自适应多点悬挂重力补偿系统研究
2019-10-11董龙雷严亚亚孙海亮
董龙雷,严亚亚,任 凯,孙海亮
(1.西安交通大学航天航空学院,西安 710049; (2.北京宇航系统工程研究所,北京 100076)
0 引言
航天器离开地球时,将面临许多不利因素,如微重力、微流星体、电磁辐射和空间碎片,其中重力变化的影响最为突出[1]。由于地球重力场与太空重力场存在显著差异,因此航天器在地面重力场完成有效测试之后升入太空,太空重力场并不一定满足航天器各个部件的工作环境需求,从而影响航天器的工作性能[2];另一方面,针对太空微重力环境设计的航天器结构参数,在地面重力场中进行试验时地面重力可能会对航天器带来损伤。因此,在航天器发射之前,在地面试验中做好零重力或微重力的模拟实验是十分重要的。
重力补偿系统是通过被动平衡或主动控制的方法调整补偿力以平衡重力,是模拟微重力环境的一种方法。目前,重力补偿方法主要有:在微重力塔中执行自由落体运动,产生失重状态,利用重力加速度补偿重力,模拟微重力实验环境的落塔法,该方法成本高,受航天器尺寸限制,通用性较差[3];同时还有利用高压气流制造升力补偿重力的气浮法,该方法不仅在三维空间的微重力环境模拟难以实现,而且垂直运动往往依赖于其他方法,应用性差[4]。而采用绳索机构悬挂补偿对象,通过绳索的张力平衡物体的重力,从而产生补偿对象在微重力模拟环境中效果的悬挂法,以其成本低、精度高、易于实现等优点被广泛应用于航天天线、空间可展开结构。
采用悬挂法对航天天线进行重力补偿时,由于航天天线是柔性体,因此在补偿点比较少的情况下,导致每个补偿点受到的力较大,补偿点之间跨度大[5],从而会在未补偿点产生大挠度变形,在补偿点会产生大弯曲变形,进而影响天线的展开角度,甚至造成补偿对象的破坏。目前,解决上述问题最有效的方法就是增加补偿点的数量即采用多点悬挂重力补偿法,多点重力补偿是一个过约束问题,各补偿点受到的力不尽相同,可能有多种情况存在,而且存在重力补偿的多点耦合问题[6-7]。同时该方法多为被动式控制,补偿力不可调整;更重要的是悬挂重力补偿系统通过电机的主动控制来模拟微重力环境,传动系统的摩擦、电机齿轮的间隙、负载偏心力矩等因素会造成严重的非线性,难以建立准确的数学模型,导致传统的PID控制算法不能很好地解决上述问题[8],因此亟需设计一套可以自动辨识模型参数、进行自适应控制方法。
综上所述,针对现有控制方法存在的明显不足,本文研究一种多点补偿、主动式控制、采用自适应算法的重力补偿系统,来解决以航天天线为代表的大型柔性体地面实验的微重力模拟,同时提高重力补偿系统的鲁棒性与泛用性。
1 系统总体方案设计
本文以大型桁架式航天天线为主要被控对象,其模型如图1所示。

图1 大型桁架式航天天线模型Fig.1 Large truss space antenna model
该航天天线通过4种铝合金杆件组装成直径L=2m,高度H=0.5m的桁架结构,总质量为140kg。杆件之间通过方块连接件连接,不仅保证了天线的强度,同时可提供与重力补偿设备连接的接口。针对上述天线结构设计了一种多点悬挂的重力补偿系统其结构,如图2所示。

(a)刚性支架

(b) 系统结构图

(c) 补偿点布局图2重力补偿系统结构图Fig.2 Gravity compensation system structure diagram
实际试验时刚性支架固定在地面上,航天天线通过8条绳索悬挂于刚性支架的4条悬臂末端,每条绳索上安装了拉力传感器,实时监测绳子上的拉力,4个电机安装在刚性支架的4个悬臂上;通过控制系统使得电机转动令绳索产生的补偿力与航天天线的重力大小相等,控制系统流程图如图3所示。

