基于RLS 的永磁同步电机参数辨识技术研究
2019-10-09罗小军陈天航朱思明
罗小军,陈天航,朱思明,宋 宝
(1.广东拓斯达科技股份有限公司 研究院,东莞523822;2.华中科技大学 机械科学与工程学院,武汉430074)
随着电力电子技术、微电子技术、永磁体材料技术的飞速发展, 以及控制理论研究的不断深入,交流永磁同步电机伺服控制系统得到了迅速的发展[1],在高科技领域得到了广泛的应用[2],高质量的制造需求对伺服系统的控制性能也提出了更高的要求。 利用永磁同步电机的参数能快速地实现伺服系统的控制器参数自整定[3],提升伺服系统的响应性能,还能实现弱磁控制,拓宽调速范围等功能[4]。因此永磁同步电机参数辨识技术的研究对伺服系统的性能提升影响重大。
目前,常见的电机电气参数辨识算法有频率响应法、模型参考自适应算法、卡尔曼滤波算法、遗传算法以及最小二乘法等[5],每一种辨识算法各有优缺点。 其中,递推最小二乘法算法简单,易于实现,辨识过程中不需要存储所有数据,一组输入输出数据值即可进行一次计算,计算量小,实时性高[6]。 伺服驱动器的计算过程实时性要求高,递推最小二乘法非常适合在伺服驱动器中实现电机参数辨识。 故在此以表贴式永磁同步电机为研究对象,采用阶跃直流电压为激励信号,分析并补偿了死区和功率器件压降所导致的输出电压差;基于递推最小二乘法实现了对永磁同步电机定子电阻和电感参数的辨识。
1 参数辨识整体方案
永磁同步电机的参数辨识原理如图1 所示,辨识部分位于虚线框中。
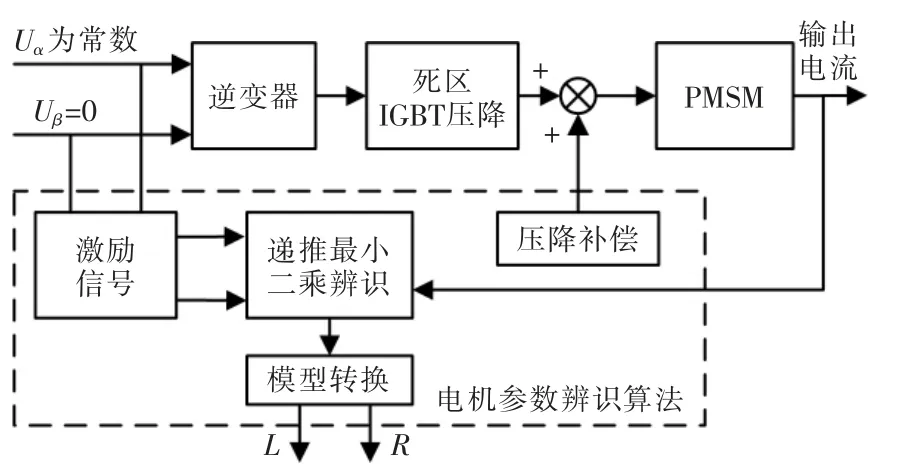
图1 永磁同步电机参数辨识原理框图Fig.1 Principle block diagram of parameter identification for permanent magnet synchronous motor
利用输入激励信号电压值和输出电流采样值,基于递推最小二乘法可以得到电机的定子电阻和电感。 由于死区和功率器件压降会导致实际施加到电机线圈上的电压小于理论给定值,影响电机参数辨识的精度,因此需要对输出电压差值进行分析和补偿。
2 激励信号及递推最小二乘算法
采用阶跃输入电压作为电机参数辨识的激励信号,简单易于实现,输入和输出数据能充分反映系统在各频段的特性。 在实际应用中,可以采用电机定子电流近似达到电机额定电流时的电压值作为激励信号的幅值。
电机定子线圈的传递函数模型可近似为一阶惯性环节[7]。 伺服系统实际上是一个以主控芯片中断周期为步长的离散系统,则离散域的电机模型为

电机定子输入电压与输出电流的差分为

式中:Iout(k)为k 时刻的电流值;u(k)为k 时刻的电压值。 对应于电机电气参数辨识的输入输出矢量h(k)和待辨识参数矢量θ 分别为

采用以下递推公式进行迭代计算,即可得到电机电阻和电感参数:

