基于DSP的交流伺服电机驱动器的设计
2019-09-25李天奕向荟羽沃松林倪福银
李天奕 向荟羽 沃松林 倪福银
摘要:交流伺服电机控制系统是一种新型的调速系统,该系统具有良好的运行、控制及经济性能,显示出巨大的发展潜力。基于DSP的交流伺服电机驱动器的设计,选择芯片TMS320F2806作为主控芯片,设计电流检测、位置检测、驱动电路、保护电路等模块,并通过CCS软件平台设计电流采样、换相等各模块程序,实现驱动交流伺服电机的软件设计。经过软硬件的联调,实现通过DSP驱动交流伺服电动机的功能。经测试,交流伺服电动机运行稳定,可用于工程实践。
关键词:交流伺服电机;TMS320F2806;电机驱动器
随着现代工业的发展,电动机作为机构执行装置,一直在现代化生产和生活中发挥着十分重要的作用。作为重要的电机之一伺服电动机及其伺服控制系统广泛应用于各个领域。无论是数控机床、工业机器人、办公自动化等领域,都离不开伺服电动机及其伺服控制系统[1-4]。
对于交流伺服电机的控制器,目前主要有微处理器(MCU)、专用集成电路(ASIC)、数字信号处理器(DSP)等三种方式[5-8]。由于微处理器处理能力有限,不适用于控制复杂、实时性和精度要求高的场合,而专用集成电路使用时灵活性较差,受限制多。因此,DSP的发展成为主流趋势[9,10],它提供高度专业化的指令集,可对输入输出數据进行高速处理,使得在控制器的规则实施、矢量控制等方面具备独特优势,特别适用于诸如交流伺服电机实现电压电流双闭环控制调速等场合[11-12]。
利用TI公司推出的高性能、低价位的DSP芯片TMS320F2806,设计电流检测、位置采样、驱动电路、保护电路等模块,并通过CCS软件平台设计电流采样、换相等各模块程序,实现驱动交流伺服电机的软件设计。该驱动控制系统电路设计简便,可靠性高,并且可以根据工程需要通过调整软件设计应用到多种场合。
1 交流伺服电机的系统硬件设计
该交流伺服电机的驱动系统的硬件是以TI公司生产的TMS320F2806作为主控芯片,包括IGBT逆变电路、驱动电路、相电流检测电路、系统保护电路、人机界面设计以及电源模块设计等,整个硬件系统的结构如图1所示。
1.1 电流检测电路设计
电流检测电路由霍尔元件、运算放大器和A/D转换器组成,电路原理如图2所示,电流反馈采用型号为CS010GT的霍尔传感器。
1.2 位置采样电路设计
位置信号采样是通过交流伺服电机本身自带的霍尔元件来检测的,由于霍尔元件是集电极开路输出,其输出信号经过上拉电阻得出位置方波信号送到DSP的CAP端口,进行位置信号的捕捉,电路原理如图3所示。
1.3 驱动电路设计
驱动电路设计采用美国国际整流公司生产的专用驱动芯片IR2110,共采用3个IR2110,从而实现对控制电路的驱动功能,电机控制器驱动电路如图4所示。
1.4 系统保护电路设计
