室内定位技术专利分析
2019-10-15王卓然白红昌
王卓然,白红昌
室内定位技术专利分析
王卓然,白红昌*
(国家知识产权局专利局专利审查协作河南中心,河南 郑州 450018)
随着基于位置的服务(LBS)在移动互联时代的快速发展,传统卫星定位技术已无法满足室内定位的需求。近年来室内定位技术的发展已经形成单节点定位、多节点定位和融合定位的发展方向,并在室内定位和导航的多种场景下得到广泛的应用。针对室内定位领域的专利情况进行分析,具体从专利申请量、专利申请人、技术分支的发展和重点专利分析等方面对室内定位技术进行分析,并在此基础上获得室内定位技术的发展态势,能够便于相关企业和研究机构了解室内定位技术发展的动向。
室内定位;专利分析;Wi-Fi定位;LBS
1 研究背景
随着GPS、北斗等卫星导航技术的发展,利用卫星导航系统为用户提供位置服务已经成为移动互联网时代发展的新主流。然而,越来越多的第三方移动互联服务聚集在商场、写字楼等室内环境为用户提供移动互联服务,而传统的卫星导航由于信号遮蔽的影响,已经不再能够胜任提供位置服务的最佳角色,而为了能够提供室内无缝的位置服务,室内定位技术应运而生[1]。室内定位着眼于为室内环境提供优质而精准的定位服务,根据室内定位算法的类型将室内定位分为单节点室内定位、多节点室内定位和融合室内定位算法[2-3]。本文主要从以上几个方面对室内定位技术进行概述,介绍其所涉及的算法在专利文献库的分布情况,以期得到室内定位技术的专利申请现状和技术发展的脉络。
2 专利申请现状
本节主要基于专利平台分析了室内定位的研究现状。通过分类号(H04W64+ or G01C21+ or G01S5+)+关键词(室内定位;indoor localization),检索关于室内定位的相关专利。截至目前,检索到关于室内定位的申请共630件,其中国内申请量为357件,国外申请量为273件,下面对以上630件专利进行分析。
2.1 专利申请量
室内定位专利的各年度的专利申请量如图1所示。从图1可以看出2012年以后室内定位的专利申请呈现稳步增长的趋势。室内定位技术在国外起步较早,但在2010年前发展较为缓慢。在2012年前后,随着Wi-Fi技术逐渐普及,以Wi-Fi定位技术为主的RSS指纹定位逐渐成为室内定位的主流,并伴随着申请量不断增长,2017年前后,由于部分专利尚未公开,专利申请量有部分下滑。但整体上来看,全球专利申请量目前仍然保持在一个较高的水平,这也在一定程度上反映了室内定位技术的快速发展和较好的应用前景。
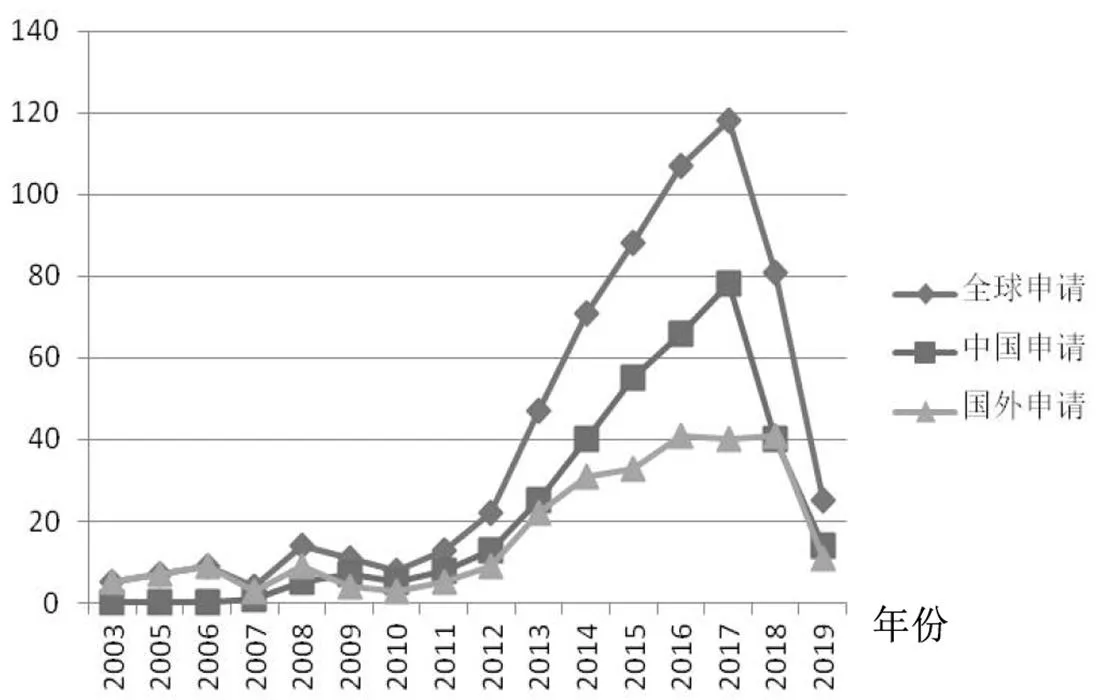
图1 室内定位专利历年申请量
2.2 专利申请人
室内定位专利主要申请人分布如图2所示。从图2可以看出,排名前5的申请人分别为哈尔滨工业大学、高通股份有限公司、重庆邮电大学、华为技术有限公司、电子科技大学,申请量占比分别为28%,17%,10%,10%,10%,占整个申请量的75%。在全球的申请人中,国内申请人主要集中在高校,以华为为代表的国内企业也具备相当的实力,而国外申请人则以高通、英特尔为主的跨国公司为代表。
3 技术路线发展分析