图3 控制系统信号流图Fig.3 Control system signal flow diagram
整个系统运行过程中,在上位机进行控制算法的编写,经过仿真测试之后,进行编译预处理,送入下位机dSPACE中进行控制。控制时首先通过传感器收集系统补偿力信息,经过信号调理之后送入下位机中。下位机利用控制算法进行信息处理,向电机驱动器发出控制信号。驱动器通过控制电机旋转改变补偿力的大小,使各补偿力同时达到目标值。
2 控制算法
2.1 控制系统建模及系统辨识
本文采用自适应多点控制方法,能够自动地对补偿对象进行系统辨识,从而获得精确的数学模型,根据其数学模型自动对系统进行控制器的设计以及控制参数的修改,同时调整所有补偿力,使得所有补偿点的补偿力最终达到目标值。
离散时间随机线性模型是自适应控制领域应用最为广泛的模型[9],采用该模型对控制系统进行建模,该模型可用式(1)的差分方程来表示
A(q-1)y(k)=q-dB(q-1)u(k)+C(q-1)ε(k)
(1)
式中,
A(q-1)=1+a1q-1+…+anaq-na
B(q-1)=b0+b1q-1+…+bnbq-nb
C(q-1)=1+c1q-1+…+cncq-nc
q-n为n单位的时延;q-ny(k)=y(k-n);y(k)为当前系统输出,即绳索的张力;y(k-n) 为向前n时刻的系统输出;u(k)为当前系统的输入,本系统中为电机的位移;u(k-n)为向前时刻的系统输入;ε(k)为均值为零的白噪声序列;a1,…,ana、b0,b1,…,bnb、c1,…,cnc为描述系统特征的待定参数;na、nb、nc为人工选择的常数。
式(1)中,为简化推导过程,忽略干扰项,分离变量并整理得
y(k)=w(k)Tx(k)
(2)
令
w(k)=[a1,a2,…,ana,b1,b2,…,bnb]T
x(k)=[-y(k-1),-y(k-2),…,-y(k-na),
u(k-d),u(k-d-1),…,u(k-d-nb)]T
式(2)为最小均方算法(简称LMS算法)的系统模型,x(k)由历史数据组成,均为已知;w(k)为第k次辨识权系数的估计值,令y*(k)表示期望的系统输出,则系统误差e(k)为
e(k)=d(k)-y*(k)
(3)

(4)
则权值w的迭代公式为
w(k+1)=w(k)+2ue(k)x(k)
(5)
式(5)中,u为收敛因子,也叫学习速率,学习速率u的值决定了系统的收敛性,及收敛的快慢。本文采用的自适应学习速率,使得u可以在一定范围内随系统误差改变,在保证系统稳态精度和稳定性的同时,具有快速跟踪的能力。通过训练w不断逼近最优值,最终获得系统的控制模型。
2.2 控制设计
在系统辨识获得系统模型后,就可以根据系统模型进行控制器的设计。针对该算法的悬挂重力补偿多点控制主要有两个方案。第一种是4个点独立控制;由于多点耦合的存在,4个点之间并不独立[10],必须对多拉力传感器的信息进行融合与处理。本文采用第二种方案,其思想是使用一个控制器联合控制,同时采用基于LMS算法的控制器。LMS算法本质上也是一种自学习的模型,能够其根据样本的相关性,通过权值表述在融合的结构中,通过随机梯度下降法来在线逼近不确定的推理机制,然后根据这一机制进行融合和在线学习[11]。采用LMS算法对控制器的理想模型进行估计,进行控制器的设计,来解决多点耦合的问题。具体结构如图4所示。
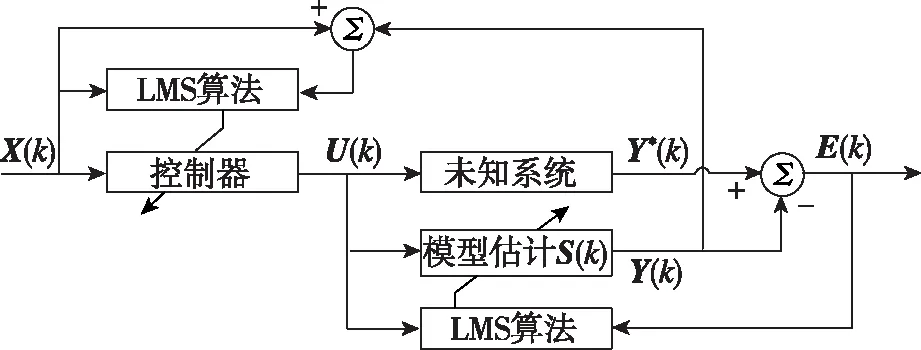
图4 控制器设计Fig.4 Controller design
LMS算法设计的控制器模型为
U(k)=W(k)X(k)
(6)
式中,

