基于辅助增压系数补偿的IEHB系统轮缸压力控制研究*
2019-10-11李玉善唐惟胜何祥坤季学武武健
李玉善 唐惟胜 何祥坤 季学武 武健
(1.山东科技大学,青岛 266590;2.清华大学 汽车安全与节能国家重点实验室,北京 100084;3.聊城大学,聊城 252059)
主题词:集成式线控液压制动系统 压力分段控制 辅助增压系数 试验分析
1 前言
集成式电子液压制动(Integrated Electro Hydraulic Braking,IEHB)系统(又称集成式线控液压制动系统)将伺服电动增压装置与主缸集成在一起,在保证整体结构紧凑的同时,通过联合液压调节单元调节输出制动压力[1-3]。与传统制动系统增压、保压、减压过程有所不同,电动主缸的引入需要更多的子系统进行协调配合,且整个系统的非线性增强。所以,IEHB 系统的轮缸液压力调节过程更加复杂。
目前,不仅一些世界知名零部件企业推出了新型制动系统[4-5],国内部分科研机构对电子液压制动系统(Electro-Hydraulic Braking System,EHB)也开展了大量的研究工作[6-8]。此外,Xiangkun He 等[9]基于IEHB 系统搭建了神经网络滑模车辆稳定性控制策略,并考虑了模型不确定性、参数变化及外界干扰的影响。李静等[10-12]对设计的集成电控制动系统进行了参数辨识、响应特性分析及试验研究。Zhuoping Yu 等[13-14]提出了一种能够实现主动安全的I-EHB 系统方案,并进行了仿真分析与试验研究;针对I-EHB系统摩擦等非线性因素,采用颤振补偿方法设计了液压力控制器。
现有文献中,针对IEHB系统控制的研究,尤其是轮缸液压力控制研究还较少见。IEHB机电液系统本身响应迟滞性、初始压差对压力控制精度的影响及制动工况的多样性导致压力的精确控制难以实现。为解决上述问题,本文在对IEHB 系统电动主缸进行开环试验标定及分析的基础上,结合压力分段控制构架,采用基于辅助增压系数查表及反馈PID 的控制方法对电动主缸进行调控,同时利用逻辑门限值的方法控制增减压阀及电动泵,设计了基于IEHB 系统的轮缸压力控制器。通过NI_PXI 搭建硬件在环仿真试验平台,分别在不同幅值阶跃和正弦工况下进行闭环试验研究,验证所提出控制策略的有效性。
