腔流出的流量;V1,V2为激振器液压缸两端的充油体积;Cec,Cic为油缸的泄露系数;为台面质量;xT为台面位移;MP为试件质量;xP为试件相对台面的相对位移;CP为试件阻尼系数;kP为试件刚度系数。
(4)2 试件-振动台相互作用影响控制的力反馈补偿方法 现有文献[1,24]分析表明: 由于试件与台面的相互作用,系统在试件自振频率及附近范围内产生峰值和陷波,影响台面振动的输出。为消除试件与台面相互作用对地震模拟振动台系统性能的影响,本文在现有三参量控制的基础上,引入力反馈补偿控制(FFC),形成一种基于力反馈补偿的多参量反馈控制算法,以提高振动台台面振动输出的精度。其控制补偿原理和实现过程为:采用压差传感器或力传感器测得作动器出力,加速度传感器测得台面的加速度,计算得试件与台面的相互作用力;将试件与台面的相互作用力乘以阀控系统逆传递函数得到补偿信号,再将补偿信号通过反馈补偿到驱动信号中合成新的等效驱动信号,达到补偿试件与台面相互作用影响的目的。控制算法的实施架构如图5,6所示。图5为力反馈补偿单自由度试件与台面相互作用控制框图,图6为力反馈补偿多自由度试件与台面相互作用控制框图。
(7)3 控制方法的地震模拟振动台仿真分析
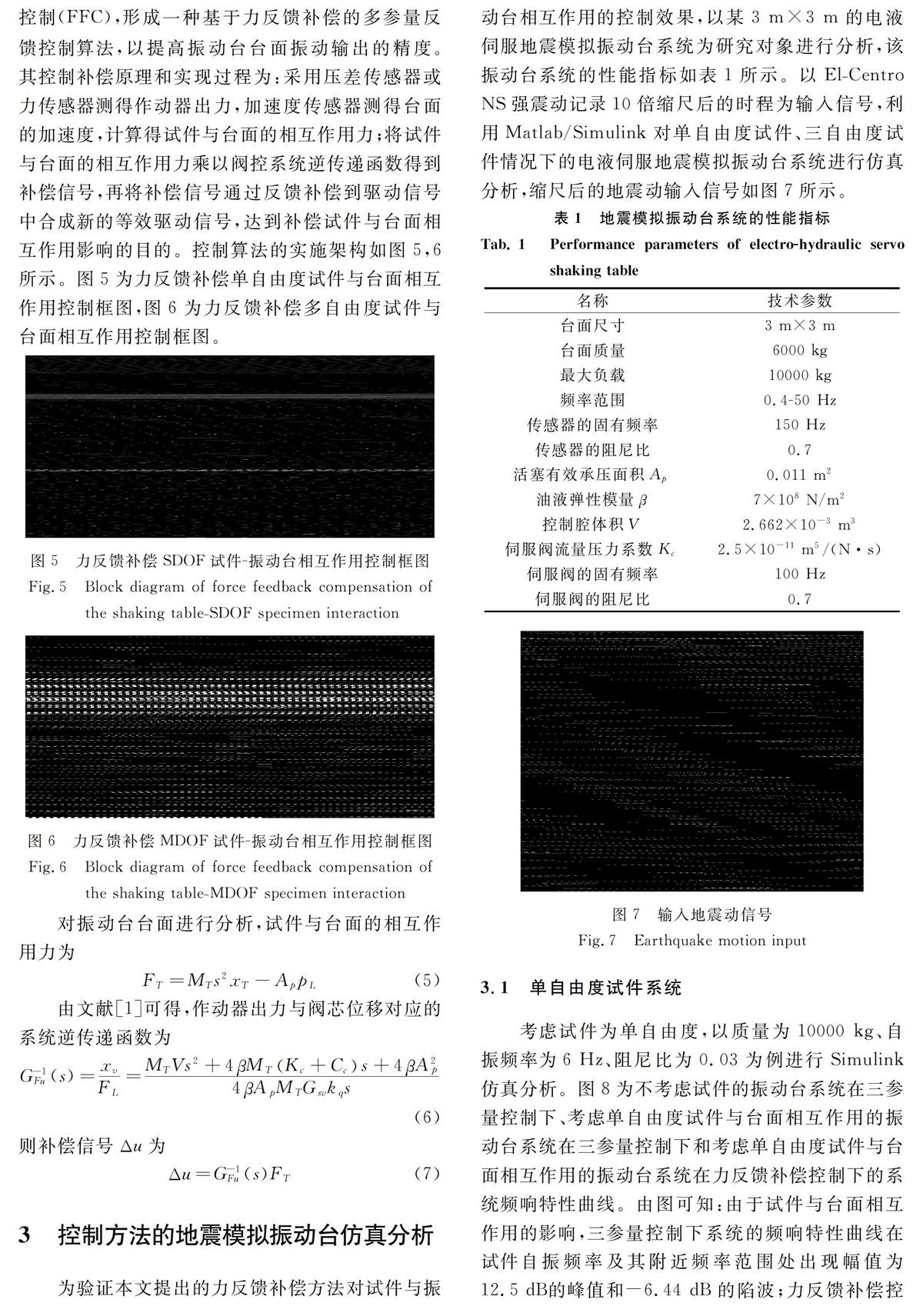
为验证本文提出的力反馈补偿方法对试件与振动台相互作用的控制效果,以某3 m×3 m的电液伺服地震模拟振动台系统为研究对象进行分析,该振动台系统的性能指标如表1所示。以El-Centro NS强震动记录10倍缩尺后的时程为输入信号,利用Matlab/Simulink对单自由度试件、三自由度试件情况下的电液伺服地震模拟振动台系统进行仿真分析,缩尺后的地震动输入信号如图7所示。
3.1 单自由度试件系统
考虑试件为单自由度,以质量为10000 kg、自振频率为6 Hz、阻尼比为0.03为例进行Simulink仿真分析。图8为不考虑试件的振动台系统在三参量控制下、考虑单自由度试件与台面相互作用的振动台系统在三参量控制下和考虑单自由度试件与台面相互作用的振动台系统在力反馈补偿控制下的系统频响特性曲线。由图可知:由于试件与台面相互作用的影响,三参量控制下系统的频响特性曲线在试件自振频率及其附近频率范围处出现幅值为12.5 dB的峰值和-6.44 dB的陷波;力反馈补偿控制下,系统的频响特性曲线在试件自振频率及其附近频率范围处的幅值均为0.09 dB,也就是力反馈补偿信号的引入消除了系统在试件自振频率及其附近范围频率处出现的峰值和陷波,补偿了试件与台面相互作用对振动台系统性能的影响。图9(a)为不考虑试件以及考虑单自由度试件与台面相互作用的振动台系统在三参量控制下的台面加速度时程曲线,图9(b)为不考虑试件以及考虑单自由度试件与台面相互作用的振动台系统在力反馈补偿控制下的台面加速度时程曲线。可以看到:力反馈补偿控制下的台面加速度时程曲线与空载状态下的台面加速度时程曲线完全吻合。图10(a)为不考虑试件以及考虑单自由度试件与台面相互作用的振动台系统在三参量控制下的台面加速度的傅里叶幅值谱,图10(b)为不考虑试件以及考虑单自由度试件与台面相互作用的振动台系统在力反馈补偿控制下的台面加速度的傅里叶幅值谱。