一类弹性碰撞振动系统周期倍化分岔预测及其神经网络控制
2019-10-21张惠卫晓娟丁旺才
张惠 卫晓娟 丁旺才

摘要: 针对一类单自由度含间隙和预紧弹簧的弹性碰撞振动系统的分岔控制问题,提出了一种基于Lyapunov指数及径向基函数神经网络的分岔预测及控制方法。首先建立了系统的Poincaré映射,推导了弹性碰撞振动系统周期运动存在的条件,研究了在主要分岔参数平面中的动力学分布;其次利用Lyapunov指数分析了系统的稳定性,提出利用追踪Lyapunov指数谱分岔点来预测周期倍化分岔发生的方法;最后基于径向基函数神经网络设计了参数反馈分岔控制器、基于周期倍化分岔点处的最大Lyapunov指数构造适应度函数,并利用Lyapunov指数判断是否实现了分岔控制,以引导自适应混合引力搜索算法对控制器的参数进行优选,从而实现周期倍化分岔控制。
关键词: 非线性振动; 非光滑系统; 周期倍化分岔; Poincaré映射; Lyapunov指数谱; RBF神经网络
中图分类号: O322; O343.5 文献标志码: A 文章编号: 1004-4523(2019)04-0626-09
DOI:10.16385/j.cnki.issn.1004-4523.2019.04.009
引 言
分岔是非线性系统所具备的独特现象且已经成为非线性动力学不可或缺的组成部分,分岔理论的研究不仅揭示了系统的各种运动状态之间的相互联系和转化,而且与混沌密切相关。对于非线性系统,分岔现象可能产生有害的动力学行为,需要避免或抑制;又或为了使系统产生人们所需要的分岔行为,需要设计适当的控制器以改变非线性振动的分岔特性。因此,对非线性系统的分岔分析和控制的研究具有重要的科学意义和广阔的应用前景[1]。研究分岔控制,可以有效地避免、延缓和消除分岔所导致的不良后果,对提高系统的稳定性和可靠性具有理论指导意义。