2 IEHB系统介绍
2.1 系统组成
本文所采用的IEHB系统方案如图1所示。该系统是一种结构紧凑、布置方便的新型线控制动系统,主要包括电动主缸模块(通过永磁同步电机带动滚柱丝杠机构前进或后退,实现主动制动功能)、液压控制单元及轮缸模块等。

图1 IEHB系统方案
2.2 系统工作原理
增压时,电动主缸(电机+减速机构+主缸)接收正的扭矩信号并前进,液压控制单元(Hydraulic Control Unit,HCU)中增压阀打开,减压阀关闭;保压时,电动主缸停止动作,HCU中增压阀、减压阀同时关闭;减压时,电动主缸接收负的扭矩信号并后退,HCU 中增压阀关闭,减压阀打开,电动泵(驱动电机+柱塞泵)工作。
3 IEHB系统控制器设计
对IEHB 系统中的电动主缸进行开环试验标定,提出一种协调IEHB 系统各部件的轮缸压力控制策略,控制流程如图2所示,其中,Pw、Pwd分别为实际压力和目标压力。
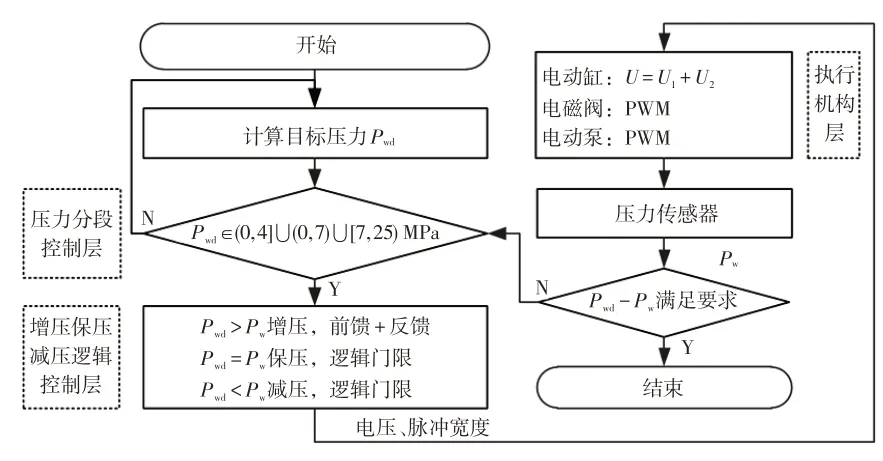
图2 IEHB系统控制流程
增压模式下采用前馈+反馈的控制策略,前馈是指Pr<nPd(10%≤n≤20%)时,向电动主缸输入较大的扭矩信号,Pr≥nPd时,根据目标压力查表得出当前电动主缸电压,同时,为了克服初始压差及系统响应迟滞问题,选择一个试验标定的辅助增压系数,两种方式同时保证整个系统快速响应,并采用反馈PID控制方法保证压力响应跟随,此时增压阀打开,减压阀关闭,电动泵不工作。保压模式下,向电动主缸输入零信号,增压阀、减压阀均关闭,电动泵不工作。减压模式下,向电动主缸输入一定的扭矩信号,增压阀关闭,减压阀打开,电动泵开始工作,并向电动泵输入一定的占空比及频率,实现减压。
3.1 分段控制