可以看到:三参量控制下由于单自由度试件与台面相互作用的影响,台面加速度的傅里叶幅值谱在试件自振频率及其附近范围频率处出现峰值和陷波;力反馈补偿控制下,台面加速度的傅里叶幅值谱与空载状态下台面加速度的傅里叶幅值谱完全吻合。综上所述,通过系统Bode图、台面加速度时程曲线以及台面加速度的傅里叶幅值谱三个方面验证了力反馈控制补偿单自由度试件与台面相互作用影响的有效性。
3.2 多自由度试件系统
考虑试件为多自由度体系,以一个三自由度试件为例进行仿真分析,该三自由度试件的特性为:各质点质量为:m1=m2=m3=3000 kg;一阶频率为:w1=8.85 Hz;二阶频率为:w2=24.8 Hz;三阶频率为:w3=35.85 Hz;各阶振型的阻尼比为:ξ1=ξ2=ξ3=0.05。图11为不考虑试件的振动台系统在三参量控制下、考虑三自由度试件的振动台系统在三参量控制下和考虑三自由度试件的振动台系统在力反馈补偿控制下的系统频响特性曲线。由图可知:由于多自由度试件与台面相互作用的影响,三参量控制下系统的幅频特性曲线在1阶频率及其附近范围频率处出现幅值为13 dB的共振峰和幅值为-9.22 dB的陷波,在2阶频率处出现幅值为-8.02 dB的陷波,在3阶频率处出现峰值为-2.4 dB的陷波;力反馈补偿控制下,系统的频响特性曲线在多自由度试件的各阶频率及其附近范围频率处的幅值均为0.12 dB,也就是力反馈补偿信号的引入消除了系统在多自由度试件各阶频率及其附近范围频率处出现的幅值和陷波,补偿了试件与台面相互作用对振动台系统性能的影响。图12(a)为不考虑试件以及考虑三自由度试件与台面相互作用的振动台系统在三参量控制下的台面加速度时程曲线,图12(b)为不考虑试件以及考虑三自由度试件与台面相互作用的振动台系统在力反馈补偿控制下的台面加速度时程曲线。仿真结果表明力反馈控制下的台面加速度时程曲线与空载状态下的台面加速度时程曲线完全吻合。图13(a)为不考虑试件以及考虑三自由度试件与台面相互作用的振动台系统在三参量控制下的台面加速度的傅里叶幅值谱,图13(b)为不考虑试件以及考虑三自由度试件与台面相互作用的振动台系统在力反馈补偿控制下的台面加速度的傅里叶幅值谱。同样可以看到,力反馈补偿控制下台面加速度的傅里叶幅值谱与空载状态下台面加速度的傅里叶幅值谱完全吻合。综上所述,通过Bode图、台面加速度时程曲线以及台面加速度的傅里叶幅值谱三个方面验证了力反馈补偿三自由度试件与台面相互作用影响的有效性。
[6] Tagawa Y, Kajiwara K. Controller development for the E-Defense shaking table[J]. Proceedings of the Institution of Mechanical Engineers Part I:Journal of Systems & Control Engineering, 2007, 221(2): 171-181.