非光滑动力系统在机械、电路等领域十分普遍,它会导致类似于复杂非线性系统具有的分岔和混沌运动,然而很多分岔特性及机理又与普通光滑非线性系统完全不同 [2-10]。非光滑系统中含有的间隙、预紧、干摩擦等非光滑因素使其Poincaré映射在控制目标附近不可微,故基于局部线性化映射的各种控制策略及其推广形式不能胜任这类系统的混沌运动控制[11]。
周期倍化分岔过程是一条通向混沌的典型道路,因此消除或延迟周期倍化分岔的发生是控制混沌发生的一个有效方法。Abed等[12]提出了周期倍化分岔的局部镇定问题,并采用反馈控制延迟倍周期分岔的发生。唐驾时等[13]研究了Logistic模型的倍周期分岔的控制问题,设计了各种线性控制器,使倍周期分岔延迟或提前出现甚至消失。罗晓曙等[14]利用系统的状态反馈和参数调节的方法,有效地实现了离散非线性动力系统的倍周期分岔的延迟控制和混沌吸引子中不稳定周期轨道的控制。王学梅等[15]根据一般迭代映射的倍周期分岔定理,从数学上论证了电压型不连续导电模式(DCM)Boost和Buck变换器中倍周期分岔现象产生的条件, 由此揭示了 DC-DC 变换器中倍周期分岔现象发生的机理。姜海波等[16]基于Floquet理论揭示了Logistic映射周期解的分岔机理。卫晓娟等[17]应用基于RBF神经网络的智能优化控制方法研究一类含间隙碰撞振动系统混沌运动的控制,将混沌运动控制为预期的规则运动。文[18] 提出了一种不依赖被控系统数学模型的无模型自适应参数反馈混沌控制方法,研究了一类单自由度非光滑系统的混沌控制问题。文[19]通过分析對称性破缺分岔机制,采用了一个直接的、有效的线性控制器,精确控制了一类三次方对称离散混沌系统发生对称性破缺分岔和倍周期分岔时分岔点的位置。Souza 等[20]在碰撞瞬时,引进了具有动态变量的超越映射,计算了碰撞系统的李雅普诺夫指数谱。金俐等[21] 对n维刚性约束和分段光滑非光滑动力系统引进局部映射,利用映射分析方法得出了非光滑系统Lyapunov指数谱的通用计算方法。