U(k)是k时刻的控制器输出,W(k)是控制器模型待辨识参数k时刻的估计值,X(k)是已知的控制器设计参考信号。
k时刻系统输出Y(k)为
Y(k)=S(k)U(k)
(7)
式中,S(k)是k时刻辨识获得的重力补偿系统模型。
系统误差ξ(k)为
ξ(k)=Y*(k)-Y(k)=Y*(k)-S(k)U(k)
(8)
取系统误差的均方值作为目标函数J
J=E{ξ2(k)}
(9)
(10)
根据上文系统辨识的结果S(k),并且已知X(k),则控制器模型的权系数更新公式为
W(k+1)=W(k)+2uξ(k)S(k)X(k)
(11)
下一时刻控制器的设计过程为
U(k+1)=W(k+1)X(k)
(12)
通过LMS算法对理想控制器模型的估计,完成了控制器的设计过程。
3 多点补偿联合控制算法仿真
3.1 联合仿真平台搭建
控制性能的好坏还受算法实现过程中参数选择的影响,因此采用Simulink控制程序与Adams动力学模型的联合仿真方法,对算法参数进行选择,并验证系统的有效性。建立联合仿真平台如图5所示。
学习速率变化时,下一时刻学习速率大小受当前时刻学习速率μ(k)影响,除此之外还受到当前时刻输出误差e(k)的影响,因此学习速率的更新公式为
utemp(k+1)=αu(k)+γe2(k)
(13)
学习过程中过大的学习速率会导致过大的均方误差,学习结果不收敛;过小的学习速率会导致学习时间长,计算量大;为解决两者的矛盾,应对学习速率的大小加以限制,保证其在适当的范围内自动调整,则
(14)
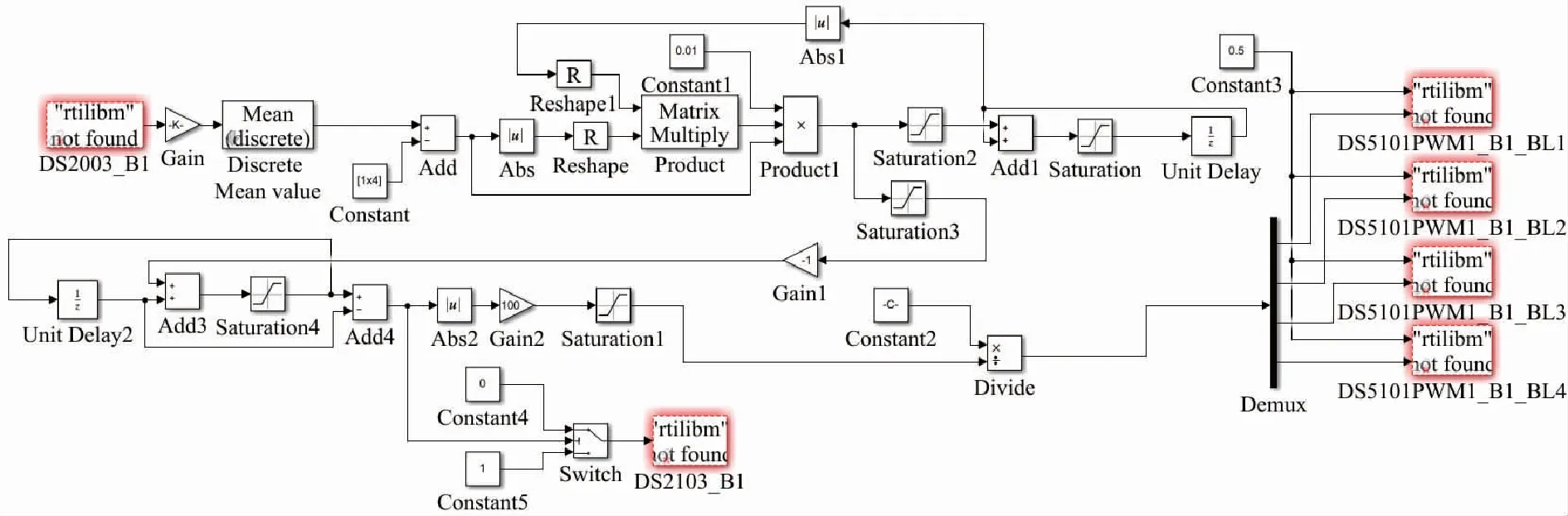
图5 Simulink与Adams的联合仿真Fig.5 Simulink and Adams combined simulation
式中,α是常系数,0<α<1;γ是常系数,γ>0;umax是学习速率的上界;umin是学习速率的下界;umax、umin均为常数,在保证均方误差在允许范围内,通常umax选为固定步长LMS算法的稳定性条件的临界学习速率,umin根据稳态条件下的超调和收敛速度的要求做出选择,由仿真结果确定学习速率的上下界。
