智能驾驶车辆乘坐舒适性控制研究
2019-10-11杨万安李小龙吴建飞王博文
杨万安 李小龙 吴建飞 王博文
(泛亚汽车技术中心有限公司,上海 201201)
主题词:智能驾驶 乘坐舒适性 不适度 基于乘客的不适度指标
1 前言
从高级辅助驾驶到无人驾驶,IT企业与传统车企大都把研发重点集中在提升车载传感器的探测精度上,这些研究并未考虑车辆的乘坐舒适性。大多数自动驾驶控制算法简单地假定车辆行驶于理想的平整沥青路或水泥路面,通常直接输入固定的路面摩擦因数,并未考虑因路面状况变差引起的乘坐舒适性问题。而实际道路的不平整或损坏等常态因素应在相关研究中得以体现。在乘坐舒适性评价方面,ISO 2631-1:1997《机械振动与冲击人体暴露于全身振动的评价》和GB 4970—2009《汽车平顺性试验方法》能较好地应用于多轴向、短时间、稳态随机振动的场景,但当车辆行驶在典型坏路上承受较大冲击时,常使用的方法是建立主观评价与客观测量指标之间的联系[1-2]。
本文选取江南地区常见的2种坏路形式,研究行驶过程中车辆受到路面激励引起垂直方向运动时乘员乘坐舒适性的控制问题,包括车身俯仰/侧倾程度、悬架缓冲能力等,并基于不适度指标分析给出相应控制策略。
2 单一特征坏路不适度研究
坏路根据损坏情况可分为单一特征坏路和连续坏路段。单一特征坏路指平直的理想路面长时间使用后形成的单个不理想路面状态,例如路面沉降凹陷、路桥接缝、窨井凹坑或凸台、路面翘曲开裂等。车辆通过单一特征路面时会出现不同程度的颠簸,在路面损坏较严重或车速过快时会给乘员带来明显的不适感。为量化分析这类影响,本文开展了小范围调查分析。
选取江南地区较为常见的2 种特征路面,即单侧凹坑(由路面经常受重压沉降形成的凹陷)和路桥连接区段(由于连接区域路基沉降引起的路面/桥面不平滑过渡),如图1 所示。对样车在该路段以不同车速(30~70 km/h 范围内的7 个车速)行驶时的响应进行路谱采集,并在四通道道路模拟试验机上精确再现。
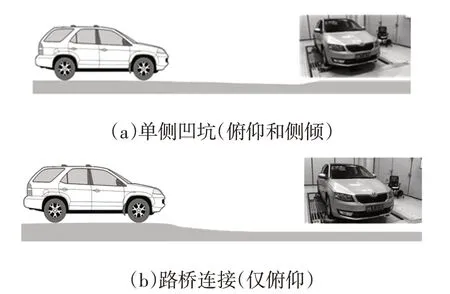
图1 引起舒适性问题的典型坏路
车辆驶过这类路面时,车身出现明显的俯仰和侧倾,与常规疲劳试验路谱采集方式不同,本文将4个传感器置于车身上左前、右前、左后、右后4个远端位置,以使反映俯仰/侧倾运动的低频段信号有更好的信噪比。