系统保护电路由图5所示,电流检测电阻 R71送出的信号接入 IR2110的过电流检测输入端 SD,当主驱动电路发生过流或直通时,SD 端电压高于 0.5 V,IR2110 内部保护电路使其输出驱动信号全为低电平,从而使被驱动的功率管全部截止,保护功率管,还将低电压信号传到 DSP 芯片的 TICTRIP引脚,复位 DSP 芯片,封锁脉冲的输出。
2 交流伺服电机控制策略设计
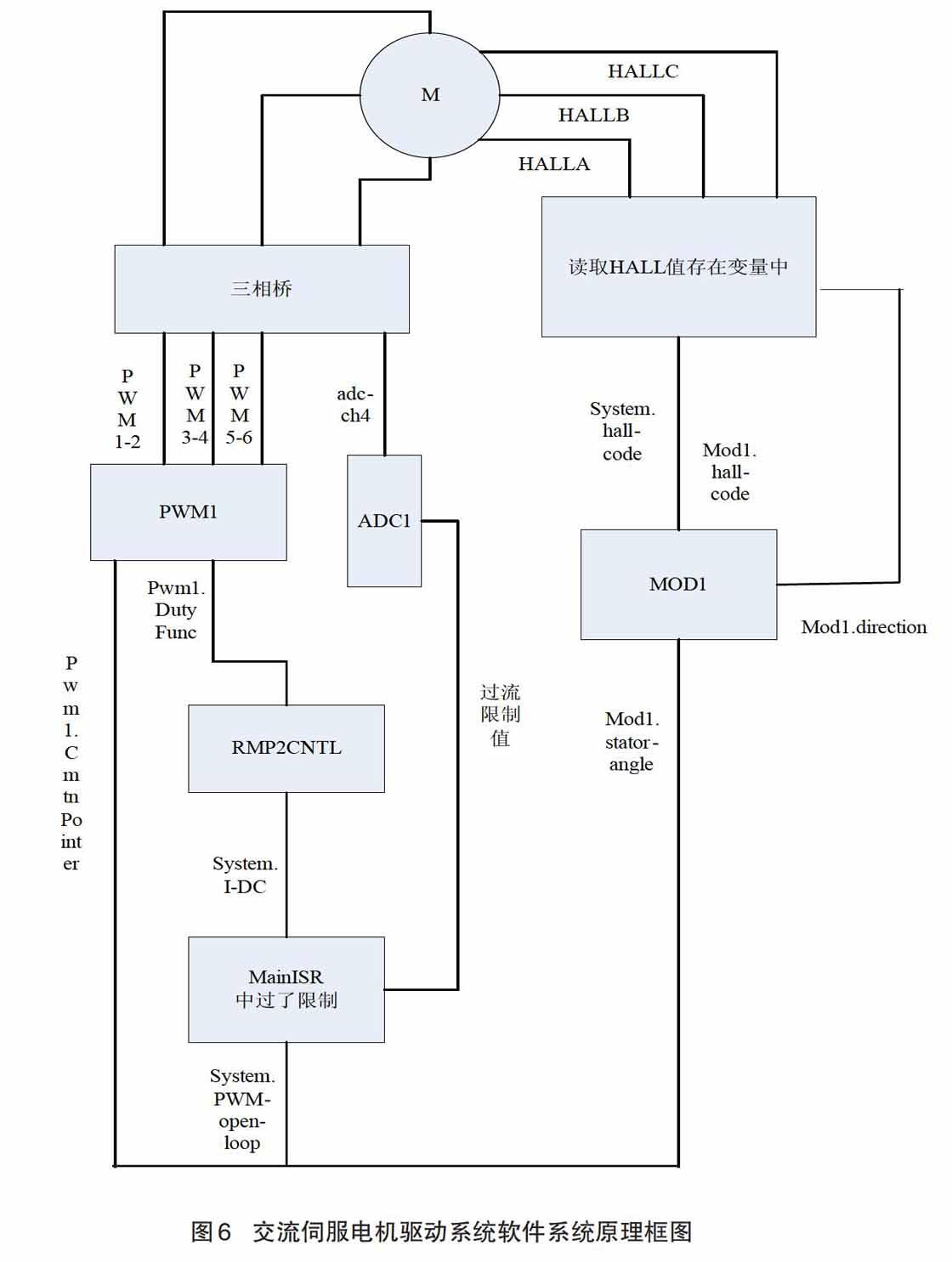
基于DSP的交流伺服电动机控制系统中,交流伺服电机驱动系统软件设计原理如图6所示。
(1)通过DSP的I/O口读取HALL信号,存放于system.hall-code变量中。system.hall-code这个变量赋给MOD1模块mod1.hall-code, system -direction(电机转向)变量是自己设定的。MOD1模块处理上述两个变量,产生mod1.stator-angle(定子磁场角度)变量的输出。
(2)MOD1模块的mod1.stator-angle(定子磁场角度)变量输入给pwm1.CmtnPointer(输出定子磁场角度)变量与pwm1.DutyFunc(输出脉宽)变量。经过PWM1模块运算通过PWM1-PWM6输出给三相桥,驱动电机运转。
(3)ADC检测三相桥的电流,经过除去最大、最小值再平均的算法,得到电流值,在不过流的情况下,直接把system.PWM-open-loop赋给system.I-DC然后经过RMP2模块,将要输出的脉宽斜坡加上去。
2.1 电流采样程序
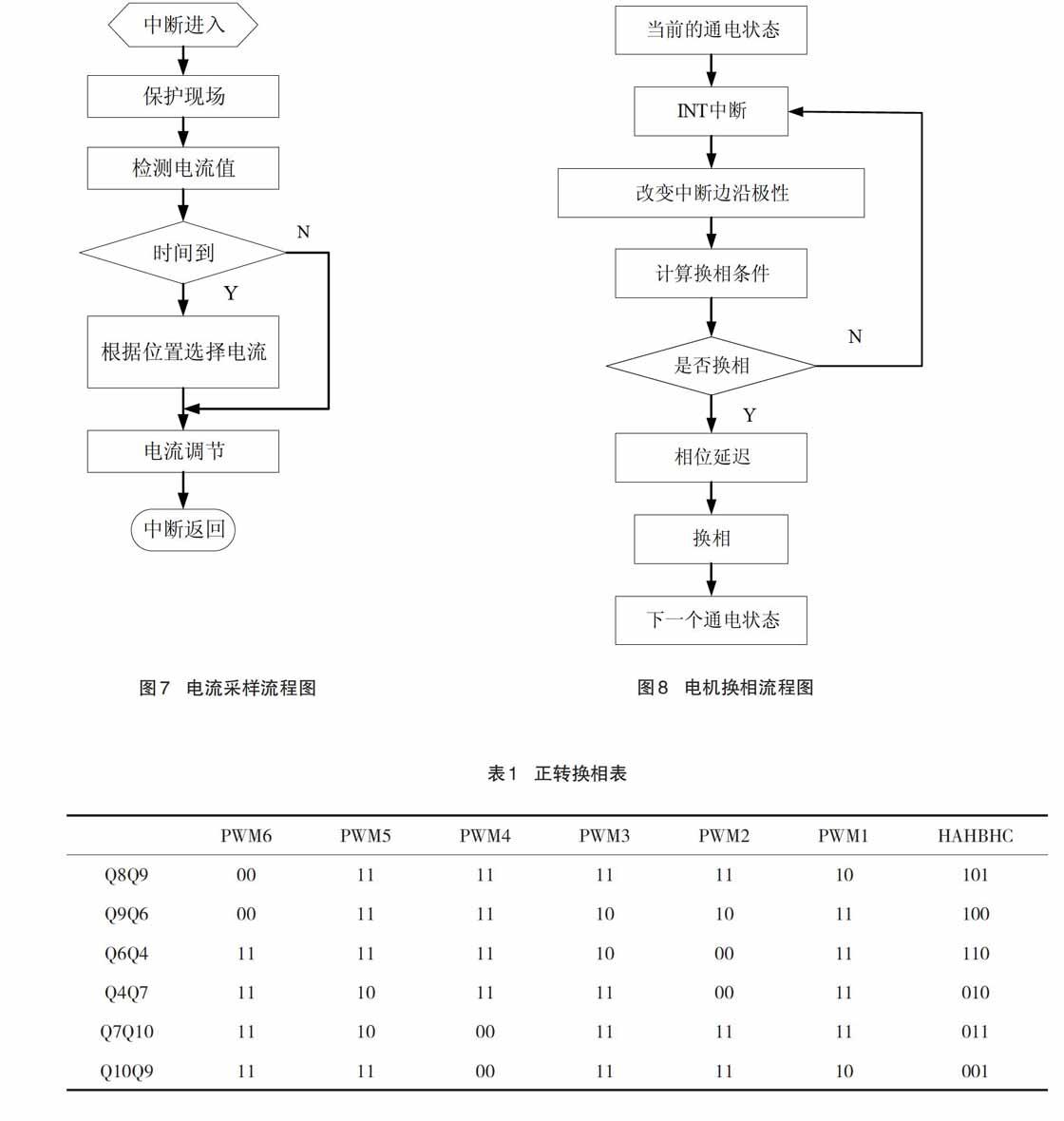
在该系统中,电机运行时,对于每路转子位置信号和电流调节的周期是异步的,根据当前逆变桥的导通情况,选择适当的相电流作为电流调节器的反馈量,完成电流的调节作用流程如图7所示。
2.2 换相设计
换相模块就是通过读取霍尔位置中断捕捉模块中的霍尔信号获取电机转子位置信号,确定逆变器功率管的开关状态。电机换相流程如图8所示。
由于每一个霍尔传感器都会产生180°脉宽的输出信号,三个霍尔传感器的输出信号相差120°相位差,这样它们在每转过360°电角度中共有6个上升或下降沿,正好对应着6个换相时刻,可得出电机转子霍尔位置状态与逆变器功率管的导通关系,如表 1 所示,反映了电机正转所对应的PWM状态。
将DSP设置为双沿触发捕捉中断功能,就可以获得这6个时刻。通过设置CAP1-CAP3 为I/O功能查询捕获单元位置信号的输入引脚获得转子位置信号,根据此信号值查表1计算换相程序偏移向量,调用相应的换相PWM子程序,从而通过改变PWM方式控制寄存器ACTRA的值来控制PWM输出信号的改变,实现电动机的换相,然后恢复CAP1-CAP3的捕捉功能。
3 运行结果分析
3.1 驱动电机调试
先将编写好的程序烧录到DSP中,手工调试电机,可以看到转动6格后HALL值开始重复,记录这6格HALL值的顺序,看是不是623154或者451236,如果不对,则交换连根电机输入到驱动板上的HALL信号线,再用同样的方法测试,直到调试正确。检测结果如图9所示。从数码管显示结果可以看出电机与驱动板连接正确。