本文针对一类单自由度含间隙和预紧弹簧的弹性碰撞振动系统的分岔控制问题,应用智能控制方法,提出了一种基于Lyapunov指数及径向基函数神经网络的分岔预测及控制方法。本文内容安排如下:首先建立了系统的Poincaré映射,推导了弹性碰撞振动系统周期运动存在的条件。利用Lyapunov指数分析了系统的稳定性;其次提出追踪Lyapunov指数谱分岔点来预测周期倍化分岔发生的方法;最后基于径向基函数神经网络设计了参数反馈分岔控制器,并基于周期倍化分岔点处的最大Lyapunov指数构造适应度函数(即利用Lyapunov指数预测周期倍化分岔的发生,以及判断是否实现了分岔的控制),以引导自适应混合引力搜索算法对控制器的参数进行优选,从而实现了周期倍化分岔的控制。
1 系统模型及其运动方程
1.1 力学模型
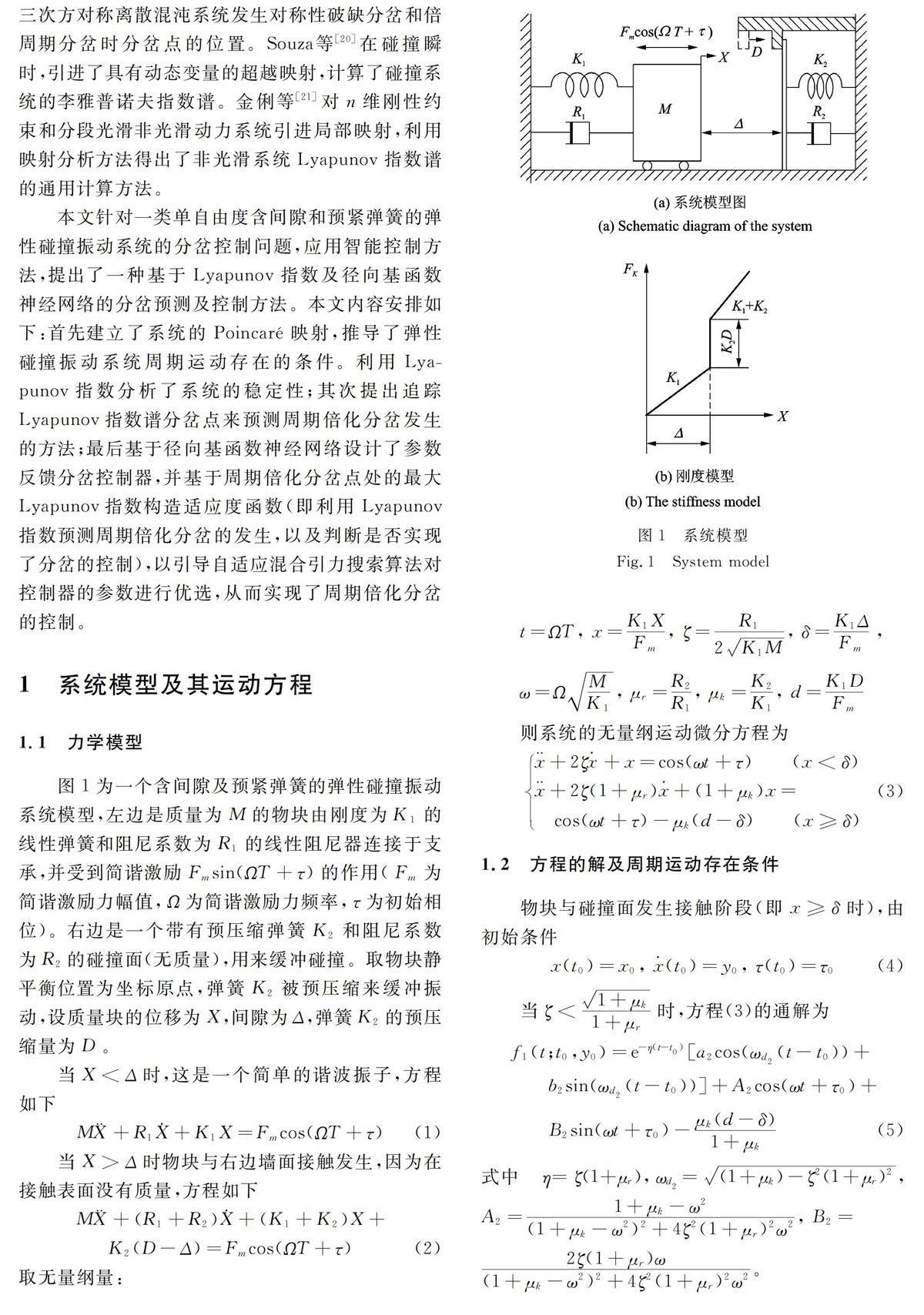
图1为一个含间隙及预紧弹簧的弹性碰撞振动系统模型,左边是质量为M的物块由刚度为K1的线性弹簧和阻尼系数为R1的线性阻尼器连接于支承,并受到简谐激励Fmsin(ΩT+τ)的作用(Fm为简谐激励力幅值,Ω为简谐激励力频率,τ为初始相位)。右边是一个带有预压缩弹簧K2和阻尼系数为R2的碰撞面(无质量),用来缓冲碰撞。取物块静平衡位置为坐标原点,弹簧K2被预压缩来缓冲振动,设质量块的位移为X,间隙为Δ,弹簧K2的预压缩量为D。
3.2.2 基于AHGSA的控制器参数优化流程
采用AHGSA算法使式(20)取得最小值的全局最优位置g即是RBF神经网络参数反馈分岔控制器的最优参数w,b和c,其具体优化流程如下:
1) 随机初始化粒子的位置和速度;
2) 按式(20)计算每个粒子的适应值;
3) 对每个粒子,将其适应值与个体历史最优、以及与全局最优进行比较,以更新当前的个体最优位置与群体最优位置;
4) 更新每個粒子的速度和位置;
5) 如未达到预先设定的停止准则,则返回步骤2),若达到则停止计算。
4 仿真研究