对于该算法,大的误差可以使步长增大,从而具有快速的跟踪能力;误差减小,步长随之减小,以获得较小的超调与稳态误差。参数选择中,通常α的大小接近1,本文选择为0.9。
3.2 控制算法仿真结果
重力补偿系统仅仅完成补偿力的初始化还远远不够,在实际使用中,需要在补偿对象上进行相关实验操作,比如结构研究中在航天天线上进行模态实验,需要在天线上进行周期性的冲击来观察响应,因此本系统不仅需要能够对补偿力主动调整,系统还需要在复杂的实验情况下完成对环境的辨识,最终保持绳索的拉力稳定在理想值。仿真中选择幅值为10N、频率为0.5Hz、沿绳索方向竖直向上的正弦周期信号,模拟周期干扰环境作用在航天天线的节点。为保证能够清楚地看出周期变化的影响,仿真时间设置为3s,仿真结果如图6、图7所示。
由图6可以看出,基于LMS算法的权值在经过短暂的学习后快速收敛并稳定在理想值,收敛时间约为0.2s。由图7可知,输出位移随干扰周期性变化,说明算法能够精确地辨识系统模型,驱动器可以跟踪外界变化产生响应,使系统补偿力稳定在理想值。
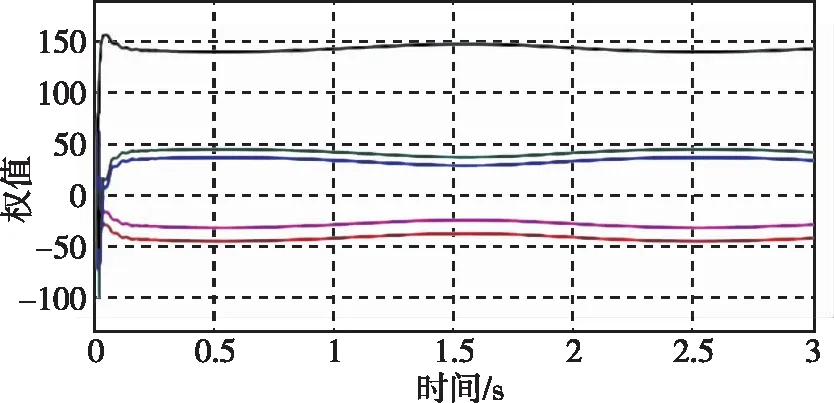
图6 基于LMS算法的权值变化图Fig.6 Weight change based on LMS algorithm
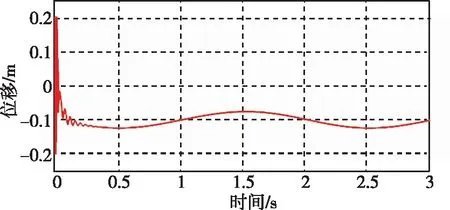
图7 基于LMS算法的电机位移变化图Fig.7 The motor displacement based on LMS algorithm
在相同仿真环境下,采用不同控制算法对同一控制对象进行控制,在同一周期信号的干扰下,对比不同控制算法的控制误差,仿真结果如图8所示。
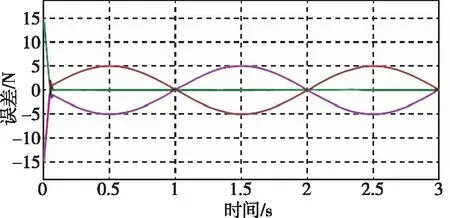
(a) 基于一般PID算法控制