参加评估的总人数为100人,男女比例约为3∶1,平均年龄31.7 岁,评估者中52%的人经常驾车,其中58%的评估者上班路线以城市道路为主。
将不会引起舒适性抱怨定义为0分,不舒适性达到完全不能接受定义为100分。评估过程中,评估者首先体验在次低车速和次高车速下的不舒适程度(简称不适度),形成参考评分30分和80分,然后将不同车速下的行驶过程进行随机组合,给出7个车速下的主观感知评分,称为基于乘客感受的不适度指标(Passenger Based Ride Index,PBRI)。
图2 所示为某车辆驶过两种特征路面时的总体评估结果。由图2 可知,路桥连接路段PBRI 随车速单调增加,但并不呈简单的线性关系,它取决于该路面沉降形态下以某个车速驶过此路段时悬架的腾空程度,由于左、右轮几乎同时跳动,整个车身以俯仰运动为主;单侧凹坑路段的PBRI在40 km/h附近明显降低,乘坐舒适性显著改善,这与悬架的偏频特征有关,当以合适的车速驶过此路段时,悬架的屈伸正好在特定车速下对路面扰动有最好的缓冲,从而降低了不适度。

图2 典型坏路的PBRI曲线
对评估数据的细分研究表明,乘员个体对特征路面引起的不适度感知差异较大,不同车速下的不适度感知分布也不相同。如图3所示,评估者对车身运动形式单一的路桥连接的不适度感知有更好的集中度,对于引起侧倾加俯仰的单侧凹坑,其不适度感知集中度略低。2种路面在高速段的评估结果有比较好的集中度,在低速段则比较分散。

图3 不同车速下两种坏路的PBRI分布
对评估结果进行进一步层次聚类,从评估者群体细分来看(见图4),对坏路的不适度感知存在群体之间的差异。例如,对单侧凹坑的感知可以大致分为4类:第1类人群(65%)年龄和驾龄等的统计值与样本整体接近(平均年龄为31.7岁,平均驾龄为6.4年,日常行驶道路中城市道路占58%,自驾比例为52%);第2 类人群(13%)的平均年龄偏大(37.5岁),且驾龄偏长(10.4年);第3 类人群(10%)、第4 类人群(5%)均为城市道路行驶比例偏少(48%)的人群。对于路桥连接的感知可以大致分为3 类:第1 类人群(68%)年龄和驾龄等的统计值与样本整体接近;第2 类人群(15%)的年龄偏大(36岁),且驾龄略偏长(8.2 年);第3 类人群(9%)的自驾比例明显偏多(78%),且更多是在城市道路上行驶(71%)。
