基于实时图像处理的运载火箭飞行特征事件判别方法研究
2019-09-25
(西昌卫星发射中心,四川 西昌 615000)
0 引言
随着科学技术的不断发展进步,嵌入式系统、通用计算机的性能飞速提升,实时高性能图像处理技术、高精度网络时间等相关技术已逐步趋于成熟。
目前,在运载火箭飞行过程中,对助推器分离、级间分离等关键特征事件的发生情况(以下简称特征事件),主要通过处理接收到的火箭遥测数据来判别。在助推器分离、级间分离时,因爆炸螺栓起爆等因素影响,经常会导致遥测信号失锁或误码率升高的情况,直接影响遥测数据的接收,有时会影响到部分特征点遥测参数的正常解算。光学测量作为外弹道测量的主要手段之一,能全程记录目标飞行过程,直观展现目标飞行特征事件的发生情况。通过实时图像处理及特征判别,可快速获得目标特征事件,为指挥决策提供有力支撑,也可作为遥测参数判别特征事件的一种有效补充。
本文提出了基于实时图像判别运载火箭特征事件的思路,从图像传输、获取、预处理、图像判读方法等方面进行了阐述。
1 特征事件判别现状
在航天发射中,对运载火箭飞行特征事件的判别,普遍以遥测数据为主要依据,通过对遥测时间指令参数的实时解算与判断,来确定特征事件是否发生。以某型系列火箭发射为例[1],主要特征事件及主要参考遥测参数如表1所示,通过遥测参数的处理能够获取较为全面的特征事件。

表1 某型系列火箭飞行特征事件及判断依据
由表1可知,在助推器分离时间的判别上,选取了0Tf1、0Tf2、0T3f、0T4f、0Tg2、0Tg1等遥测时间指令参数作为判断依据。在飞行过程中,因分离时发动机火焰、爆炸螺栓起爆冲击波等因素影响,时常引起遥测信号失锁,导致高误码率而无法正常解算出某些表征特征事件遥测参数。如某次任务中,0T3f等时间指令未能正常解算。
在航天发射任务中,为保证稳妥可靠、避免出现误判,在特征事件判别时,通常采用延时综合判断方式,通过判别多个遥测参数来综合确定特征事件的发生,因而特征事件最终判别结果要比实际事件发生要晚3-5秒,通过牺牲实时性的方法来保证判别的可靠性、正确性。
