基于滑模与预测控制算法的船舶直线路径跟踪控制
2019-10-21陈志娟2017级研究生党支部书记大连海事大学航海学院
陈志娟 2017级研究生党支部书记 大连海事大学航海学院
一、引言
随着海上交通变的越来越便捷,在控制船舶路径跟踪方面的研究中,文献【1】提出了一种基于重定义输出、解析模型预测控制等技术的路径跟踪控制算法,该算法能够使得欠驱动船舶渐进稳定于给定的曲线和直线参考路径。文献【2】提出了一种鲁棒自适应控制算法,该算法能够使不完全驱动船舶跟踪,并在有干扰下,镇定在一条设定的直线航迹上,跟踪速度较慢。本文根据以上文献内容,以文献【3】中的直线路径跟踪模型为基础,加入外界时变干扰。用滑模控制和预测控制算法使船舶跟踪上直线路径,并减小舵角变化,保护舵机,节约能源。最后进行仿真,验证这个算法的有效性。
二、船舶直线路径模型及控制器设计
利用船舶Nomoto模型,加上非线性项,加入外界未知干扰,船舶直线路径模型表示为:

其中ψ和γ分别表示航向角和转首角速度; T、K和α为船舶模型参数;δ为船舶输入舵角,w(t)是外界干扰信号。
本文采用二级控制,第一级,利用一阶滑模控制得到使y跟踪上yd的期望船首向角ψ*,第二级利用模型预测控制得到使ψ跟踪上角ψ*的舵角δ,进而控制船舶路径跟踪。
文献【3】提出了采用路径的横向偏差和航向角的偏差的线性组合,即下式作为被控对象

其中c为大于零的系数。令ψ*=-c1tanh(c0(y-yd)),ψ*为镇定航迹时的期望船首向角,控制目标就变成了控制船首向角跟踪期望船首向角的航向控制问题。
本文利用模型预测控制,首先参考文献【4】中的欧拉迭代法进行离散和预测状态:
其中Tc是预测时采样时间,w(k+1)是对由风浪引起的外界干扰预测。
构造优化函数

三、直线路径跟踪仿真
本文参考文献【5】在matlab中利用s函数设计控制器和路径系统进行仿真。
仿真:设跟踪路径为正北向yd=0m,初始值为y=100m,φ,γ=0。;控制器参数c0=0.01,c1=pi/9,预测时域Np=26,控制时域Nc=1,风浪等外界干扰w(t)=0.0002sin(3t)。仿真结果如下:
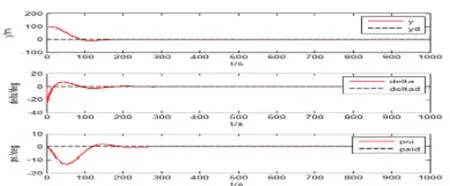
图1 风浪等外界干扰下的船舶直线路径跟踪仿真图
四、 结论
本文在解决船舶路径跟踪控制的基础上,考虑了系统具有欠驱动、不确定性和输入有约束条件的特性。采用滑模与预测控制相结合的控制算法,发挥一阶滑模控制的简捷快速特点,弥补了预测控制由于需要大量预测而带来的迟缓问题;又发挥了预测控制能够有约束的求次优解的特点,解决了一阶滑模难以在有约束下求次优解的问题。二者的结合最终能够使船舶在风浪干扰下稳定和快速的跟踪上直线路径,具有较强的鲁棒性,并且使舵角变化减小,进而对舵机保护,节省能量损耗。