从图4可以看出,对于不同坏路的不适度感知存在群体差异,年龄、驾龄、城市道路行驶比例以及自驾率等因素对评估者的评判有较大影响。针对这些乘员个体特征对车辆进行差异化舒适性控制,可带来更加舒适的驾乘体验。
本文关注乘员自身对舒适性扰动的厌恶程度(即不适度),与车型、路面无关,因此此不适度关系可作为某类乘员乘坐不同车辆行驶在不同路面上时的共同参照。
3 控制策略应用
在更大范围内选取普通驾驶群体,用前文描述的过程对不同典型坏路进行评价,得到更精准的PBRI分布,并将以此形成的控制策略嵌入智能驾驶的控制体系中,将使乘员得到更加智能化的乘坐舒适性体验。
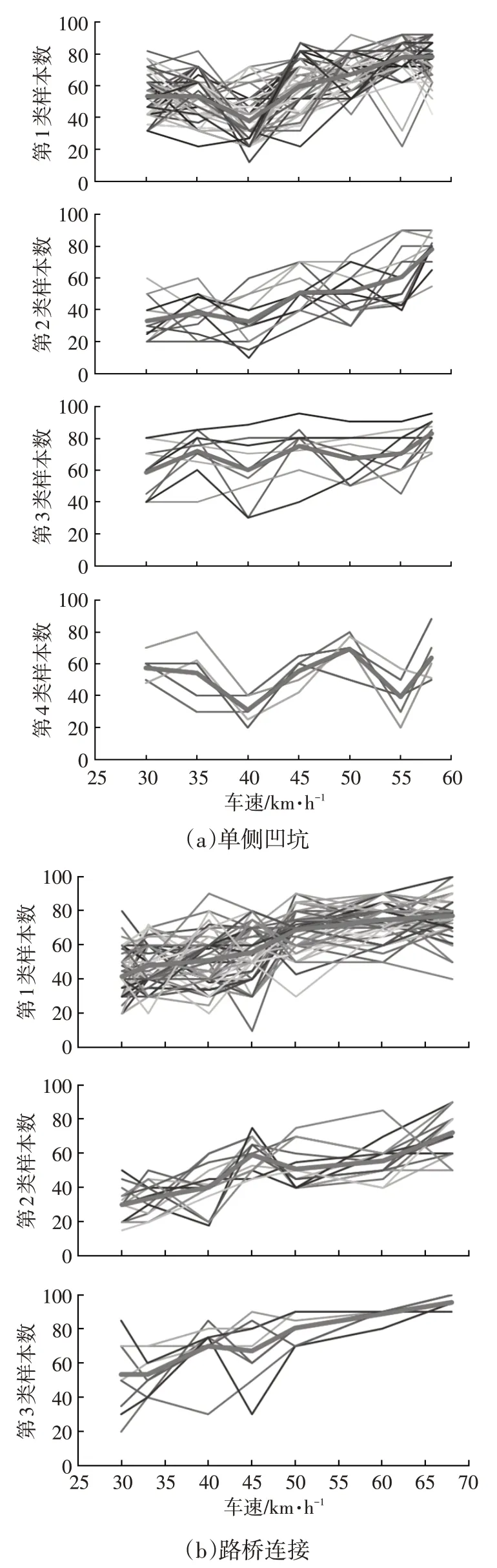
图4 评估者分类下的PBRI曲线
3.1 PBRI的应用层级
智能车辆应把反映乘员舒适性的PBRI集成到驾驶控制策略中。PBRI 的应用可分4 个不同层级:根据乘员的偏好将所经过路面的PBRI与其他相关信息进行加权决策,为特定乘员提供最适合的路径规划;在条件许可的前提下发出常规变道指令,使车辆变换到较为平整的车道上行驶;通过车道内行驶轨迹的微调避开尺度不大的特征路面(如较小的凹坑、凹陷或凸起的窨井盖等);根据此路段的PBRI曲线,结合个性化偏好,获取最佳降速目标,降低不适度感受。
3.2 个性化控制
智能驾驶车辆应该兼顾乘员、车辆、道路信息。如图5所示,个性化定制中的主要因素体现了乘员的舒适性偏好,基于个人偏好的历史数据和特定车辆的悬架特性,再结合具体任务信息实时给出最适合的控制目标和过程。
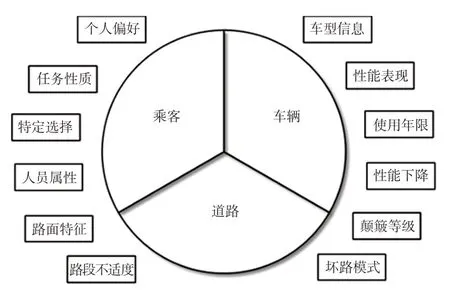
图5 舒适性控制个性化定制中的主要因素
3.3 应用场景
将基于乘坐舒适性需求的控制系统集成到传统的智能驾驶系统中,如图6所示,智能车辆驶过某典型坏路特征,车载传感系统进行基础判别后有选择性地将超过设定阈值的响应信号上传,并计算出相应的PBRI。此特征信息将自动分享给后续规划经过相同路段的车辆。
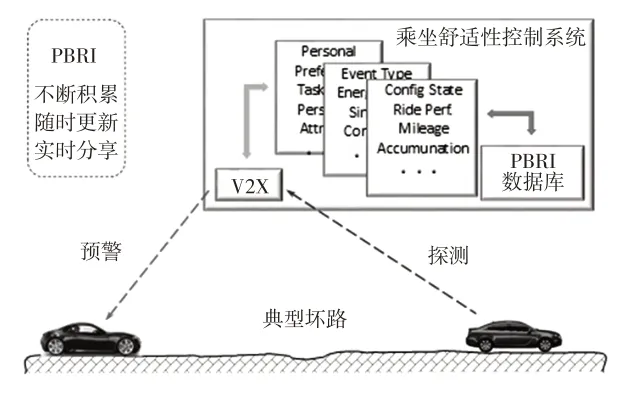
图6 舒适性控制策略的典型应用场景
4 结束语
本文对单一特征坏路的不适度进行了研究,针对典型坏路采用基于乘客感受的不适度指标对不适度感受及其分布特点进行了量化研究,并展望了其应用前景。