式中:I 为同维度的单位矩阵;α 为足够大的正实数(104~106);ε 为零矢量。
3 死区及功率器件压降补偿
在伺服驱动器控制中,由于无法直接产生恒定的直流电压,实际上是通过SVPWM 调制产生PWM波,施加在逆变器上产生脉冲电压,进而在电机定子上获得等效的直流电压。
为了简化辨识过程, 如图1 所示, 令Uβ=0,Uα为阶跃电压值,经逆变器输出,电机U 相的电压值即为Uα。 由于电机的三相电流均为直流,且电流方向不变,则电机定子产生的磁场方向固定,电机转子会锁定在固定位置。 待转子锁定稳定之后,等效电路如图2 所示。
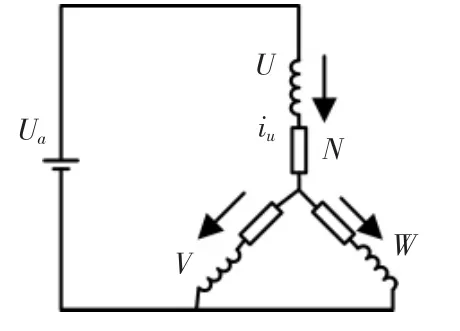
图2 电机参数辨识等效电路Fig.2 Equivalent circuit for motor parameter identification
由于电机的定子电阻值较小,给定的输入电压Uα较小, 非线性因素带来的电压差值不能忽视,对输出电压进行准确的补偿至关重要。 在伺服系统中, 逆变器的开关死区和IGBT 的导通压降是影响输出电压的2 个主要因素。
电机参数辨识输入电压激励信号对应三相上桥臂的PWM 波形如图3 所示,Sa+,Sb+,Sc+分别为逆变器3 个上桥臂的PWM 驱动信号,各PWM 波的占空比不变。

图3 电机参数辨识激励输入电压的三相PWM 波Fig.3 Three-phase PWM wave of motor parameter identification exciting input voltage
逆变器中死区的存在会导致实际施加到电机定子线圈上的电压偏小,对Uα指令值进行调整可以实现对死区输出电压差的补偿[9]。 电压Uα补偿量为

式中:Ud为母线电压;Td为死区时间;T 为PWM 周期。
在1 个开关周期内,在T2和T4时间段内,电压矢量不为零,电流流经U 相上桥臂的三极管和V 相及W 相的下桥臂的三极管,该时间段内产生的压降为2Vsat; 在T1,T3和T5时间段内, 电压输出矢量为零, 此时电流流经一个续流二极管和一个三极管,该段时间内产生的压降为Vsat+Vd。 则输入电压由于IGBT 压降产生的输出电压差为

式中:Vsat为三极管压降;Vd为续流二极管导通压降;D 为有效电压矢量的占空比;Vf为IGBT 导致的电压损失。 由于激励输入电压值很小,有效电压的占空比也很小,则输出电压误差可以近似简化为一个常量,即:

忽略死区导致的输出电压差,则电机电枢上的电压应满足:

式中:Uu为电枢U 相的电压;Iu为电枢U 相的电流;R 为电枢电阻。 Uα给定不同的激励输入电压值Uα1,Uα2分别测量稳定后的电流Iu1,Iu2, 则可以通过式(11)计算出电枢电阻值和IGBT 压降值,得

为了保证不同输入激励电压下的Vf大小近似,Uα1,Uα2差值不应过大,也不能过小,否则会导致输出电流差值过小,电流采样值无法区分。 为了消除随机误差,可多次测试并计算在该输入电压值附近电压下的IGBT 压降值。 在利用递推最小二乘法进行计算时, 采用输入电压值减去IGBT 压降值作为输入电压值参与迭代计算。
4 仿真试验
电机参数辨识仿真模型如图4 所示。 其中,IGBT 的导通压降设置为1 V,续流二极管的压降为1 V,PWM 的死区时间设置为2.5 μs,频率为10 kHz,电机的初始电角度为0。

图4 电机参数辨识算法的仿真模型Fig.4 Simulation model of motor parameter identification algorithms
为了简化仿真过程,在仿真中未进行激励输入电压幅值搜索的过程,直接采用幅值合理的阶跃电压输入, 对应U 相稳态电流约为额定电流的1.25倍,对电机U 相电流进行采样,并将激励信号一起通过图4 中数据采集模块进行存储, 然后通过MatLab 中的M 文件, 离线地利用递推最小二乘法实现对电机参数的辨识。
仿真试验所用电机参数为华大电机厂130STM0642030LM1DD 型表贴式三相交流永磁同步电机参数,相关参数见表1。
为了模拟实际使用时伺服驱动器电流的采样噪声,在电流输出值上结合伺服驱动器的电流样噪声的特点叠加了高斯白噪声。

