遗传算法在空管监视设备优化选址中的应用研究
2019-09-28潘卫军李肖琳邢瀛月
潘卫军,李肖琳,冉 斌,邢瀛月
(中国民用航空飞行学院 空中交通管理学院,四川 广汉 618300)
1 研究背景
民航空管业务系统主要由通信、导航、监视三类设备及其业务关联构成,可以完成管制通信、飞行引导、目标监视等空管核心业务,是实现空中交通管制自动化、支撑空管运行安全的重要基础。各类空管设备在地理上孤立分散,但由于共同保障航班在空管航路的运行而呈现网络化特征。随着空管业务系统网络化程度的不断提升,在设备故障、自然灾害或人为破坏的影响下,局部区域受损将会导致空管运行安全受到干扰或严重受损,甚至呈现级联失效特性而造成不可挽救的损失。由此,交通运输部提出:提高空中监视能力;实现主要航路航线雷达连续覆盖和繁忙机场的多重覆盖[1]。此外,2016年又提出:加快完善雷达、ADS-B、场面监视雷达及多点定位系统布局,实现自动化系统联网运行[2]。在此背景下,如何规划空管监视保障设备,进一步扩展优化空管监视保障体系,达到全面夯实空管基础设施的目的变得尤为重要。
空管设备规划中对雷达进行配置规划,主要内容包含监视设备的数量、运行维护的成本、安装地理位置、作用范围和对作用空域的覆盖能力等。以往的监视设备配置规划主要是由规划人员的经验或安装维护成本进行选址,通过专家评判法对几个选定的备选厂址进行选取,而忽略了不同种类监视设备的作用范围和覆盖航路重度问题。为了改进传统的选址方法,文中根据航路网构建方式及流量比例对监视设备进行选址配置,保障配置设备的最大作用能力和在应急状态下较高的业务持续性。
文中主要研究中高空管制空域,对中高空管制内监视设备配置进行研究,该区域范围大,且监视设备作用范围受地形影响小便于研究。研究监视设备扩展规划,量化其性能的关键指标是雷达的多重覆盖面积,如何选择合适的站址,对薄弱航路进行最大多重覆盖是关键问题。以西南地区陆基设备作为研究对象,在台站选址的约束条件下,提出以监视设备多重覆盖区域面积最大为目标函数的遗传算法。算例分析结果表明,目标函数在求解过程中变化趋势较明显,说明算法比较合理,对空管监视设备选址有一定的指导作用。
2 空管监视设备优化选址模型
雷达监视设备的选址受多种因素的影响,为了规范监视设备台站的选址,使台站的选址符合运行需求和空中航行服务需求,2014年国内民航局颁布了相应的标准与准则[3],文件中第二部分监视为监视设备台站的选址提供了标准。
2.1 模型假设
(1)由于空管监视设备包括一次雷达、二次雷达、ADS-B等多种类型的设备,模型假设管制空域内不同的监视设备的覆盖范围相同;
(2)这里不考虑高压架空输电线路、高压变电站、金属围栏等干扰物和障碍物对监视设备台站选址的影响,由于雷达采用的是视距传播,所以地面障碍物会对无线电信号存在遮蔽,直接影响雷达的空域覆盖能力。模型假设雷达覆盖范围不受遮蔽角影响;
(3)模型假设H=(h1,h2,…,hk),H为航空器飞行高度层集合,监视设备覆盖范围是最大的作用距离构成的圆;
(4)模型假设不同监视设备天线安装高度相同;
(5)模型假设电磁波在理想介质中传播且作用距离不受功率影响。
2.2 目标函数
目标函数用于判断遗传算法结果的好坏。根据空管陆基保障网络中的情况,该模型以监视设备中心坐标为决策变量,以多重覆盖面积最大和尽量多的保障流量大的航路为模型的目标函数设计遗传算法。
(1)
3 约束条件
3.1 监视设备覆盖半径约束
由雷达工作方式可知,雷达信号覆盖范围由下至上为一个圆锥体,高度层越高,信号覆盖面积越大。由场地选址规划中可知,因雷达场地地形的影响,不同雷达天线高度、不同方位、不同飞行高度对雷达的信号服务范围有影响,雷达视线距离公式为:
(2)
其中,D表示雷达视线距离(单位km);θrs表示最大雷达遮蔽角(单位°);h表示航空器相对雷达的飞行高度(单位m);hθ表示雷达的天线高度(单位m)。
3.2 航段距离约束