3.2 电机运行及结果分析
在电脑上运行 CCS 3.3 软件,通过 DSP 专用仿真器连接 JTAG 对 DSP 进行仿真。用示波器检测DSP输出端口的PWM波形,通过观察发现该波形为调节脉宽的方波,与理论相符合,如图10所示。
当电机正常运行时,PWM输出端的指示灯为全亮状态。该驱动控制系统有2种调速方法:(1)通过按键调节脉宽的输出值。可观察脉宽输出值对电机转速的影响。(2)通过调节输入到电机上的直流稳压电源的值的大小来调节电机的转速,电压越大电机转动速度越快,但不能超过电机的额定电压值。根据检测结果分析,该设计实现了DSP驱动交流伺服电机的功能。
4 结语
近年来,随着电机技术及其相关学科的发展,交流伺服电动机以其良好的调速性能、可靠性强和使用寿命长等突出优点,在工业控制的各个领域得到了迅速发展。本研究主要以TI公司高性能、低价位的DSP芯片TMS320F2806为主控芯片,设计电流检测、位置采样、驱动电路、保护电路等模块电路,并通过CCS软件平台设计电流采样、换相等各模块程序,实现驱动交流伺服电机运行。运行结果表明,该驱动控制系统电路设计简便,可靠性高,并且可以根据工程需要,通过调整软件设计应用到多种场合,具有很好的工程价值。
参考文献:
[1] 黄敏高,龚仲华,王芳.工业机器人驱动系统现状与展望[J].机床与液压,2018,46(3):79-83.
[2] 张燕红,王摇磊,吴摇璇,等.基于 ARM 的高性能交流伺服电机系统设计[J].微特电机,2018,46(5):14-16.
[3] 王淑娴,彭东林,吴治峄,等.伺服电机位置检测技术综述[J].仪器仪表学报,2018,39(8):143-153.
[4] 卢琳.基于TMS320F2812的交流伺服电机控制器[D].上海:上海交通大学,2007.
[5] 周亞芹,李维嘉,赵勇刚.交流伺服电机驱动器的优化控制研究[J].武汉理工大学学报,2012,34(12):130-133.
[6] 刘东,余志平,杨延西.基于DSP的无刷直流电动机无传感器控制系统设计[J].电机与控制学报,2002,6(1):29-33.
[7] 陈佳桂.永磁同步电机伺服驱动控制器的研制[D].广州:广东工业大学,2008.
[8] 莫会成,闵琳.现代高性能永磁交流伺服系统综述——传感装置与技术[J].电工技术学报,2015,30(6):10-21.
[9] 韩安太,刘峙飞,黄海.DSP控制器原理及其在运动控制系统的应用[M].北京:清华大学出版社,2003.
[10] 纪志成,金小俊,沈艳霞.DSP在无传感器无刷直流电机控制中的应用[J].微电机,2001,34(5):29-32.
[11] BRAIER Z,KLOUCEK P. System of measurement and evaluation of AC servo motor's mechanic, electric and control quantities [C]. 2015 IEEE International Workshop of Electronics,Control,Measurement, Signals and their Application to Mechatronics (ECMSM), 2005:1-5.
[12] DARIUSZ J. Sensorless control of permanentmagnet synchronous motor based on unscented Kalman filter [C]. International Conference on Power Engineering, Energy and Electrical Drives, 2011: 1-6.
Abstract: The AC servo motor control system is a new type of speed control system with good operation, control and economic performance. It has great potential for development in the future. The article studies the design of AC servo motor drive based on DSP. The chipset TMS320F2806 is selected as the core chip, and the modules schematic such as current detection, position detection, driving circuit, protection circuit are designed. In addition, the design of AC servo motor drivers software such as current detection, commutating phase are programmed through the CCS v3.3 software. Finally, the function of AC servo motor drive is achieved by the alignment of hardware and software. According to the test, the system can operate stably and can be used into engineering practice.
Key words: AC servo motor; TMS320F2806; motor drive
责任编辑 张志钊