室内定位技术是一个高度依赖网络设备的技术,在2010年前,室内定位技术主要利用芯片进行定位,例如ZigBee、RFID、蓝牙、传感器等;2012年前后,随着Wi-Fi的大规模普及,基于Wi-Fi的指纹定位方法又逐步取代传统的室内定位技术成为主流;2013年前后,随着移动互联网时代的到来,以苹果公司主导的ibeacon定位技术逐步走入大众的视野;2014年前后,各类单节点定位技术均已发展到瓶颈期,研究者更加关注利用卡尔曼滤波、粒子滤波的融合定位的方法。通过对室内定位领域和相关专利文献的分析,确定本文将室内定位研究的技术分支为单节点定位技术、多节点定位技术和融合定位技术。

图2 室内定位专利主要申请人分布
室内定位的各技术分支申请量变化如图3所示。从图3看出,多节点定位的申请总量位于第一,其次是融合定位,最后是单节点定位。由于惯性器件、MEMS传感器的龙头生产企业主要在国外,因此国外关于单节点定位技术的申请量要略优于国内,但随着Wi-Fi技术的发展,以RSS为主的指纹定位逐步走在前列,而国内申请人则是处于领先地位。

图3 室内定位各技术分支申请量变化曲线
各技术分支历年申请总量如图4所示。从图4可以看出单节点定位技术起步最早,而单节点定位技术由于技术发展的限制和性能指标进入发展的瓶颈,2009年以后已经逐渐下滑,多节点定位技术的申请总量在2012年以后一直保持最多,而融合定位技术在2013年前后得到快速发展,其申请量也在逐步增加。
3.1 单节点定位技术
单节点定位技术主要利用传感器实现目标的相对定位,常用的传感器包括MEMS和IMU。与传统的多节点定位技术(例如ZigBee、蓝牙、RFID、ibeacon)相比,它可以独立完成自身的姿态解算以实现自身的相对定位,目前已经在机器人领域大规模使用。专利US6853947B1通过利用IMU的加速度计、三轴磁传感器、速度传感器来进行位置姿态的估计,但是IMU的精度随着时间的推移逐渐降低,这主要是由于陀螺仪存在常值漂移。专利CN200610114096通过在IMU中安装一个附加陀螺作为监控陀螺,实现对其他导航陀螺的输入轴的正反向精确校准,从而减小惯性导航系统的漂移误差。此外针对陀螺仪的常值漂移的抑制方法还包括专利CN2013106567410公开的利用卡尔曼滤波器对漂移误差进行估计。虽然惯性导航单元可以提供高精度的定位结果,但由于误差的积累,惯性导航的可用性随着时间的推移会逐渐降低,虽然研究人员已经研究了一系列优化惯性导航累计误差的方法,但是由于其成本昂贵、校准时间长等缺点,其应用多集中在机器人领域和军事领域。
三个室内定位领域重要专利年份及技术分支如图5所示,本文接下来对三个技术分支的重点专利进行分析。

图4 各技术分支历年申请总量

图5 室内定位领域技术发展路线
3.2 多节点定位技术
多节点定位技术常基于信号接收强度RSS来进行位置估计,它与单节点定位区别在于它的定位需要依赖外部信息,一般都是利用RSS建立的指纹库来进行位置的估计。指纹定位包括离线阶段和在线阶段,离线阶段是在待定位的区域内预先布置一定数量的采样点,利用移动设备采集接收来自不同采样点的信号强度,最终建立一个信号强度与物理位置映射的指纹数据库;在线阶段则是利用实际接收的信号强度与指纹库进行匹配,推算出具有最大似然概率的估计位置。目前采用信号强度定位的方式包括ZigBee、RFID、蓝牙(ibeacon)、Wi-Fi等。
