自动驾驶决策与控制方法专利技术分析
2019-10-14戴自立
戴自立
(国家知识产权局专利局专利审查协作湖北中心,武汉 430205)
自动驾驶,是指搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与人、车、路、云端等智能信息交换、共享,具备复杂环境感知、智能决策、协同控制等功能,可实现安全、高效、舒适、节能行驶,并最终实现替代人对新一代汽车进行操作。
自动驾驶的决策与控制方法包括传统的基于if-then 逻辑实现的决策与控制方法以及基于机器学习实现的决策与控制方法,本文将前者称为传统决策与控制方法,将后者称为基于机器学习的决策与控制方法。本文主要从专利申请趋势、技术发展路线、关键技术分析、专利运营策略等方面,对传统决策与控制方法与基于机器学习的决策与控制方法进行专利分析。
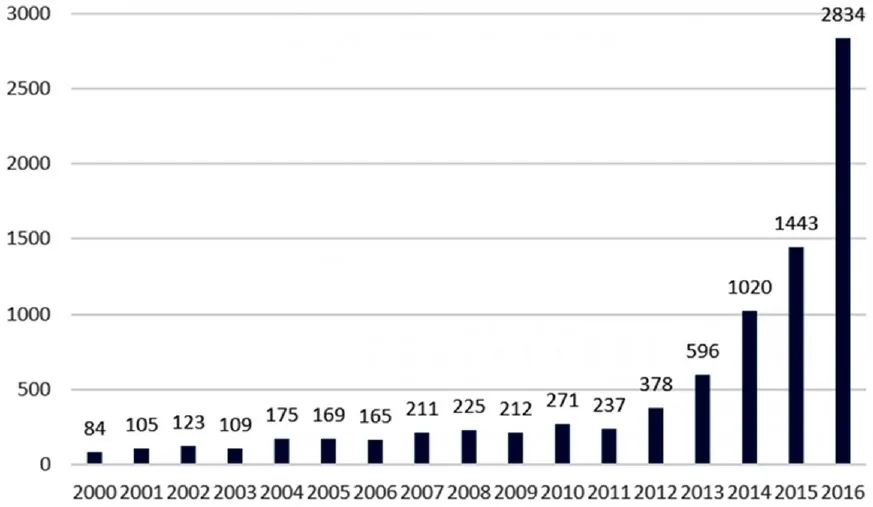
1 传统决策与控制方法专利申请趋势

上图是涉及传统决策与控制方法专利申请在全球范围内历年申请量的年代分布图,可以看出,传统决策与控制方法的申请量自2000年以来持续稳定增长,并在2016年达到顶峰。
2 传统决策与控制方法专利申请区域
从技术来源国来看,传统决策与控制方法专利申请大多由日德美三个国家的公司掌控,占全球专利申请量的近70%,尤其是日本,掌握了全球超过三分之一的专利技术,而中国的原创专利技术仅占11%左右。
在专利布局目标国方面,传统决策与控制方法专利申请主要布局在日美中德四个国家,其中日本为全球最大的专利申请目标国,在日本的专利数量申请占全球28%,在中国的专利申请数量占全球的17%,国外企业相对比较注重在中国的专利布局。日本在2010年以前申请量较大,但从2010年开始,在中国和美国的专利申请呈现大幅增长,在2015年前后申请量超过日本。
3 传统决策与控制方法专利申请技术分支
传统决策与控制方法包括泊车辅助、车道保持、巡航控制、队列行驶、轨迹规划、碰撞避免、全局路径规划等技术分支。日本在各分支均有覆盖,尤其在碰撞避免分支申请量非常大,美国则在全局路径规划、轨迹规划领域有所侧重,德国更多关注泊车辅助技术,中国在全局路径规划研究较多。碰撞避免技术是传统决策与控制方法中申请量最大的技术分支,该项技术是决策与控制方法的研究重点,明显高于其他技术分支的申请量。
4 传统决策与控制方法专利申请人态势
传统决策与控制方法申请量前十的申请人依次为丰田、博世、日产、电装、大众、本田、现代、三菱、福特、戴姆勒。前十申请人以整车厂商、零配件厂商为主。有五家日本企业进行前十,其余为德国、美国、韩国企业,排名前十的申请人中无中国企业。丰田在车道保持、巡航控制、轨迹规划、碰撞避免等技术分支的申请量具有较大的优势,博世在泊车辆辅助、全局路径规划方面占据优势,大众则在队列行驶技术方面领先。
5 传统决策与控制方法国内专利申请态势
数据显示,在2005年以前,国内只有少量的传统决策与控制方法相关的专利申请,从2005年国内申请量开始激增,这与国内汽车产业近年的发展趋势一致。在中国申请量排名前十的企业中,排名前列的均为国外企业,且在申请量上具有绝对优势,排名前10位中有5家日本企业,2家国内企业,但是国内企业的总申请量不及丰田这一家公司在华的申请量。可见,国内企业在传统决策与控制方法中技术储备与国外相差巨大。虽然近年来国内传统决策与控制方法专利申请趋势激增,也有较多的创新主体参与到传统决策与控制方法的研究与生产制造中,但是和丰田、博世等企业数以千计、万计的专利申请量相比,我国企业在该领域的专利申请体量严重不足,专利布局有待进一步加强。