表1 仿真电机参数Tab.1 Simulation motor parameters
由辨识计算过程得到的电机相电流、电阻和电感参数波形如图5 所示。
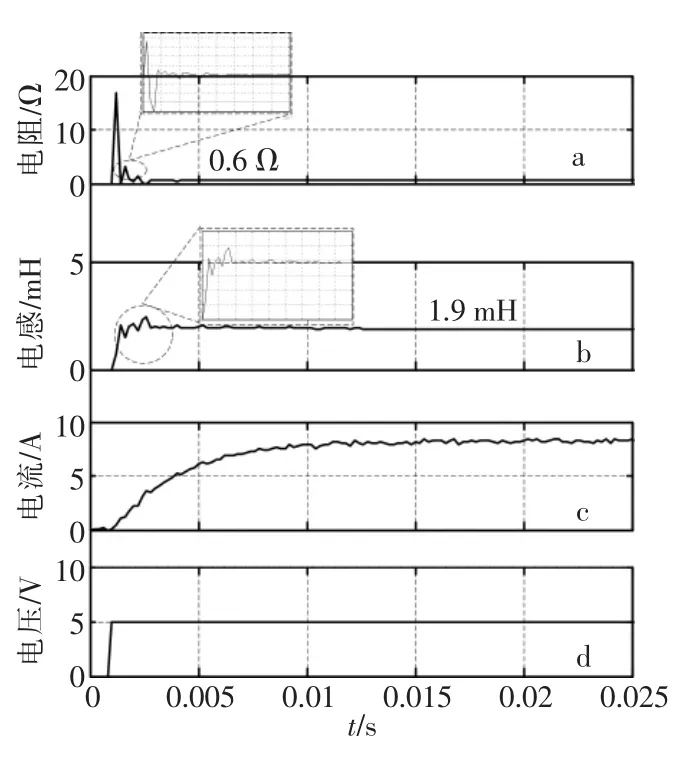
图5 电机参数辨识波形Fig.5 Motor parameter identification waveform
由图可见,在0.001 s 时施加阶跃电压,电流约在0.015 s 达到稳态,在阶跃响应的过程中电阻和电感的辨识参数如图5a,b 所示,经过约2 ms 的波动,递推算法开始收敛,电阻和电感的数值逐渐趋向于稳定。 由图的局部放大可见,电阻的收敛值约为0.6 Ω 电感的收敛值约为1.9 mH。 对比该电机实际电感和电阻参数可以发现,辨识得到的电感、电阻值与实际值基本一致。 由此从理论上验证了电机参数辨识算法的有效性。
5 试验研究
为了验证电机参数辨识方法,搭建了电机参数辨识试验平台,伺服驱动器为实验室自研产品,型号为TSVB-PAL050A,驱动器以STM32F407 为主控器,FPGA 为协处理器,采用SVPWM 的调制方式控制三相电压型逆变器的输出。 所用伺服驱动器的相关参数见表2。
为了验证电机电气参数辨识算法的普遍适用性,选用了功率不同的3 种电机,试验电机均为华大电机厂的表贴式交流永磁同步电机,电机型号分别为80ST-M01330LF1B,130ST-M10015LFB,130ST-M0642030LM1DD,电机的相关参数见表3。
表2 TSVB-PAL050A 伺服驱动器参数Tab.2 TSVB-PAL050A servo driver parameters

表3 试验测试电机参数Tab.3 Test motor parameters
以130ST-M0642030LM1DD 电机的辨识试验对辨识过程进行说明。
电机参数辨识U 相电流波形如图6 所示。 辨识过程包括激励电压幅值搜索、IGBT 压降计算、 电机参数辨识3 个步骤。①在电压幅值搜索的过程中,U相电流逐渐缓慢增大,直至分别达到额定电流的80%,90%以及100%,为了避免电流过大损坏电机,电压幅值缓慢增加电流上升速度较慢,搜索过程时间较长;②在IGBT 压降计算过程中,分别再次施加激励通过平均值滤波的方式计算各电压下的稳态电流,并计算得到IGBT 压降和电阻值;③再次分别施加电压信号采用递推最小二乘法实现电机参数辨识。