(b)基于一般多点控制算法控制
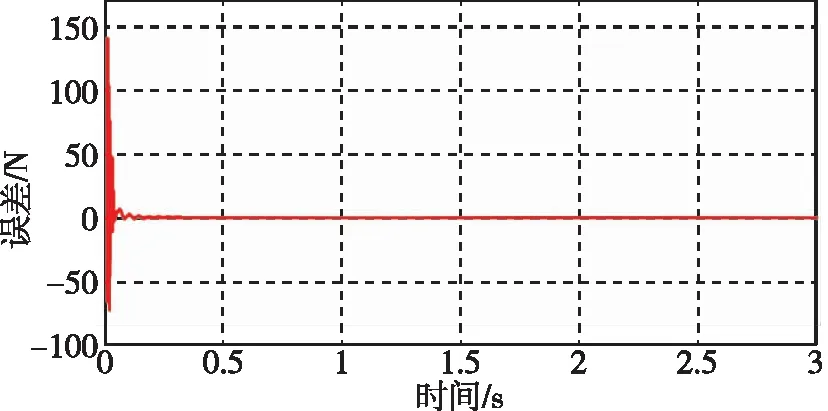
(c)基于LMS控制算法控制图8 不同控制算法误差对比图Fig.8 Error comparison of different control algorithms
由图8可以看出,当使用普通PID控制方法时,PID参数没有经过实验优化,绳索拉力呈现周期性变化。虽然能够减小拉力的变化量,但是无法消除干扰带来的影响。当使用单点独立控制的自适应算法时,由于多点耦合的存在,很难达到所有点均收敛到理想值。单一点的调整会造成其他点的变化,从而形成全局的振荡。
使用多点LMS算法,在经过短暂的学习之后,拉力迅速收敛到理想值,虽然依然存在周期性变化,但是变化的幅值已经非常小。收敛时间为0.2s,稳态误差为1.18%。基于LMS算法的多点重力补偿系统比基于PID和基于单点独立控制的效果更好。
4 航天天线重力补偿实验研究
为验证控制方法的可行性、有效性,本文选择DSPACE作为控制系统的主控制器来进行系统测试实验,经过硬件选型完成信号流的调理,最终搭建了整个控制系统,总体框图如9所示。