蓝牙ibeacon定位技术基于射频信号强度随距离衰减的模型来计算距离,它是由苹果公司主导的室内定位技术,ibeacon技术的主要优点是利用了低功耗的蓝牙技术,缺点是射频信号易受到外界环境的干扰。诺基亚公司是最早着手研发蓝牙定位的国外公司之一,其专利EP10857771A通过从至少三根天线接收蓝牙数据分组来确定终端相对位置,解决了传统的GPS不可用的问题,而其另一篇专利EP11876544A使用了最早的ibeacon设备来降低功耗。然而,受限于ibeacon信号的RSSI受无线传播环境的影响,其RSSI波动范围较大,为此,专利CN201510587515公开了一种利用卡尔曼滤波器对ibeacon信号进行处理,控制了其动态范围,极大提高了定位精度。RFID定位技术是通过一组固定的阅读器读取目标RFID标签的特征信息,同样可以采用近邻法、多边定位法、接收信号强度等方法确定标签所在位置,其优点在于RFID成本低、作用范围广,但缺点在于感应距离较短,专利CN200810027885通过搭建RFID阅读器,标签并利用RSSI进行位置估计。另外,由于射频干扰的问题,RFID的定位精度也容易受到影响,专利CN201101014745通过每隔一段时间采集数据,减少了环境因素的影响,再通过构造虚拟标签来实现定位,消除了高密度标签所带来的影响。
蓝牙和RFID受限于节点布置普及率不足的影响,目前仍未在商业中得到大规模的推广,而考虑室内定位的实际需求,Wi-Fi作为移动互联网时代的强有力推动者,在室内定位也逐渐受到研究人员的追捧。Wi-Fi定位的普及在于Wi-Fi设备的普及,Wi-Fi定位包括离线阶段和在线阶段,离线阶段为采集AP的RSSI并建立指纹库,在线阶段则是基于实际接收信号强度RSSI与指纹库匹配进行位置估计。CN200910169315是较早使用Wi-Fi定位的专利申请,它通过建立AP的RSSI数据库,并使用RSSI与数据库匹配进行位置估计。与传统的无线信号在自由空间的传播模型相似,Wi-Fi信号受室内多径效应、环境噪声等外界环境因素的影响,使得采集的信号强度分布规律不明显,导致系统训练误差的增加和映射能力的下降,因此采用传统RSS训练算法所建立的指纹库在定位测试中效果不佳,为此,专利CN201010032481通过对初始RSS进行聚类以排除自由空间环境对Wi-Fi信号的影响,从而提高系统的定位精度和环境适应性。另外,在基于指纹图的室内定位技术中,增加AP的密度有助于提高定位精度,但AP数量过大会导致定位计算延时过长以及能耗增加。在室内定位系统中,AP的选择策略有助于减少定位误差,减小客户端与服务器端的通信代价。专利CN201510267317通过将大量AP进行模糊聚类,并由此构建优化模型选择最优的AP组,使得所选AP组定位精度损失最小,同时也可以缩小不同的定位区域之间的定位精度差距。专利CN201610038579通过对AP特征进行细粒度分析,综合考虑AP信号的梯度特征、稳定性、方向特征,并通过模拟退火算法求出最高精度的最优解,有效删去了无效的候选AP,可有效节约测量成本。CN201710749844通过SDN控制器接收RSSI值,计算定位区域与各AP的相关性,选择相关性大的AP,提高了定位精度,减少了存储开销。此外,当AP数目增加时,指纹数据库就变成了高维数据。为减轻处理高维数据的负担,降维算法是有效的解决方法之一。专利CN201310750528和CN201510020485均是解决Wi-Fi定位中降维问题,从而保证定位的实时性。
3.3 融合定位技术
