机械制图中利用坐标及箭头判断方位和可见性
2019-10-14
(惠州工程职业学院 广东 惠州 516000)
引用
机械制图是一本工程类的专业基础课,这么课是一门工程界的技术语言。在这么课中间正投影法,用二维平面表达三位空间形体的内容是这门课的一个基本点。在投影关系中判断一个物体的方位。而且有些点和线在投影过程中会重合,有些点和线会被前面物体遮挡。在绘制三视图时要用判断其可见性和相对位置。我介绍一个简单易懂的判断方法来帮助我们更好的掌握这部分的内容。
一、如何利用坐标和箭头在三视图中判定方位
我们之前都是通过下面的方法来判断物体方位的投影规律的。物体有上、下、左、右、前、后六个方位,左右为长、上下为高、前后为宽。当物体的投射方向确定后,其六个方位也确定下来主视图反映物体的上、下和左、右方位;俯视图反映物体的左、右和前、后方位;左视图反映物体的上、下和前、后方位。如图1所示。这个图虽然也比较简单,但是要把整张图都记住还是有一定的难度。尤其对于空间想象能力稍微差一点的学生来说。

图1
我们采用结合坐标和箭头的方法来记住这张图所表达的内容就会使得记忆和应用的难度降低。具体方法如下:
1.前提还是我们所投影的规律还是按照我国现行规定的投影面的。
2.投影的坐标系中还是有三个坐标轴。分别是X坐标轴,Y坐标轴和Z坐标轴。每个坐标轴所代表的就是一对方位。比如:X坐标轴就是用来判断左右方位的。也就是说我们如果要判断左右方位就看X坐标轴就可以了。同样,Y坐标轴就是用来判断前后方位的,如果要判断前后方位看Y坐标轴就可以了,Z坐标轴就是用来判断左右方位的。也就是说我们如果要判断左右方位就看Z坐标轴就可以了。
3.具体是左还是右、是前还是后、是上还是下就通过箭头来判断,X轴的箭头方向是左,背向箭头方向是右;Y轴的箭头方向是前,背向箭头方向是后;Z轴的箭头方向是上,背向箭头方向是下;
简单总结就是:先看坐标:X轴决定左右,Y轴决定前后,Z轴决定左右。再看箭头X的箭头方向是左,反之为右,Y的箭头方向是前,反之为后;Z的箭头方向是上,反之为下。
二、如何利用坐标和箭头在三视图中判定相对位置
常规的判断位置的方法也是通过一张图来判断的。具体如图2所示。
图虽然简单,但要全部记住对于初学者来说,尤其是对那些空间想象能力相对差一点的学生来说难度就大了。那有没有一些口诀之类的简单的判断相对位置的方法呢?
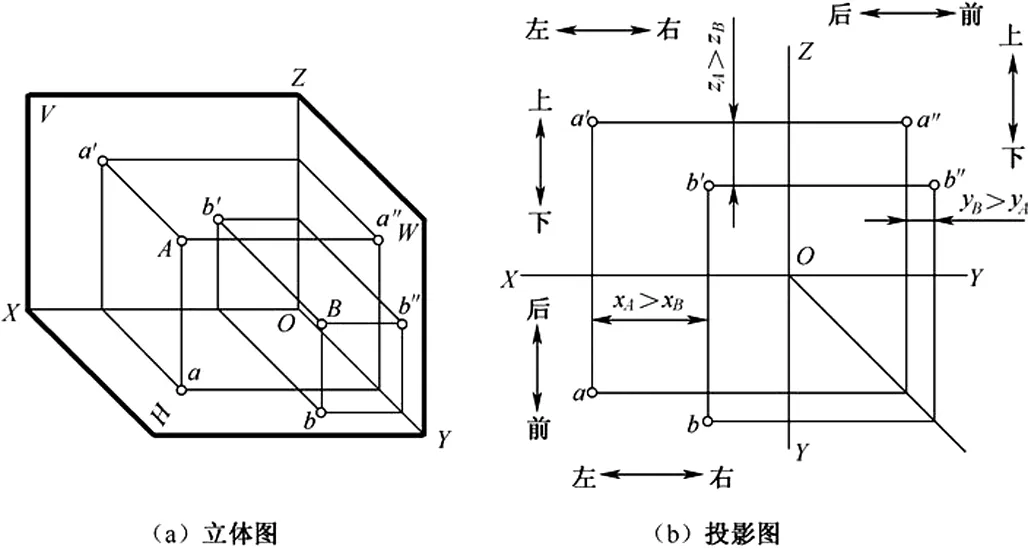
图2
我们还是可以利用上面的方法来判断两个点之间的相对位置:先看坐标:X轴决定左右,Y轴决定前后,Z轴决定左右。再看箭头X的箭头方向是左,反之为右,Y的箭头方向是前,反之为后;Z的箭头方向是上,反之为下。
具体所,一个点的X的坐标比另外一个点X坐标大,说明这个点在另外一个点的左边,也即是说靠近X轴箭头的点在左边;一个点的Y的坐标比另外一个点Y坐标大,说明这个点在另外一个点的前边,也即是说靠近Y轴箭头的点在前边;一个点的Z的坐标比另外一个点Z坐标大,说明这个点在另外一个点的上边,也即是说靠近Z轴箭头的点在上边;反之亦然。
简单总结:靠近X轴箭头的点在左边;靠近Y轴箭头的点在前边;靠近Z轴箭头的点在上边。
三、如何利用坐标和箭头在三视图中判定可见性
之前总结相对简单的可见性判断的方法是:对H面的重影点从上向下观察,z坐标值较大者为可见;对V面的重影点从前向后观察,y坐标值较大者为可见;对W面的重影点从左向右观察,x坐标值较大者为可见。
我们总结成更简单的可见性的方法是看坐标轴箭头的方法:靠近坐标轴箭头的为可见,背离坐标轴箭头的为不可见。这样就大大减少了判断的时间和记忆内容。
四、总结
我们利用坐标和箭头在三视图中的应用,使得学习三视图中判断方位;三视图中判断相对位置;三视图中判定可见性的内容简单化了。具体总结如下:
判断方位:先看坐标:X轴决定左右,Y轴决定前后,Z轴决定左右。再看箭头X的箭头方向是左,反之为右,Y的箭头方向是前,反之为后;Z的箭头方向是上,反之为下。
判断相对位置:靠近X轴箭头的点在左边;靠近Y轴箭头的点在前边;靠近Z轴箭头的点在上边。
判定可见性:靠近坐标轴箭头的为可见,背离坐标轴箭头的为不可见。