(3)
3.3 新监视设备位置约束
假设新的雷达站位置为(X0,Y0),有:
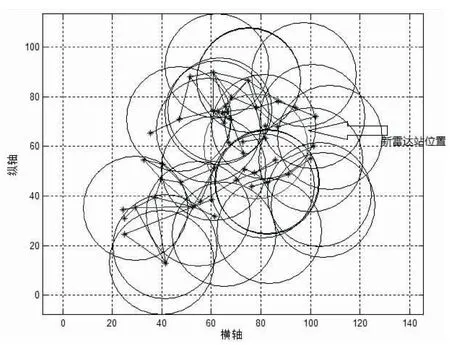
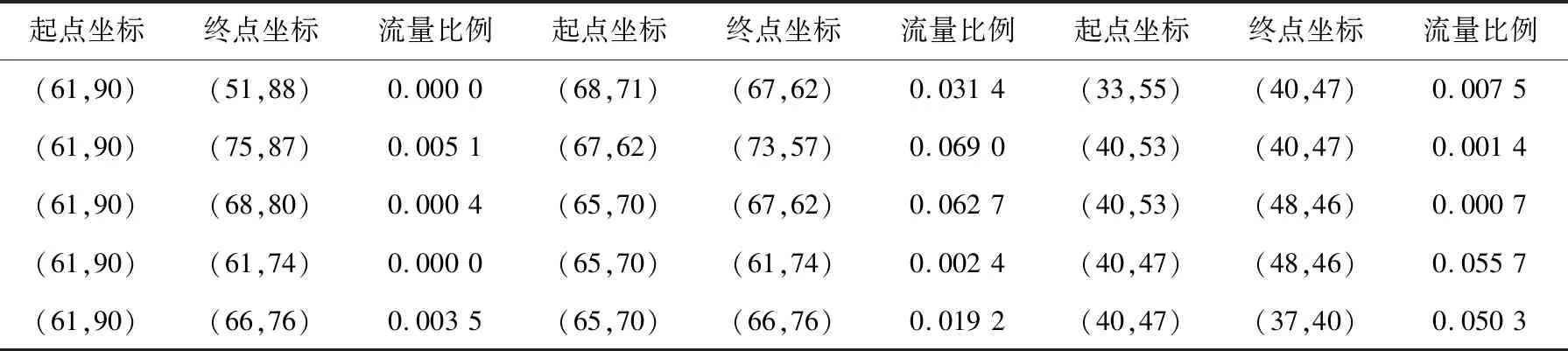
0 (4) 约束为: S=πR2,R≤d (5) 由于选择空域中航段和监视设备都比较复杂,在研究目标函数时求解空间比较大,每次遗传算法求得的新种群都需要计算整个空域的覆盖重度和目标函数,因此存在计算量大、程序运行效率低的问题。目前,对于解决这类选址问题有较多的算法,如粒子群算法[4-6]、蚁群算法[7-9]和遗传算法[10-15]等。遗传算法是按照适者生存和优胜劣汰的原理,在初始种群产生之后,逐代演化出越来越好的近似解的过程。遗传算法相比其他方法的优势在于存在交叉和变异的基于概率的变化过程,适合于求解复杂的优化问题的全局最优解。杨仕明等研究了基于遗传算法的区域雷达台站规划,优化了求解速度[13];曹博等研究了遗传算法在ADS-B监视设备选址优化中的应用[14];赵博等在雷达选址范围、遮蔽角、雷达天线盲区等方面的限制下研究了机场场面雷达的选址[15]。以上研究没有考虑实际选址约束条件或针对特定的监视设备,对一般的监视设备没有通用性。因此,文中提出一种考虑监视设备主要约束条件下的通用优化选址方法。 为提高算法的运行效率,在设计算法时考虑监视设备选址约束条件,以此来规范站址选择的一般性原则。这里设计的遗传算法,首先,对于不满足约束条件的个体进行修正后再计算目标函数,减少了许多不必要的计算。其次,考虑了单个航段可能受监视设备作用范围影响,导致航段的不同部分覆盖重数不同,文中考虑将单个航段按照覆盖重数拆分为多个航段。具体的计算步骤如下: (1)初始化研究空域航路及监视设备台站数据,进行坐标转换,统一坐标系; (2)初始化种群个体,进行二进制编码并判断是否符合坐标约束条件; (3)利用遗传算法模型进行求解,在每一代,根据问题域中个体的适应度大小挑选个体,并借助自然遗传学的遗传算子进行组合交叉和变异,产生出代表新的解集的种群; (4)末代种群中的最优个体经过解码,可以作为问题近似最优解。 模拟适者生存,计算每个个体的适应度,将得到的最佳种群个体插入到下一代最后一个种群中。 (6) 根据适应度函数计算该代种群所有个体U(d)的适应度总和,选择群体个体的概率等于其适应度在种群中所占的比例P(Ai)。 种群中随机产生两个种群个体交叉,再随机产生一个交叉位置,根据交叉概率判定是否需要交叉运算,若需要则将指定交叉位置的二进制数交换位置得到新的种群个体,否则不变。 种群交叉示意见图1。 图1 种群交叉示意 对交叉运算产生的新个体进行变异运算。在二进制数中随机选择一个变异位,根据变异概率产生新的种群个体。新种群个体需要满足雷达站的位置约束。 种群变异示意见图2。 