在确定神经网络隐层节点数时,在满足控制系统性能要求的前提下,以取尽可能紧凑的网络结构为原则,将网络隐层节点选定为5个。AHGSA算法的参数设置为:种群规模为30,最大迭代次数为100,G0=129,α=17,等比系数r=0.96。利用控制器分别对系统可控参数ω,δ施加微小扰动,以控制系统的周期倍化分岔行为,使系统趋于稳定的q=1/1周期运动状态。为了清楚地显示控制效果,前200次迭代不启动控制项,从第201次开始施加控制,图7(a)和(b)分别为调整ω和δ时的周期倍化分岔控制效果。由图可知,系统的q=2/2运动能够很快地被控制为q=1/1周期运动,实现了周期倍化分岔控制。同样的,q=4/4及混沌运动也可以很快地被控制为q=1/1周期运动。因调整参数ω和δ的控制效果是类似的,故只呈现了调整参数ω的控制效果图,如图8及9所示。
5 结 论
本文研究了一类单自由度含间隙和预紧弹簧的弹性碰撞振动系统模型,针对系统的分岔控制问题,提出了一种基于Lyapunov指数及径向基函数神经网络的分岔预测及控制方法。
(1) 建立了系统的Poincaré映射,推导了弹性碰撞振动系统周期运动存在条件,研究了系统不同周期运动状态在(ω,δ)参数平面的所处参数区域。
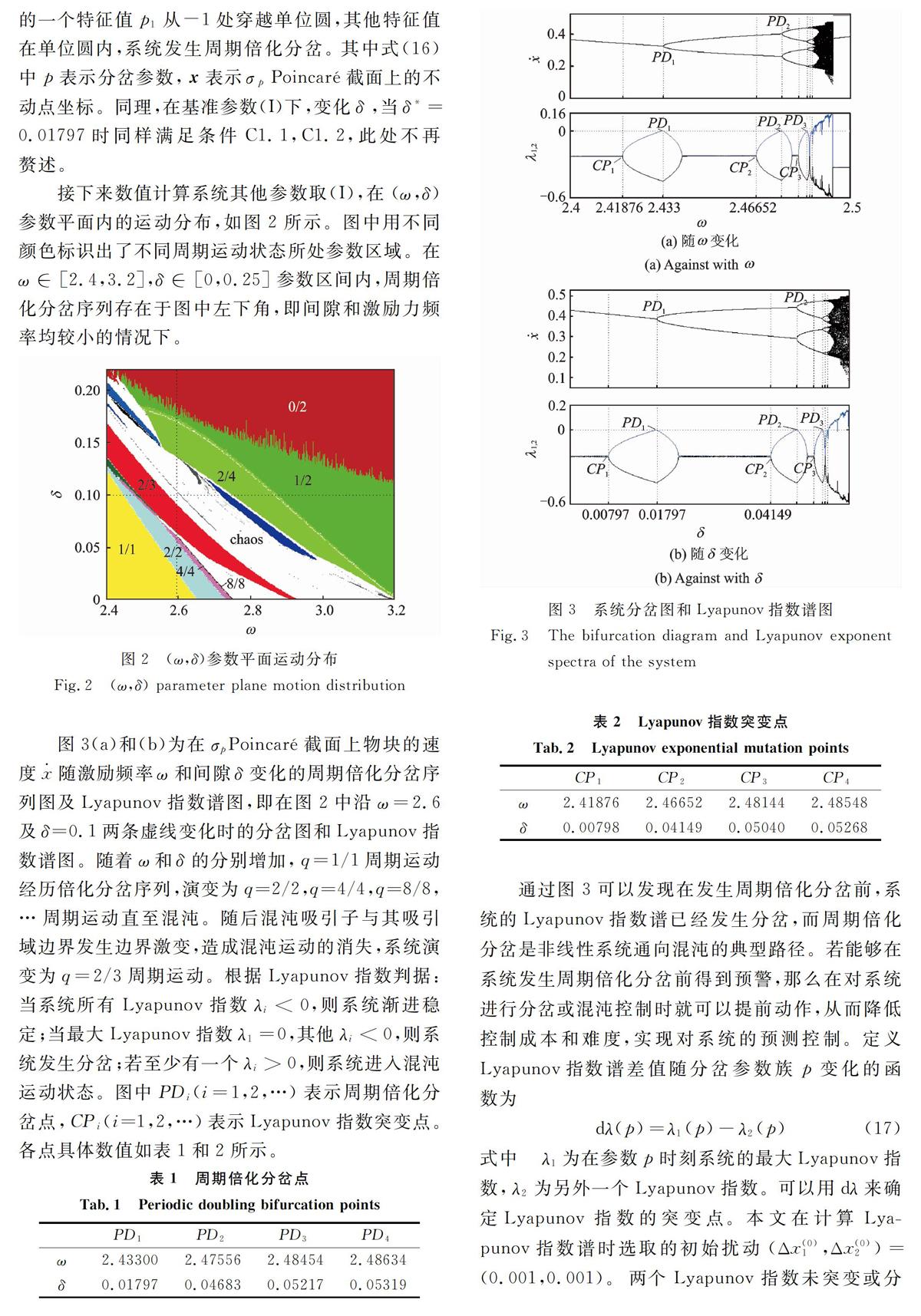
(2) 提出追踪Lyapunov指数谱分岔点来预测周期倍化分岔发生的方法;当周期运动的两个Lyapunov指数的差值dλ小于突变阈值dλCP时,系统保持稳定的周期运动状态;随着系统参数的变化,当dλ逐渐增大到分岔阈值dλPD,即λ1=0时系统开始周期倍化分岔序列,Lyapunov指数突变点的变化倍率为gω≈3.447,gδ≈3.969。
(3) 基于径向基函数神经网络设计了参数反馈分岔控制器,并基于周期倍化分岔点处的最大Lyapunov指数构造适应度函数,即利用Lyapunov指数预测周期倍化分岔的发生,以及判断是否实现了分岔的控制。以引导自适应混合引力搜索算法对控制器的参数进行优选,从而实现周期倍化分岔的控制。
参考文献:
[1] 唐驾时, 符文彬, 钱长照, 等.非线性系统的分岔控制[M]. 北京:科学出版社,2016.