在航天发射任务中,如果地面光学测量设备布局合理,能够为指挥员提供从点火起飞直至大地遮蔽的所有弧段的实况跟踪测量图像,通过实况图像,指挥员能够直观分辨的所有特征事件,如助推器分离、一二级分离、拋整流罩、二三级分离等,但目前实况图像在特征事件判别上仍没有得到很好的应用。
2 基于图像的特征事件判别流程
2.1 图像传输与获取
目前,通过光学测量手段获取的实况图像,主要用于航天发射的现场指挥与监视,并作为事后精度分析的主要依据[2]。根据任务跟踪测量需要,将光学设备布设在不同地域站址,满足全程光学测量要求。光学设备可通过多个光学敏感元件获取火箭飞行的实况景象,通过图像传输设备(如视频光端机)将实况图像传送至指挥控制中心(以下简称指控中心),再通过电视中心(如视频矩阵等)将实况图像分发给各级指挥员,供指挥决策使用。
实时图像判读系统在电视中心后端接入,实时获取光学设备实况图像,将实况图像进行实时处理,通过快速视频判读的方法,获取助推器分离、一二级分离、二三级分离等特征事件,并配以较为准确的NTP网络时间,通过任务IP网络向指控中心发布特征事件发生的时间,作为遥测特征事件处理结果的备份,并佐证遥测时间指令处理的正确性。实时图像判读系统部署如图1所示,系统信息流图如图2所示。
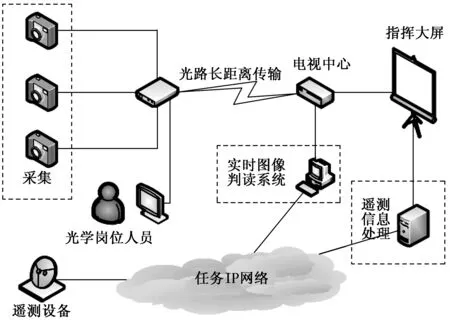
图1 实况图像传输及处理系统部署图

图2 实况图像传输及处理信息流图
光学设备图像传输及处理信息流向:
1)光学设备端,负责运载火箭跟踪测量,实时获取运载火箭飞行实况图像,将实况图像进行视频分配和格式转换,通过视频光端机向指控中心的电视中心发送。
2)电视中心,负责实况图像的接收、解码、格式转换、视频分配、视频切换等工作,将视频图像送指控大厅使用。
3)实时图像判读系统,通过电视中心视频分配获得一路光学实况图像,实时接收并存储实况图像,实时判读运载火箭飞行特征事件,并实时获取任务IP网的NTP时间,将特征事件发生时间发布给中心实时数据处理、指挥显示等系统。