[7] 韩俊伟,于丽明,赵 慧. 地震模拟振动台三状态控制的研究[J]. 哈尔滨工业大学学报,1999,31(03):21-28.
Han Junwei, Yu Liming, Zhao Hui. Study of three state controller of seismic simulating shaking table[J].Journal of Harbin Institute of Technology, 1999, 31(03): 21-28.
[8] 李小军,李芳芳,纪金豹,等. 基于加加速度的地震模拟振动台控制技术[J]. 工程科学与技术, 2018, 50(3): 64-72.
Li Xiaojun, Li Fangfang, Ji Jinbao, et al. A new control technology of shaking table based on the jerk[J]. Advanced Engineering Sciences, 2018, 50(3): 64-72.
[9] Dimirovski G M, Mamucevski D J, Jurukovski D V, et al. A two-level computer control of biaxial shaking table using three variable local controllers[J]. IFAC Proceedings Volume,1987,20(5):45-50.
[10] 邱法維. 电液伺服地震模拟振动台模拟控制系统理论分析[J]. 哈尔滨建筑工程学院学报, 1989,(3):100-111.
Qiu Fawei. Theoretic study of the electronic-hydraulic servo analogue control system for earthquake simulation shaking table[J]. Journal of Harbin Architecture and Civil Engineering Institute,1989,(3): 100-111.
[11] Stehman M, Nakata N. Direct acceleration feedback control of shake tables with force stabilization[J]. Journal of Earthquake Engineering, 2013, 17(5): 736-749.
[12] Ammanagi S, Poornima V, Sera A, et al. Development of a digitally-controlled 3-axis earthquake shake table[J]. Currentence, 2006, 91(2): 190-203.
[13] Blondet M, Esparza C. Analysis of shaking table-structure interaction effects during seismic simulation tests[J]. Earthquake Engineering & Structural Dynamics, 1988, 16(4): 473-490.
[14] 李 暄,田石柱. 地震模拟试验中地震波再现精度的研究[J]. 哈尔滨建筑工程学院学报, 1993,26(4): 110-115.
Li Xuan, Tian Shizhu. Research on the reproductive accuracy of the earthquake wave in the earthquake simulating test[J]. Journal of Harbin Architecture and Civil Engineering Institute,1993, 26(4): 110-115
[15] Dyke S J, Spencer B F Jr, Quast P, et al. The role of control-structure interaction in protective system design[J]. Journal of Engineering Mechanics, 1995, 121(2): 322-338.
[16] Kajiwara K, Mituta M, Tagawa Y, et al. Control performance of shaking table-structure system with multi variable controller[C]. JSME Proceeding′s, 2004: 231-232.
[17] Maoult A, Queval J, Bairrao R. Dynamic interaction between the shaking table and the specimen during seismic tests[C]. Advances in Performance-Based Earthquake Engineering, The Netherlands: Springer, 2010, 13: 431.
[18] Crewe A J, Taylor C A, Mouzakis H P, et al. The performance of the shaking table control systems at the National Technical University of Athens, Bristol University and at ISMES, Italy[C]. Big Cities World Conference on Natural Disaster Mitigation:In Conunction with the 10th International Seminar on Earthquake Prognostics, Cairo,Egypt,1996.
[19] Symans M D, Twitchell B S. Analytical modeling, system identification, and tracking performance of uniaxial seismic simulators[J]. Journal of Engineering Mechanics, 2003, 129(12): 1485-1488.