试验台油压传感器量程为0~25 MPa,但实际车辆控制中施加10 MPa制动压力基本可达到0.8g的制动减速度,且大部分制动工况压力为5~6 MPa,故本文验证的压力范围为0~10 MPa。鉴于IEHB 系统具有强非线性特点,在不同工况下(低压、高压)调节时系统特性变化大,导致相同控制参数很难响应系统工况变化,考虑在不同区间采用压力分段控制的方法对低压工况与高压工况进行分层,选用不同的压力调整系数,实现压力增、减速率的改变,达到压力控制的目的。实际试验调试发现,3段控制已能满足制动需求,故分为3层(Pd≤4 MPa、4 MPa<Pd<7 MPa、Pd≥7 MPa)进行压力控制研究。但具体分段方式应根据系统本身特性及控制方法来确定。
基于分段压力层,可以对每段压力控制区的电动主缸、电磁阀、电机泵控制参数进行调节,整个控制器可调节范围增大,对不同工况适应性更好。
3.2 IEHB系统电动主缸控制策略
3.2.1 电动主缸与轮缸压力关系标定
采集的油压传感器信号为电压信号,其电压量程为0.5~4.5 V,对应压强为0~25 MPa。表1所示为电动主缸开环试验标定数据,其中M为输入电动主缸阶跃信号的幅值,Pv为油压传感器电压信号。
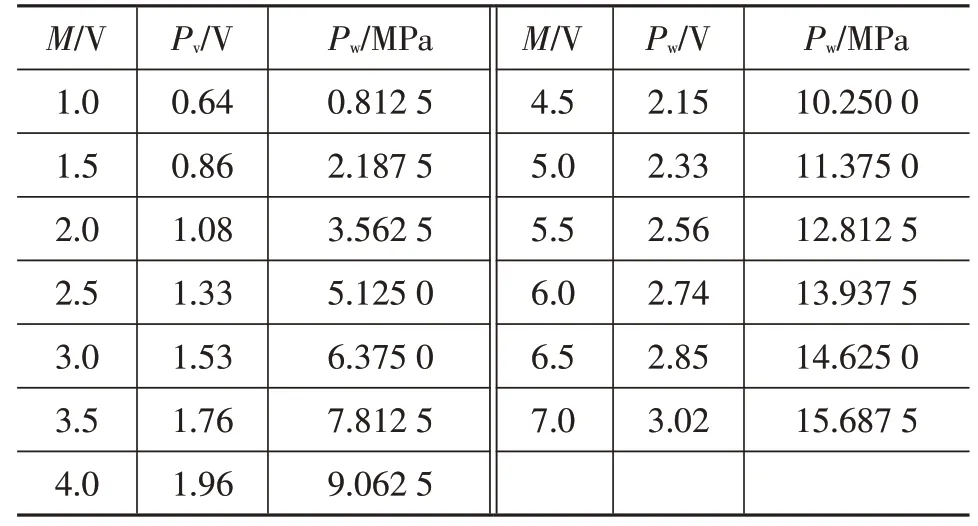
表1 电动主缸控制输入与轮缸压力关系标定
最后,利用MATLAB_cftool 以油压传感器采集的电压信号换算为压力信号进行线性拟合:

考虑到系统本身的非线性特点,本文选用以油压传感器采集电压信号换算为压力信号进行二次拟合:

式中,Vm为电动主缸控制输入电压。
3.2.2 辅助增压系数确定
辅助增压系数如表2 所示。其中,M为电动主缸阶跃控制输入,M0为有一定初始压差时电动主缸控制输入。通过对表2 分析可知:如果从有一定初始压差开始增压,增加到与阶跃信号M对应相同的压强时,所需的电动主缸信号值明显增大。例如:1.5 V 阶跃信号下轮缸(初始压力为零)能够达到2.187 5 MPa 的压强,但如果轮缸初始压差为0.812 5 MPa,达到与1.5 V 相近的压力,则电动主缸在1 V 信号基础上需增加到1.7 V,而非1.5 V。