2.2 特征事件判别流程
实时图像判读系统实时获取光学实况图像,实时判读实况图像,判别是否发生特征事件,如未发生则继续读取下一帧图像,并实时记录目标大小和数量,当目标大小发生了急剧变化,可判定为发生了特征事件,通过NTP时间为当前事件配时,发生了特征事件时,将配时结果通过网络发送给目标系统。详细流程图如图3所示。
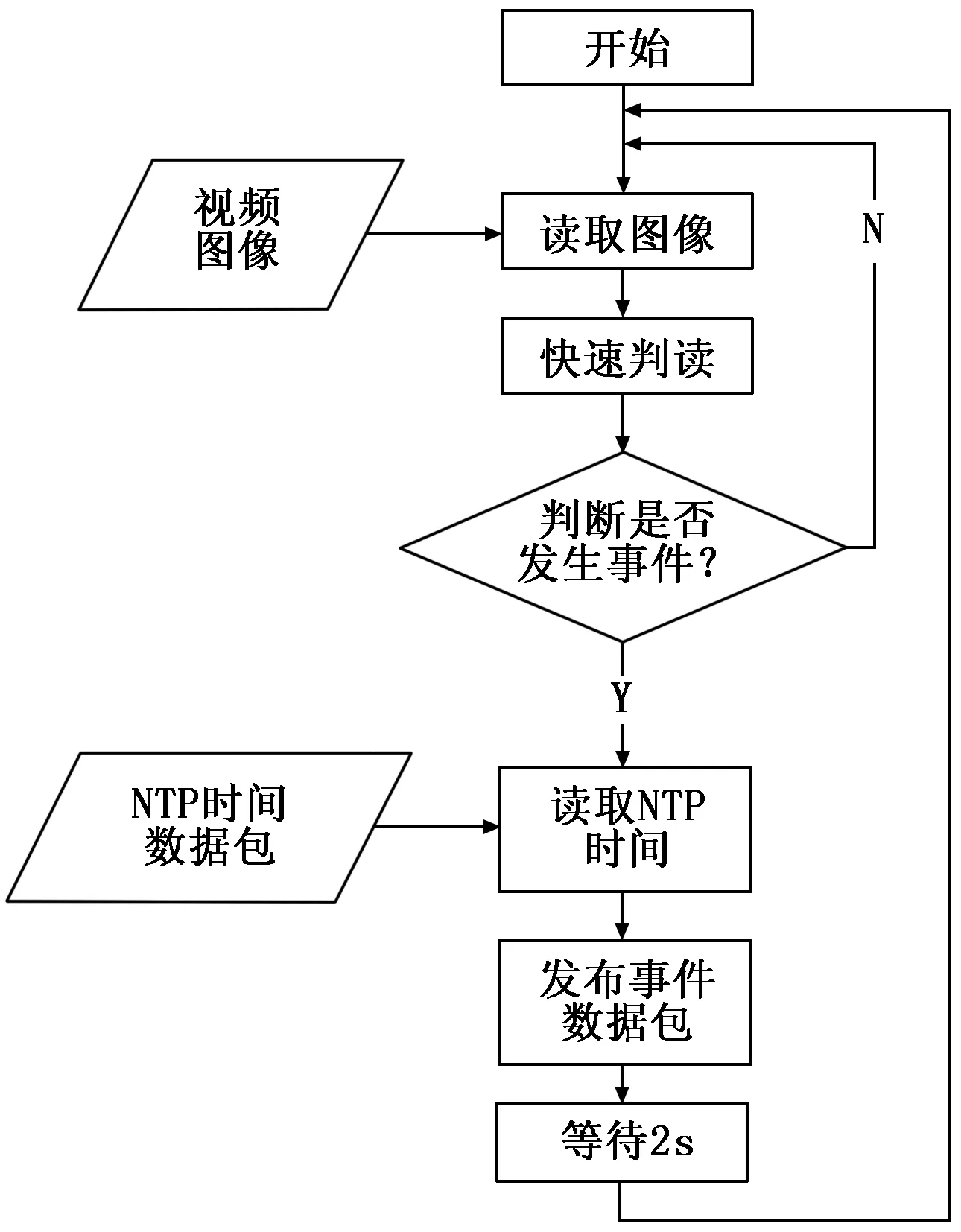
图3 实况图像处理流程图
3 基于图像的特征判别方法
以某次航天发射任务某型光学设备(以下简称A设备)为例,在助推器分离(约141 s)时,A设备距离目标约87.1 km,在一二级分离(约159 s)时,A设备距离目标约128.1 km,在二三级分离(约344 s)时,A设备距离目标约813 km。其他光学设备如B设备、C设备等距离目标相比A光学设备更远。就目标成像而言,在相同的天气条件下A设备相成像效果更佳,但因为目标相对较远,光学设备成像为点目标。
图4、图5为某次任务的光学设备实况图像,从中截取了部分图像发现,在助推器分离、一二级分离时,对于光学设备均为点目标信息,在分离过程中有着相同的特性,即点目标先变大,然后又变成二个或多个小目标。

图4 运载火箭助推器分离过程
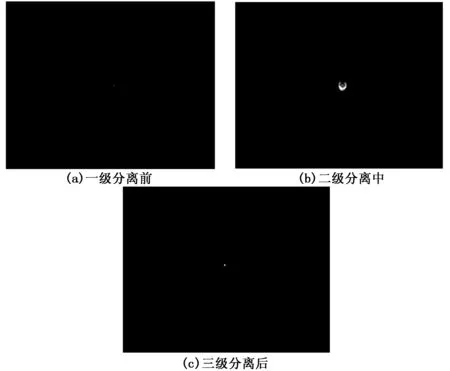
图5 运载火箭一子级分离过程
3.1 目标特性
当运载火箭飞行距测控设备一定距离后,运载火箭在光学设备上成像为点目标。对于点目标,采用以下模型:
点目标孤立于背景,在灰度分布上表现出奇异性,即目标亮度高于(或低于)背景。因此,点目标可以用光学点扩散函数表示[3]:
(1)
其中:f(x,y)为目标强度,τ为目标的强度幅值,δx、δy为目标在x,y方向的宽度。
3.2 图像预处理
对于点目标的图像预处理,可采用局部背景平滑和局部阈值化[4],如图6所示。
