基于STM32控制的便携式模拟电磁炮设计*
2019-10-09王伟祥
王伟祥
(武汉交通职业学院,湖北 武汉 430065)
电磁炮是利用电磁力将弹丸加速到高速度,使电源电能转换为物体动能的新概念武器。传统火炮是利用弹药爆炸时的瞬间膨胀产生的推力将炮弹迅速加速,推出炮膛。两者相比,电磁炮具有速度高、性能优良和可控性好等诸多优势,故各国都将电磁炮作为新概念武器装备展开军备竞赛。以美国为首的一些发达国家投入巨额经费进行电磁炮的实验研究,并取得了突破性的成果,已成功试射了5倍音速,射程200km的电磁炮。随着智能技术的发展,武器装备逐渐向智能化、小型化方向发展,欧美各国也在逐渐考虑将电磁炮小型化以构成一种智能型单兵武器。ST(意法半导体)公司设计的STM32F103ZET6单片机,其内部资源较8051、AVR和PIC多出很多,基本上接近于计算机的CPU,具有高性能、存储空间大、资源丰富、低成本、低功耗、运算速度快的特点。故本研究采用此款单片机作为核心控制部件,设计了一个便携式智能模拟电磁炮发射系统,以下将从系统方案、理论分析、硬件电路、系统软件等方面进行阐述便携式智能模拟电磁炮的设计与实现。
1 系统方案
本文介绍了一种实现基于STM32控制模拟电磁炮发射系统的可行方案。该系统方案主要由STM32F103ZET6单片机最小系统控制电路、储能电路、电压检测电路、电磁炮发射电路、舵机云台、摄像头识别定位模块、TFT显示屏、矩阵键盘等部分组成。系统的总体结构框图如图1所示。

图1 系统总体结构框图
该系统有两种控制方式:手动控制和自动控制。当手动控制时,先通过按键输入定标点距离,单片机对电容充电电压进行检测,确定发射距离,将控制信号送给发射电路,进而控制弹珠发射。当自动控制时,则利用摄像头进行图像采集,通过调整舵机角度,进行精准定位,确定电容充电电压大小,然后单片机启动储能电路对电容进行充电,再通过电压检测电路反馈电容充电电压给单片机,当达到阈值电压时,单片机控制发射电路,将弹珠发射出去,同时TFT液晶屏上可实时显示充电电压、充电时间、设置距离等信息。
2 理论分析与计算
2.1 电磁炮参数计算
法拉第电磁感应定律是电磁炮的理论基础。当通过闭合导体回路的磁通量发生变化时,导体回路中产生感应电流,感应电流流过的导线在原磁场中会受到一个力的推动,电磁炮就是利用电磁相互作用力把发射的物体加速到高速,最后发射出去[1]。
设驱动线圈脉冲电流为ip,两者之间的互感为M,则两者之间沿线圈轴线方向的作用力为:

由上式可知,为了使弹丸获得尽可能大的作用力F,线圈应与炮膛同轴,绕在炮膛外面,通过支架安装在炮膛底部。在线圈匝数一定的情况下,尽量缩短线圈的分布长度,故用粗导线绕制线圈,减小线圈内阻。
2.2 弹道分析