[20] Trombetti T. Analytical modeling of a shaking table system[D]. Houston:The Rice University, 1996.
[21] Conte J P, Trombetti T L. Linear dynamic modeling of a uni-axial servo-hydraulic shaking table system[J]. Earthquake Engineering & Structural Dynamics, 2000, 29(9): 1375-1404.
[22] Trombetti T L, Conte J P. Shaking table dynamics: Results from a test-analysis comparison study[J]. Journal of Earthquake Engineering, 2002, 6(4): 513-551.
[23] 李振寶,唐贞云,周大兴,等. 试件特性对地震模拟振动台控制性能影响Ⅰ——对系统稳定性的影响[J]. 北京工业大学学报, 2010, 36(8): 1091-1098.
Li Zhenbao, Tang Zhenyun, Zhou Daxing, et al. Effects on the earthquake simulation caused by the characteristics of the specimen in the shaking table tests—Part 1: Effects on the stability of the system[J]. Journal of Beijing University of Technology,2010, 36(8): 1091-1098.
[24] 唐贞云,李振宝,周大兴,等. 试件特性对地震模拟振动台控制性能影响研究Ⅱ——对地震记录再现精度的影响及实时补偿[J]. 北京工业大学学报, 2010,36(9): 1199-1205.
Tang Zhenyun, Li Zhenbao, Zhou Daxing, et al. The effects on the earthquake simulation caused by the characteristics of the specimen in the shaking table tests—Part 2: The effects on the replaying precision of the recorded seismic waves and the real-time compensation[J].Journal of Beijing University of Technology, 2010,36(9):1199-1205.
[25] Dozono Y, Horiuchi T, Katsumata H, et al. Improvement of shaking-table control by real-time compensation of the reaction force caused by a non-linear specimen[C]. Seismic Engineering-2001, ASME,2001:247-255.
[26] Dozono Y, Horiuchi T, Katsumata H, et al. Shaking-table control by real-time compensation of the reaction force caused by a nonlinear specimen[J]. Journal of Pressure Vessel Technology,2004,126(1):122-127.
[27] Iwasaki M. Disturbance observer-based practical control of shaking tables with nonlinear specimen[J]. IFAC Proceedings Volumes, 2005, 38(1): 251-256.
[28] Seki K, Iwasaki M, Kawafuku M, et al. Improvement of control performance in shaking-tables by feedback compensation for reaction force[C]. 34th Annal Conference of IEEE Industrial Electronics, Orlando, FL, 2008.
[29] Seki K, Iwasaki M, Hirai H. Reaction force compensation with frequency identifier in shaking table systems[C]. 2010 11th IEEE International Workshop on Advanced Motion Control(AMC),Nagaoka, Niigata, 2010.
[30] Phillips B M, Wierschem N E, Spencer B F Jr. Model-based multi-metric control of uniaxial shake tables[J]. Earthquake Engineering & Structural Dynamics, 2014, 43(5): 681-699.
[31] 田 磐,陈章位. 基于弹性负载的地震模拟试验控制策略[J]. 振动与冲击, 2013, 32(5): 26-30,37.
Tian Pan, Chen Zhangwei. Control strategy in earthquake simulation test based on elastic payload[J]. Journal of Vibration and Shock,2013,32(5):26-30,37.
[32] 田 磐. 地震模拟振动台的时域复现控制策略研究[D]. 杭州:浙江大学, 2015.
Tian Pan. Control strategy research on replicate in time domain of earthquake simulation shaker[D]. Hangzhou: Zhejiang University, 2015.
Abstract: In the process of electro-hydraulic servo seismic simulation shaking table test, there exists interaction between the specimen and the surface, which results in the peak and notch of the amplitude-frequency characteristic curve of the shaking table system in the natural frequency of the specimen and its vicinity and affects the output of the shaking table. In order to eliminate the interaction effects on the performance of the shaking table system, the force feedback compensation control is introduced into the three-variable control. Through simulation analysis of the shaking table test system with the single degree of freedom specimen and multiple degree of freedom specimen show that the effects on the performance of the shaking table system generated by the interaction between the shaking table and specimen are compensated by the force feedback compensation control. The effectiveness of this method on control of the shaking table test is validated by analyzing the error impact on the control system.
Key words: aseismic structure; shaking table; shaking table-specimen interaction; force feedback compensation; error impact analysis
作者簡介: 李芳芳(1988-),女,博士。E-mail: fangfangbjut@126.com
通讯作者: 李小军(1965-),男,研究员。E-mail:beerli@vip.sina.com