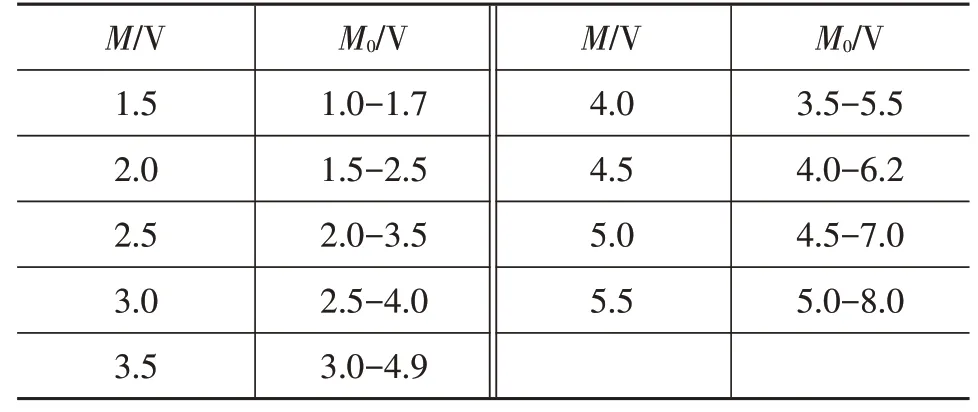
表2 辅助增压系数确定
针对该IEHB系统,上述现象的可能原因包括:初始压差不同时,同样的目标压力,相同时间内增压,导致增压速率减小;电动主缸响应迟滞及摩擦问题,使得系统增压过程非线性特征增强。
所以,为了使电动主缸响应更快,上述拟合的电动主缸电压与压力信号可供控制时前馈查表使用。但这种方法忽略了电动主缸响应迟滞特性及压差变化,导致电动主缸的控制输入不同。本文通过试验数据标定方法,对表2 分析可得,选取辅助增压调节系数K∈[1,1.4]来满足更多的增压工况,保证压力响应跟随更快。同时,为了防止压力超调过大及实现压力跟随控制,以实际压力与目标压力作差,选取传统PID控制方法控制电动主缸。电动主缸的电压控制信号U可以表达为:
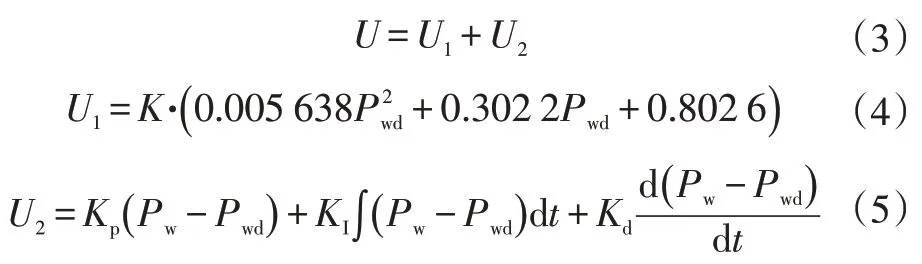
式中,U1为前馈查表Vm与辅助增压系数乘积所得电压;U2为反馈PID控制所得电压;U电动主缸控制输入;Kp为比例增益;KI为积分增益;Kd为微分增益。
3.3 增压阀、减压阀及电动泵控制策略
制动系统一般包括泵控系统与阀控系统,本文选择电动主缸加压的方式(属于泵控系统),由于其响应及控制精度都较高,所以对于电磁阀及电动泵仅采用逻辑门限值的方式进行开环调控,控制原理如图3所示。为了更好地实现高速开关阀比例开关功能[8],占空比调制频率选为2 kHz。
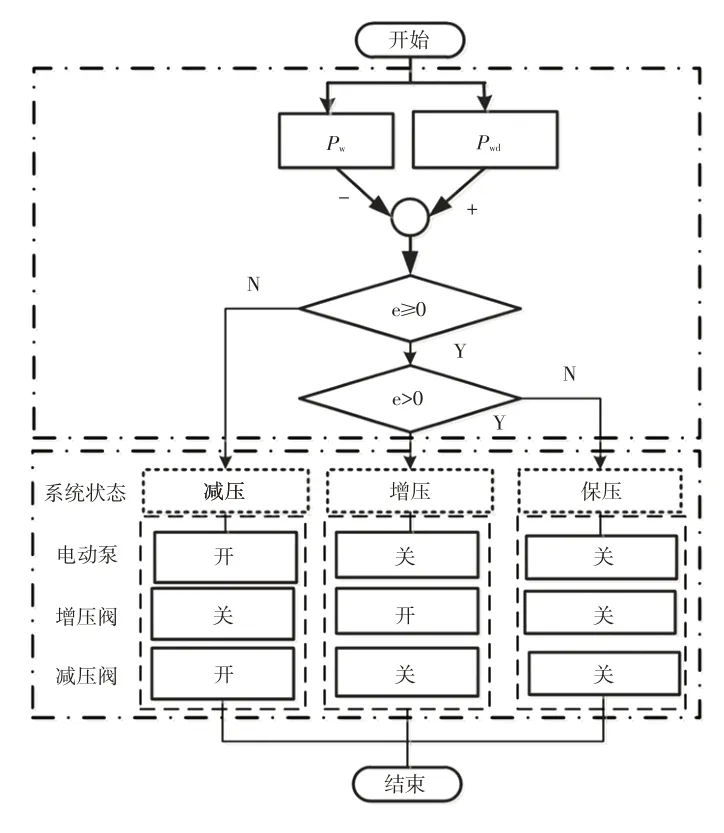
图3 增压阀、减压阀及电动泵控制策略
4 试验分析
为验证IEHB系统压力控制算法,搭建试验平台,试验方案及试验台实物分别如图4、图5所示,试验台架主要由上位机HostPC单元、下位机控制器单元、驱动器单元和执行器单元等组成,控制器模型可以在LabView中搭建,完成信号采集及压力控制验证。
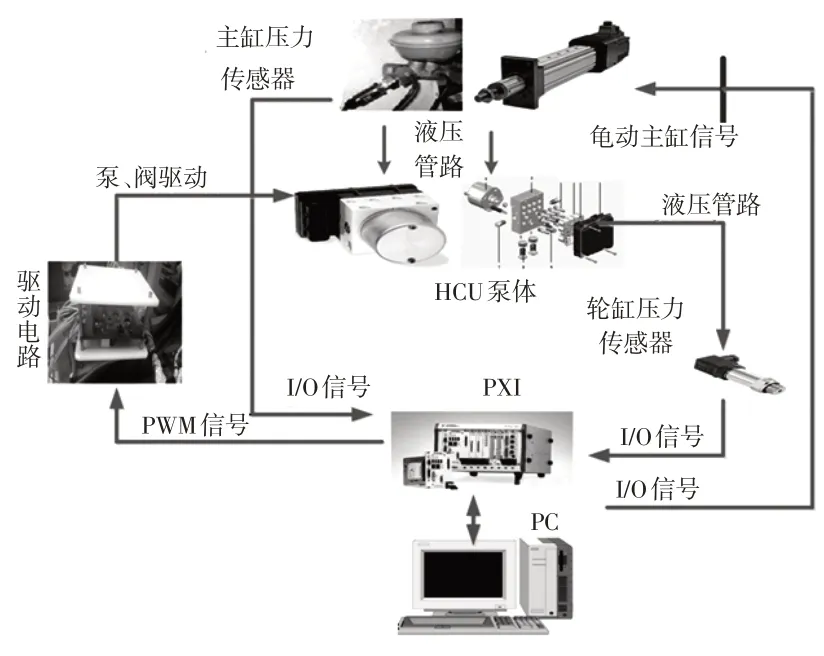
图4 IEHB系统压力控制试验执行方案