线圈炮由环绕于炮膛的一系列固定的加速线圈与弹丸构成。它利用加速线圈与弹丸之间互感时产生的电磁力作为弹丸的加速力。当给加速线圈突然加上电流时,在弹丸内会产生相应的感应电流,这时两者相互排斥,弹丸受到的这个排斥力就是加速力。发射时依次给加速线圈供电,于是产生沿炮身管运动的磁场,这个磁场与弹丸中的感应电流激励的磁场相互作用,产生连续的加速力从而使弹丸加速运动。由于加速线圈与弹丸之间的相互作用相当于两个磁体间的相互作用,既可以相斥也可以相吸,可使弹丸加速也可使弹丸减速。因此,必须保正使加速线圈产生的磁力与弹丸的运动位置精确同步[2]。
线圈炮是利用轨道电流相互作用的安培力把弹丸发射出去。实际制作时,线圈炮由一个长为20cm的直塑料管和在其外壁用φ0.8mm漆包线均匀绕400匝总长为60mm线圈组合而成。塑料管底部放入直径为12mm的钢珠作为弹丸。当电容充电电压达到一定值时,按下发射指令键,电容对线圈迅速放电,在线圈周围会产生电磁场,强大的电流会产生强磁场,然后在安培力的作用下,弹丸会以很大的速度射出。
2.3 能量计算
经检测,当对储能元件容值为1000uF充电时,电压达到230V时,直径为12mm弹丸的水平发射距离可达300cm。当电容充电到300V时,水平发射距离可达550cm。
3 电磁炮主要硬件电路设计
由系统总体结构框图可知,硬件电路主要由电磁炮发射电路和单片机最小系统控制电路构成。故下面主要对这两个电路进行介绍。
3.1 电磁炮发射电路设计
电磁炮发射电路如图2所示。
电磁炮发射电路主要由电容充电电路、电容对线圈放电电路和电容充电电压检测电路组成。
当单片机I/O口输出高电平,通过R4使三极管导通,继电器K1得电,常开触点闭合,使NMOS管Q1栅源间得到正向电压,Q1导通,300V直流电压通过R1、D3对电容C1充电,充电电压经取样电阻R6,光耦U2隔离,同相比例放大后,送入单片机监测电压,当C1电压达到一定值时,关断Q1停止充电,同时接光耦U1的单片机I/O口输出高电平,通过光耦使双向晶闸管Q2导通,电容C1对线圈L1放电,使钢珠弹出击中目标。
由上述可知,充电电路主要元件由充电限流电阻R1、大功率开关NMOS管Q1等元件组成,放电电路主要由光耦U1、晶闸管Q2等元件组成,电压检测电路主要由光耦U2、运放等元件组成。
3.1.1 充电电路主要器件的选择
(1)充电限流电阻R1的参数选择[3]
按设计要求电容最大充电时间为5秒,即5τ=5(S)
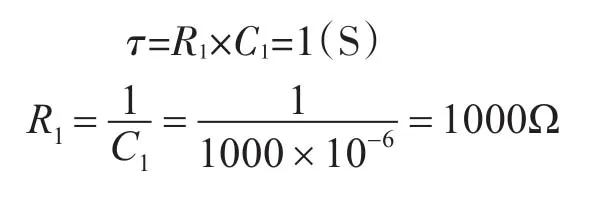
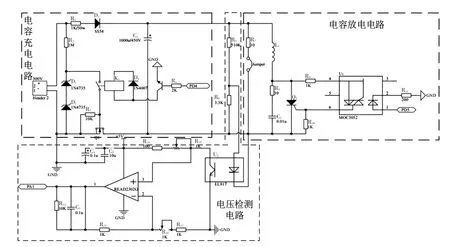
图2 电磁炮发射电路
(2)NMOS管Q1的参数选择[4]
Q1管最大接通电流最高工作电压为300V,故选择用IRF840NMOS管,其Id=8.5A,Vdss=500V,满足要求。