图6 电机参数辨识U 相电流波形Fig.6 Identification of U phase current waveform by motor parameters
图6显示了130ST-M0642030LM1DD 电机在整个辨识过程中电机U 相电流的变化过程。 在辨识算法迭代过程中电机的参数变化曲线如图7 所示,图中电机的电阻、电感值分别收敛于0.56 Ω 和1.7 mH。 电机的实际参数为电阻0.6 Ω,电感1.88 mH,辨识的误差分别为6%和9.5%。 另外2 台电机的辨识结果见表4。
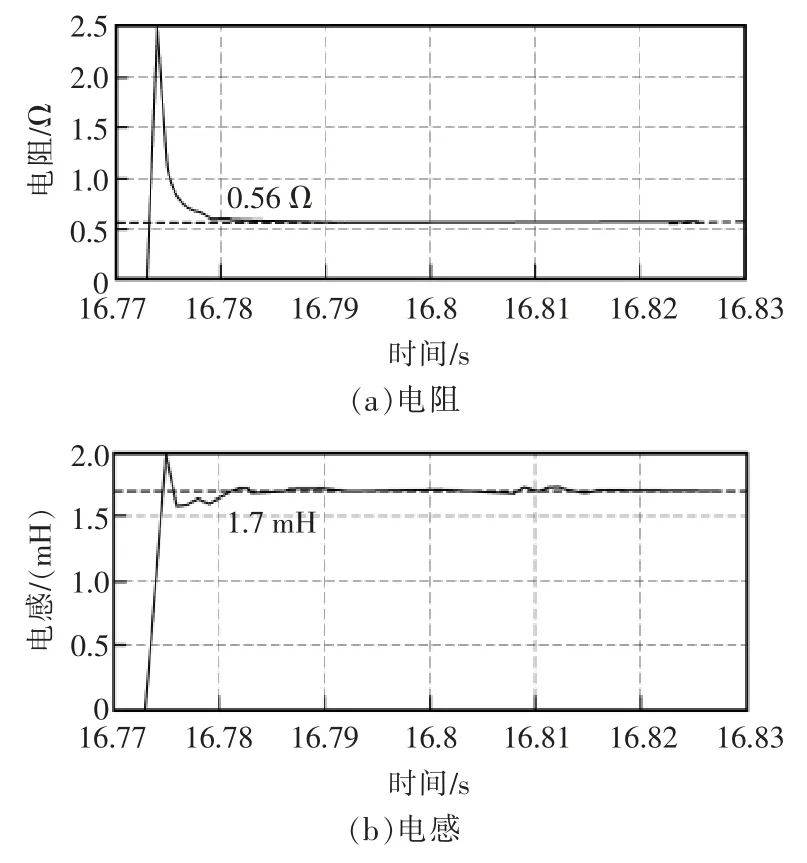
图7 电机电阻、电感参数的变化曲线Fig.7 Variation curve of resistance and inductance parameters of motor
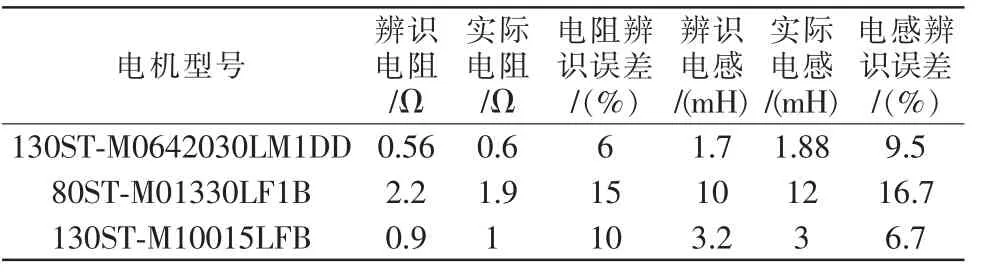
表4 电机参数的辨识结果及误差Tab.4 Identification results and errors of motor parameters
由表可知,参数辨识结果存在一定误差,主要原因在于输出电压误差未能完全补偿且电流采样存在较大的噪声。 另外,额定电流大的电机参数辨识的精度更高,实际上由于试验使用的伺服驱动器功率较大,电流采样电阻值小,采样精度比较低,额定电流小的电机由于U 相电流的采样误差过大其参数辨识结果会更差。
总而言之,经过试验验证,所提出的电机参数辨识方法在实际应用中是有效的。
6 结语
针对表贴式交流永磁同步电机,研究了参数辨识技术,阐述了激励信号幅值的确定方法,分析了死区和功率器件压降对电机参数辨识的影响;提出了补偿方法,基于递推最小二乘法实现了对电机电阻和电感的辨识,计算量小,收敛速度快;通过仿真和试验验证了辨识算法的正确性。