6 基于机器学习的决策与控制方法专利申请趋势
上图是涉及基于机器学习的决策与控制方法专利申请在全球范围内历年申请量的年代分布图,可以看出,在2000年之前只有少数申请,2000-2011年期间由于自动驾驶的发展,基于机器学习的决策算法的专利数量稳步上升,2011年之后由于深度学习等人工智能算法的多元发展以及自动驾驶的迅猛发展,各个公司开始加大专利布局,专利申请量呈现迅猛增长的趋势,且持续至今。
自2011年起,基于机器学习的决策与控制方法专利申请量的增长速度远高于传统决策与控制方法专利申请量的增长速度。
7 基于机器学习的决策与控制方法专利申请区域
从技术来源国来看,美国以5967件专利稳居第一,位居第二的为中国,排名第三的为日本,美国占有量是中国的2倍有余,可见当前中国的原创能力相比美国还较弱。
在技术来源国历年申请趋势方面,美国依旧维持强势,日本积累深厚但近年来增速放缓。中国在2013年之后原创技术快速增加,已超过日本,但与美国仍有较大差距。
在专利布局目标国方面,从专利申请目标国分布来看,美国优势依然明显,以4758件排名第一,中国排名第二,申请量为3708件。
从专利申请目标国的历年申请量来看,中美两国市场一直以来受到高度重视。可以看出,专利申请目标国的趋势和全球汽车市场的发展趋势基本一致。
8 基于机器学习的决策与控制方法专利申请技术分支
基于机器学习的决策与控制方法包括强化学习、无监督学习、有监督学习等技术分支。无监督学习算法以10173件排在第一位,其中尤其以聚类算法最突出,这与在自动驾驶中涉及的关键技术目标识别和检测多采用聚类算法实现有关。各国均较重视无监督学习技术分支,美国在3个技术分支上均具备优势,而中国在各分支的布局仅次于美国。从2016年开始,强化学习、无监督学习、有监督学习算法相关申请量均快速增长,其中强化学习中的深度强化学习技术申请量增幅较大,可见全球自动驾驶研究都加大了深度强化学习技术的研究。
9 基于机器学习的决策与控制方法专利申请人态势
基于机器学习的决策与控制方法申请量前十的申请人包括丰田、福特、通用、谷歌、本田、三星、大众、高通、LG、here global,主要被美国和日本的传统车企巨头和高科技公司所占据,而中国没有一家企业进入前十,中国企业竞争力有待加强。
国内前十的申请人中,百度和滴滴两家企业申请量最大,其余均是各大院校和科研院所,可见目前基于机器学习的决策算法在科研院校的研究居多,企业在此方面的专利布局还有待加强。
10 结束语
2018,美国有6家企业发布自动驾驶安全报告,其中包括谷歌、通用、福特、英伟达等自动驾驶的行业领先者,报告显示,大部分企业采用基于机器学习的决策与控制方法。从专利申请增长速度来看,基于机器学习的决策与控制方法的申请量增长速度也远高于传统决策与控制方法的增长速度。基于机器学习的决策与控制方法具有较好的发展前景。在基于机器学习的决策与控制方法领域国内前十申请人中包括六所大学及科研院所。面对可能存在的专利风险,国内整车厂商、零配件厂商可以加强与国内大学的产学研合作,提高专利申请量,加强成果转化,加强基于机器学习的决策与控制方法领域、车路协同领域的技术研发,及早进行专利布局。