图2 种群变异示意 西南地区设备网络中,导航台与导航台之间存在飞行任务即认为存在航路,不同航路在空域中的重要性往往具有一定的差异性。空域中航段流量作为导航台与导航台之间直接交流的属性,其流量的大小可以直观说明导航台对间的作用强度。 由于西南地区导航台和监视设备都大致位于东经95°-115°之间,北纬20°-40°之间,为了方便计算,提高计算的准确性,需要先将数据进行坐标转换。通过坐标转换可以得到航路和监视设备台站信息,如表1所示。 表1 西南地区航段数据 续表1 由于西南地区地势复杂,无法全面确定雷达设备的遮蔽角,故设定雷达覆盖范围是雷达最大的作用距离构成的圆。雷达天线的高度(海平面高度)约为西南地区平均海平面高度h=500 m。由于单体(或密集)障碍物对台站的遮蔽角垂直遮蔽角要求小于等于0.25°[3],因此假设θ=0.25°,当h=8 900 m时,d=343 km。对雷达的作用半径进行坐标转换,可以得到8 900 m的信号服务半径是21 m。 西南地区雷达数据如图3所示。 (63,75)(62,74)(75,87)(75,87)(47,71)(59,67)(62,92)(41,20)(29,35)(65,25)(40,13)(81,68)(83,46)(61,51)(97,89)(101,72)(108,64)(82,46)(100,55)(81,44)(83,26)(105,36)(104,41)(55,33) 图3 西南地区雷达数据 设置遗传算法种群数目U(d)为60,最大遗传代数Gmax为50。编码方式为二进制编码,染色体长度为14。交叉概率0.7,变异概率0.1。 将不同高度层的监视设备覆盖半径带入遗传算法进行仿真,验证算法的通用性。根据计算结果配置新雷达的坐标二进制编码为10011100111100,是(78,60),如图4所示。仿真结果表明:基于遗传算法的雷达站选址优化算法的运行效率较高,是一种有效的监视设备台站的选址方法。 运行结果如图5所示。可以看出,计算结果趋于稳定,目标函数结果基本不变,说明算法收敛效果较好,算法设计良好,符合航路监视设备多重覆盖要求。遗传算法大概经过十几次迭代就已经收敛到最优解了,可见遗传算法拥有很强的收敛性。对于大型数据问题,遗传算法有着先天的优势。 在西南地区空管保障设备的基础上,提出了遗传算法的相关理论,建立监视设备多重覆盖的目标函数,并用遗传算法对设计模型求解。通过采集的空管航线的航班流量、导航台站点位置和空管监视设备等数据,用Matlab软件模拟验证模型的合理性。从理想环境的空域角度,按监视设备满足多重覆盖为设计目标的遗传算法,有助于空管保障体系的优化。 图4 西南地区8 900 m巡航高度的新雷达台站选址示意 图5 8 900 m巡航高度遗传算法的种群适应度3.4 监视设备的作用范围约束
4 算法设计
4.1 选 择

4.2 交 叉

4.3 变 异

5 实 例
5.1 数据准备


5.2 参数设置
5.3 仿真结果
6 结束语