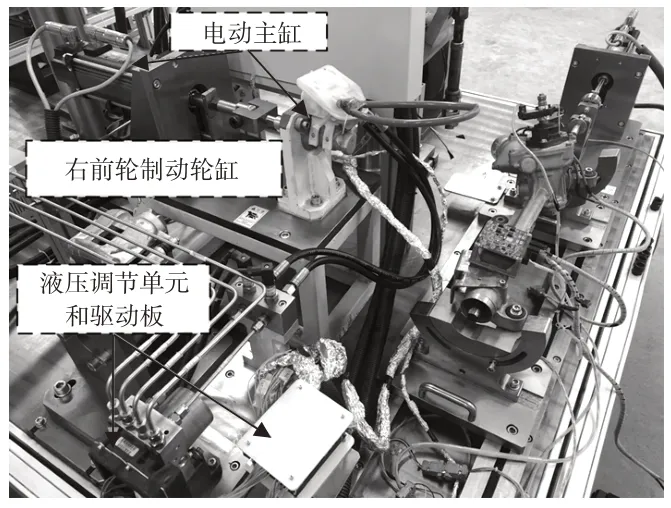
图5 IEHB系统执行机构在环试验平台
具体执行过程为:通过PXI-LabView采集主缸传感器及轮缸传感器信号,并将其传送给IEHB 系统压力控制器,获得相应执行部件的控制信号,通过PXI-Lab-View及驱动板,将占空比信号实时发送给增压阀、减压阀及电动泵,通过PXI-LabView将模拟电压信号实时发送给电动主缸,实现整个系统压力的控制。
图6、图7 所示为在不同幅值的阶跃、正弦输入工况下IEHB 系统轮缸压力跟随曲线。由图6 可知,该系统阶跃响应在150 ms 左右可达到目标压力;由图7 可知,该系统控制策略能够很好地实现压力跟随;但是,由图6a、图7a 可知,在低压控制阶段波动较大,还有待完善。
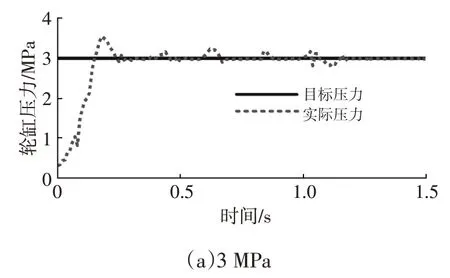
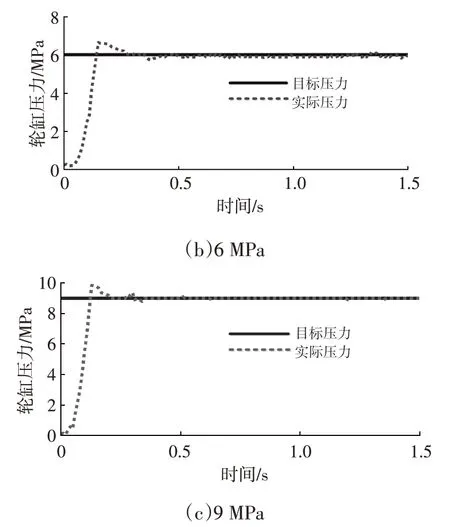
图6 不同幅值下轮缸压力阶跃响应跟随曲线

图7 不同幅值下轮缸压力正弦响应跟随曲线
图8 所示为正弦输入幅值6 MPa 的目标压力下不同辅助增压系数与轮缸压力的关系。由图8 可知,在一定范围内,辅助增压系数对压力控制起关键作用。图8 中,低压处信号存在波动,主要原因是电磁干扰、噪声及机电液系统内部摩擦变化等,致使每次试验采集的油压传感器数据结果稍有波动,但基本趋势不变。
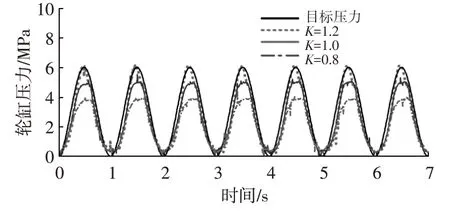
图8 辅助增压系数对比
5 结束语
针对IEHB 系统本身响应迟滞性、初始压差及制动工况的多样性导致压力难以精确控制的问题,本文通过对IEHB 系统开环试验分析,基于压力分段构架提出一种基于前馈的电动主缸控制方法和基于逻辑门限值的电磁阀及电动泵控制方法,并在不同阶跃及正弦工况下进行了试验分析,结果表明,该IEHB系统响应时间可达150 ms左右,较好地实现了压力跟随控制。后续研究将考虑对电动主缸或电磁阀进行建模,并选择鲁棒性较强的控制算法完善压力控制策略,以减小压力控制偏差。