Tang Jia-Shi, Fu Wen-Bin, Qian Chang-Zhao, et al. Bifurcation Control in Nonlinear Systems[M]. Beijing: Science Press, 2016.
[2] Sharan R, Banerjee S. Character of the map for switched dynamical systems for observations on the switching manifold[J]. Physics Letters A, 2008, 372: 4234-4240.
[3] Ma Y, Ing J, Banerjee S, et al. The nature of the normal form map for soft impacting systems[J]. International Journal of Non-Linear Mechanics, 2008, 43(6):504-513.
[4] Ott E, Yorke J A. Border-collision bifurcations: An explanation for observed bifurcation phenomena[J]. Physical Review E, 1994, 49:1073-1076.
[5] Budd C, Dux F. Chattering and related behaviour in impact oscillators[J]. Philosophical Transactions of the Royal Society A, 1994,347:365-389.
[6] Leine R I, Van Campen D H, Van der Vrande B L. Bifurcations in nonlinear discontinuous systems[J]. Nonlinear Dynamics, 2000,(23): 105-164.
[7] Nusse H E, Yorke J A. Border collision bifurcations including 'period two to period three' bifurcation for piecewise smooth systems[J]. Physica D,1992,57(1-2):39-57.
[8] Nusse H E, Yorke J A. Border-collision bifurcations for piecewise smooth one dimensional maps[J]. International Journal of Bifurcation and Chaos, 1995, 5(1):189-207.
[9] Nordmark A B. Non-periodic motion caused by grazing incidence in an impact oscillator[J]. Journal of Sound and Vibration, 1991, 145(2): 279-297.
[10] Di Bernardo M, Budd C J, Champneys A R, et al. Piecewise-Smooth Dynamical Systems: Theory and Applications[M]. London: Springer, 2008.
[11] 金栋平,胡海岩. 碰撞振动与控制[M]. 北京:科学出版社, 2005.
[12] Abed E H, Wang H O, Chen R C. Stabilization of period doubling bifurcations and implications for control of chaos[J]. Physica D, 1994, 70(1-2):154-164.
[13] 唐驾时,欧阳克俭. Logistic模型的倍周期分岔控制[J].物理学报,2006,55(9):4437-4441.
Tang Jia-Shi, Ouyang Ke-Jian. Controlling the period-doubling bifurcation of Logistic model[J]. Acta Physica Sinica, 2006, 55(9): 4437-4441.
[14] 罗晓曙,陈关荣,汪秉宏,等. 状态反馈和参数调整控制离散非线性系统的倍周期分岔和混沌[J]. 物理学报,2003, 52(4): 790-794.
Luo Xiao-Shu, Chen Guan-Rong, Wang Bing-Hong, et al. Control of period-doubling bifurcation and chaos in a discrete nonlinear system by the feedback of states and parameter adjustment[J]. Acta Physica Sinica, 2003, 52(4):790-794.
[15] 王学梅,张 波,丘东元.不连续导电模式DC-DC变换器的倍周期分岔机理研究[J]. 物理学报, 2008, 57(5): 2728-2736.