由于单节点定位和多节点定位均是采用单一模式的定位思想,因此其在误差估计抑制方面受到的影响很多,而为了取得更佳的定位效果,研究人员开始研究融合定位技术。融合定位技术是指利用多种定位技术并采用滤波的思想对误差进行修正,以获得更好的位置估计精度,常用的滤波算法包括卡尔曼滤波、粒子滤波、增强卡尔曼滤波等。根据融合的类型,可以将融合技术分为多元传感器融合定位、卫星融合辅助定位和Wi-Fi融合辅助定位等。多元传感器融合定位是指利用多种传感器来进行耦合定位,专利EP12786667A通过获取加速度计和陀螺仪的数据,并采用了粒子滤波算法对位置进行估计,极大地提高了定位的精度。专利CN201510954979通过多传感器融合实现了对目标的三维定位,并通过滤波算法将不同传感器的噪声滤除,提高了定位的精度。Wi-Fi辅助室内融合定位技术是指主要利用Wi-Fi的融合定位算法,由于Wi-Fi在商场和写字楼的大规模普及,基于Wi-Fi的辅助室内融合定位算法具有较广泛的应用,例如Wi-Fi地磁融合、Wi-Fi-mems融合、Wi-Fi传感器融合、Wi-Fi蓝牙融合等。专利CN201410843968公开了一种利用Wi-Fi结合地磁的融合定位算法,不仅克服了Wi-Fi定位受室内环境的影响,也减弱了地磁定位的不稳定性,从而实现了二者定位缺陷的互补。相比于地磁定位,mems定位更能克服室内环境对信号的影响,因此其更适合于与Wi-Fi进行融合定位,例如专利US20170536615A通过将Wi-Fi与MEMS数据融合,并且采用EKF算法,有效地提高了定位的精度。专利CN201510219651通过融合Wi-Fi和惯性器件的数据并通过粒子滤波算法提高了室内定位的精度。另外,将基于双重RSS指纹定位算法应用到室内定位中也受到广泛关注,专利CN201710380398通过将Wi-Fi和蓝牙的RSS通过贝叶斯估计来测算所估计的位置,减弱了高斯噪声对信号的影响。
4 总结
随着网络技术的快速发展,高度依赖网络技术发展的室内定位技术也不断更新和突破。通过对室内定位领域专利的分析,更具体地通过分析室内定位技术各年度的申请情况、申请人情况及各技术分支的申请情况以及重点专利的分析,目前室内定位的主流趋势是以基于RSS的Wi-Fi定位为主,并且融合定位也逐步凸显其优势。然而,AP布置以及数据降维依然是影响Wi-Fi定位的定位精度和实时性的重要因素,而随着融合定位优势的凸显,未来室内定位的发展方向必将是以Wi-Fi定位为主导的融合定位。目前,国内对于该领域的研究主要集中于高校和研究所,一些跨国企业已经实现了室内定位的商用,因此国内企业仍需进一步提升对室内定位领域的技术研发,提前做好专利布局,最终实现室内定位的产业化。
[1]赖金阳.基于RSS的WLAN室内定位算法分析与应用研究[D]. 广州:暨南大学,2017.
[2]王海榕.基于BLE的大型商场室内定位导航的设计与实现[D].杭州:浙江工业大学,2015.
[3]AXEL K.Location-based services:fundamentals and operation[M].New York:John Wiely&Sons,2005.
TN925
A
10.15913/j.cnki.kjycx.2019.18.023
2095-6835(2019)18-0060-03
王卓然(1990—),男,河南开封人,硕士研究生,研究实习员,研究方向为信号处理、移动通信。白红昌(1990—),男,河南商丘人,硕士研究生,研究实习员,研究方向为移动通信。
*对本文贡献等同于第一作者
〔编辑:严丽琴〕