3.1.2 放电电路主要器件的选择
(1)光电隔离光耦U1的选择
为了将高压电路与控制电路隔离,故U1采用双向导通光耦MOC3052。
(2)晶闸管Q2的选择
由于瞬时放电电流达几十安培,最高工作电压为300V,故选用BTA41-600B双向晶闸管,其最大工作电流达40A,最高反向电压700V,满足要求。
3.1.3 电压检测电路主要元器件的选择
(1)光电隔离光耦U2的选择
为了将高压电路与控制电路隔离,获得与电容电压成正比的取样电压,故U2采用线性光耦型号为EL817。
(2)同相比例放大运放的选择
为了将光耦U2采集的电压,不失真的放大,同相比例放大器采用轨道轨运算放大器,其型号为READ2302G。
3.2 单片机最小控制系统电路设计
该控制系统以STM32F103ZET6为核心,控制电磁炮驱动电路、舵机云台、摄像头、TFT显示屏以及矩阵键盘等。PA1读取充电采样信号,PD4发送充电控制信息,PD5发送发射控制信号。单片机最小控制系统电路如图3所示。
4 系统软件设计
系统程序流程包括自动和手动两种控制模式,两者功能之间可以自由切换。CPU读取储能元件充电电压的采样信息,当达到标定值时,发送电磁炮发射驱动信号。由OPEN MV4 H7摄像头可实现目标追踪,获取位置坐标,将获取的坐标信息送至嵌入式芯片STM32F103ZET6,由STM32F103ZET6控制电磁炮驱动系统的线圈电流,决定发送力度及云台舵机的发送角度。系统程序流程图如图4所示。
5 测试仪器与测试数据
5.1 测试仪器
数字双踪示波器、直流稳压源、秒表、卷尺、4位半数字万用表。
5.2 测试数据
测试数据如表1所示。
由表1可知,通过单片机多次调试,将环形靶放置在靶心距离定标点200~300cm间,通过键盘输入距离,电磁炮将弹丸发射至该位置,距离偏差最低≤6cm;还可以在指定范围内给任意靶子位置,用键盘输入定标点距离,一键启动后,电磁炮可以自动瞄准射击,环数最好成绩为10环。

图3 单片机控制系统电路
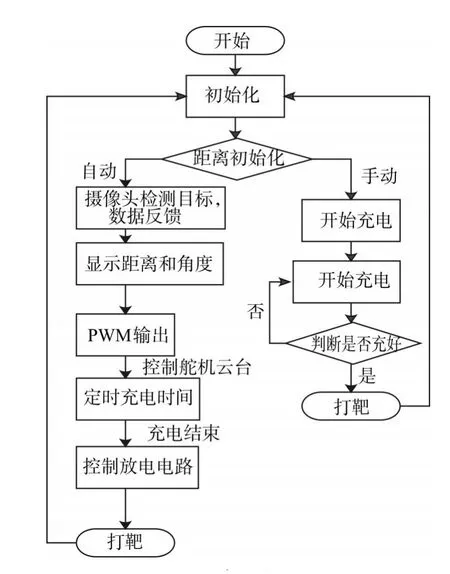
图4 系统程序流程图
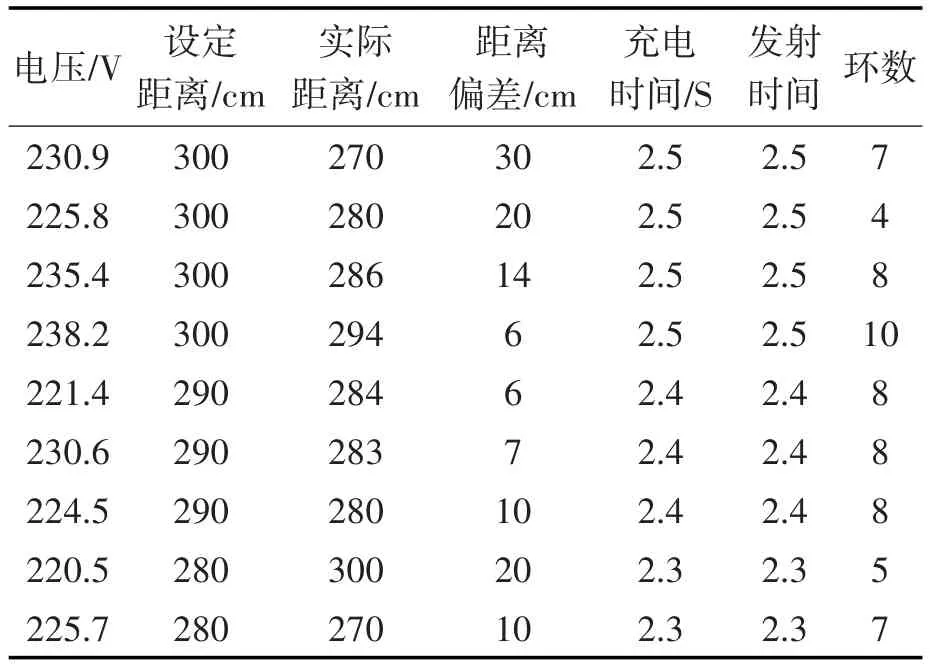
表1 测试数据
6 总结
该装置实现了手动设置发射和自动捕捉目标一键发射,偏差最低在6cm以内,命中率高,还可在液晶屏上显示充电电压、充电时间、设置距离等信息,而且方便轻巧,便于携带。该装置在军事上可以研发作为一种智能型单兵武器,应用于战场,亦可用于天基反导系统和防空系统,可作为反坦克武器,还可以装备炮兵部队、海军舰艇等,同时可以与无人机结合,提高目标打击的灵活性和可靠性;在生活中可用于射钉枪[5]、儿童游乐设备等方面,具有一定的现实意义。