Wang Xue-Mei, Zhang Bo, Qiu Dong-Yuan. Mechanism of period-doubling bifurcation in DCM DC-DC converter[J]. Acta Physica Sinica, 2008, 57(5):2728-2736.
[16] 姜海波,李 涛,曾小亮,等. 周期脉冲作用下Logistic映射的复杂动力学行为及其分岔分析[J]. 物理学报, 2013, 62(12):120508.
Jiang Hai-Bo, Li Tao, Zeng Xiao-Liang, et al.Bifurcation analysis of complex behavior in the Logistic map via periodic impulsive force[J]. Acta Physica Sinica, 2013, 62(12):120508.
[17] 卫晓娟,李宁洲,张 惠,等.一类含间隙碰撞振动系统混沌运动的RBF神经网络控制[J].振动工程学报,2018,31(2):336-342.
Wei Xiao-juan, Li Ning-zhou, Zhang Hui, et al. Chaos control of a vibro-impact system with clearance based on RBF neural network[J]. Journal of Vibration Engineering, 2018, 31(2):336-342.
[18] 卫晓娟,李宁洲,丁旺才. 一类非光滑系统的无模型自适应混沌控制[J]. 振动工程学报, 2018, 31(6):996-1004.
Wei Xiao-juan, Li Ning-zhou, Ding Wang-cai. Chaos control of a non-smooth system based on model-free adaptive control method[J]. Journal of Vibration Engineering, 2018, 31(6): 996-1004.
[19] 张 惠,褚衍东,丁旺才,等.一类三次方对称离散混沌系统的分岔控制[J]. 物理学报,2013,62(4):040202.
Zhang Hui, Chu Yan-Dong, Ding Wang-Cai, et al. Bifurcation control of a cubic symmetry discrete chaotic system[J]. Acta Physica Sinica, 2013,62(4):040202.
[20] Souza S L T D, Caldas I L. Calculation of Lyapunov exponents in systems with impacts [J]. Chaos, Solitons and Fractals, 2004,(19):569-579.
[21] 金 俐, 陸启韶. 非光滑动力系统Lyapunov指数谱的计算方法[J]. 力学学报,2005,37(1): 40-46.
Jin Li, Lu Qi-shao. A method for calculating the spectrum of Lyapunov exponents of non-smooth dynamical system[J]. Chinese Journal of Theoretical and Applied Mechanics, 2005, 37(1): 40-46.
[22] 刘金琨. 机械系统RBF神经网络控制:设计、分析及MATLAB仿真[M]. 北京:清华大学出版社, 2013.
Liu Jinkun, Radial Basis Function (RBF) Neural Network Control for Mechanical Systems: Design, Analysis and Matlab Simulation[M]. Beijing:Tsinghua University Press, 2013.
Abstract: The paper is devoted to a kind of single-degree-of-freedom non-smooth dynamical system with clearance and pre-compressed springs. The Poincaré mapping of the system is established and the existence condition of periodic motion of the elastic vibro-impact system is derived, and the dynamic distribution in the main bifurcation parameter plane is studied. The stability of the system is analyzed by using Lyapunov exponents, and a method of predicting the occurrence of period doubling bifurcation by tracing the spectral bifurcation points of Lyapunov exponent is proposed. The parameter feedback bifurcation controller is designed on the basis of RBF neural network. The adaptive hybrid gravitational search algorithm (AHGSA) combined with RBF neural network is presented to optimize the parameters in bifurcation controller. To control the period-doubling bifurcations, the fitness function is formulated on the maximum Lyapunov exponent of the corresponding bifurcation points.
Key words: nonlinear vibration; non-smooth dynamical systems; period doubling bifurcation; Poincaré mapping; Lyapunov exponent; RBF neural network
作者簡介: 张 惠(1983-),女,讲师。电话:(0931)4957093;E-mail:zhanghui_nice@163.com
通讯作者: 丁旺才(1964-),男,教授。电话:(0931)4956108;E-mail:Dingwc@mail.lzjtu.cn