图9 控制系统Fig.9 Control system
整个系统主要包括上位机、下位机与设备装置3个层次以及其中的信号调理模块。设备装置包括驱动装置、被控装置、传感器等,主要实现系统状态信号的收集以及控制信号的执行;下位机主要与上位机、各设备之间实时通信,将设备装置的信息进行采集、信号融合与判断决策,发出控制指令,实现控制任务;上位机主要实现控制算法的设计与仿真,还有人机交互、权限管理、数据库管理与状态监控功能。
在搭建好的控制系统上进行无干扰环境、周期干扰两种工作环境下试验,验证控制系统的可靠性。无干扰环境实验精度要求:系统在10s内补偿误差小于5%。周期干扰实验精度要求:通过调整补偿力可以在有限的时间内恢复到理想值,稳态误差小于5%。
(1)无干扰环境实验
实验对多个目标补偿力进行实验,由于数据量较大,随机选取一组目标补偿力[45,25,45,25]N的两个不同目标补偿力展示拉力的响应情况,对上述两个点目标补偿力进行5次试验,观察电机响应速度以及响应误差,实验结果如图10、表1所示。

(a)45N目标补偿力响应曲线

(b)25N目标补偿力响应曲线图10 无干扰拉力响应图Fig.10 Tension response diagram without interference

实验序号目标补偿力y/N10s补偿力y/N10s误差e/%1A4545.2760.613B2525.1750.7032A4545.3170.704B2524.834-0.6613A4545.3450.767B2525.1100.4224A4545.2120.471B2525.1230.5025A4545.2970.660B2524.900-0.400
由图10和表1可以看出,在限制电机转速的情况下,根据电机需要的位移不同,收敛时间有所不同,但是都能在较短的时间内收敛到理想值。理论上来说目标补偿力的和与补偿对象的重力相等。但是补偿对象的实际重力无法获得,只能用测量值代替,系统无法达到绝对的静力平衡状态,最终会产生微小的振荡,这就是实验结果中后期波动出现的原因,该误差极小,可忽略不计。不同目标补偿力的两个点在10s附近,平均稳态误差约为0.5503%,最大误差为0.767%,可以满足基本要求。
(2)周期干扰环境实验
周期干扰采用其中一个电机的周期性力来产生,电机的周期性力幅值为5N,频率为0.5Hz。补偿力目标值[28,42,28,42]N,每个目标值进行5次实验。实验数据如表2所示。选择实验中不同补偿力的两个控制点展示了系统的响应情况,实验结果如图11所示。
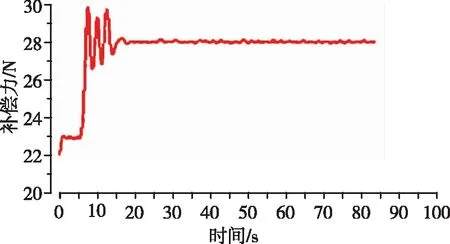
(a)28N目标补偿力响应曲线
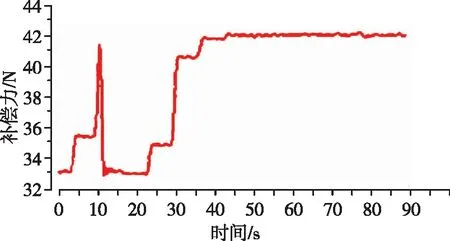
(b)42N目标补偿力响应曲线图11 周期干扰拉力响应图Fig.11 Tension response diagram of periodic interference

实验序号目标补偿力y/N稳定时间/s稳定补偿力y/N稳态误差e/%1A282028.1690.613B421842.8720.7032A281328.2560.704B421542.120-0.6613A281245.3450.767B421525.1100.4224A282645.2120.471B422425.1230.5025A281845.2970.660B422424.900-0.400
由图11和表2可以看出,经过有限的时间,系统最终都可以收敛到理想的拉力值,5次实验两个点的目标补偿力平均收敛时间为20.8s,最大收敛时间为35s,可以满足要求。平均稳态误差为0.526%,最大稳态误差为0.914%。航天天线进行模态实验的情况下,系统可以辨识外界实验环境,产生动态平衡,完成航天天线的重力补偿。
针对无干扰环境、周期干扰环境两种典型工况对实验样机进行了实验验证,证明静态环境系统可以在10s内收敛,平均稳态误差为0.550%,最大误差为0.767%;对于复杂的实验环境,系统补偿力可以在有限时间内稳定在理想值,平均稳态误差为0.526%,最大稳态误差为0.914%,表明了系统的快速性与准确性均能满足实际需求。
5 结论
本文设计了一种多点补偿、采用自适应算法主动式控制的悬挂重力补偿系统,可以自动进行系统模型辨识,修改控制器参数,主动调整绳索的补偿力。通过联合仿真及实验结果均验证了控制方案的有效性。解决了大型桁架式航天天线的地面实验微重力环境模拟的问题。