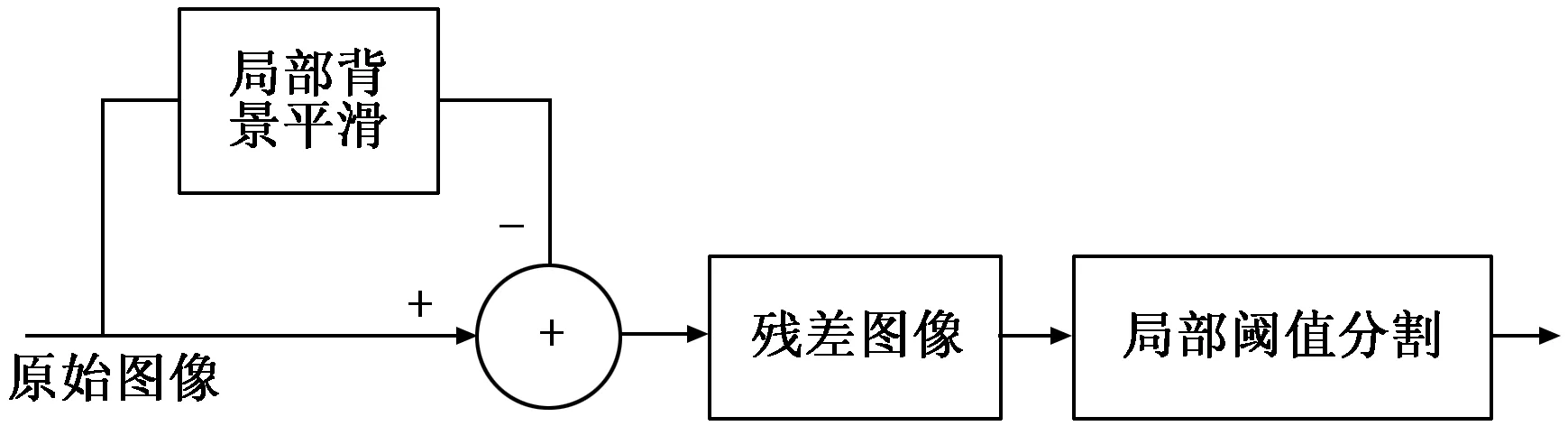
图6 图像预处理框图
采用数学形态学滤波实现局部背景平滑。闵可夫斯基(Minkowski)结构和差运算,即形态和、形态差(膨胀和腐蚀)是数学形态学的基础[5]。
对于图像f(x,y)的形态和、形态差,定义如下:
令F、G⊆E2,f(x,y)为属于L2(R)紧支的灰度函数,f:F→E,结构元素为g(i,j),g:G→E,那么灰度图像函数的形态和、形态差分别定义为:
形态和:

(2)
形态差:

(3)
形态和、形态差实际上是在定义域内的极大、极小运算。
形态和、形态差的复合运算成为形态开和形态闭。对于图像f(x,y)形态开、形态闭,定义如下:
形态开:
γg(x,y)=f∘g[f·g(x,y)]
(4)
形态闭:
φg(x,y)=f·g[f∘g(x,y)]
(5)
形态开和形态闭对图像具有一定的平滑功能,能够检测出图像中的奇异点。形态开能够消除图像中的边缘毛刺和孤立斑点,而形态闭能够填补图像中的漏洞以及裂缝。图像中的边缘、漏洞和孤立点都是图像中的奇异点。
采用γg(x,y)和φg(x,y)的平均值来表示图像f(x,y)的平滑图像h(x,y),即:
(6)
运用形态开即可实现局部背景平滑。原始图像f(x,y)与平滑图像h(x,y)的差e(x,y)表示了空域高频部分,其中包含了可能目标。
e(x,y)=f(x,y)-h(x,y)
(7)
对残差图像e(x,y)进行局部阈值分割,经过门限处理后就得到一个去除了背景噪声的可能目标图像序列。
形态开滤波在计算量上占绝对优势。形态开按照Minkowski分解可以将二维运算转化为一维运算,减少了计算量。数学形态学滤波器的滤波效果取决于结构元素的形状、尺寸和方向,选取的参考标准是目标的大小、形状和方向。点目标在结构上表现为各向同性,结构元素应选为各向同性,并且大小为点目标尺寸的两倍为宜。
通过MATLAB对图4中的助推器分离过程的3幅图像进行预处理,得到如图7所示的处理结果。
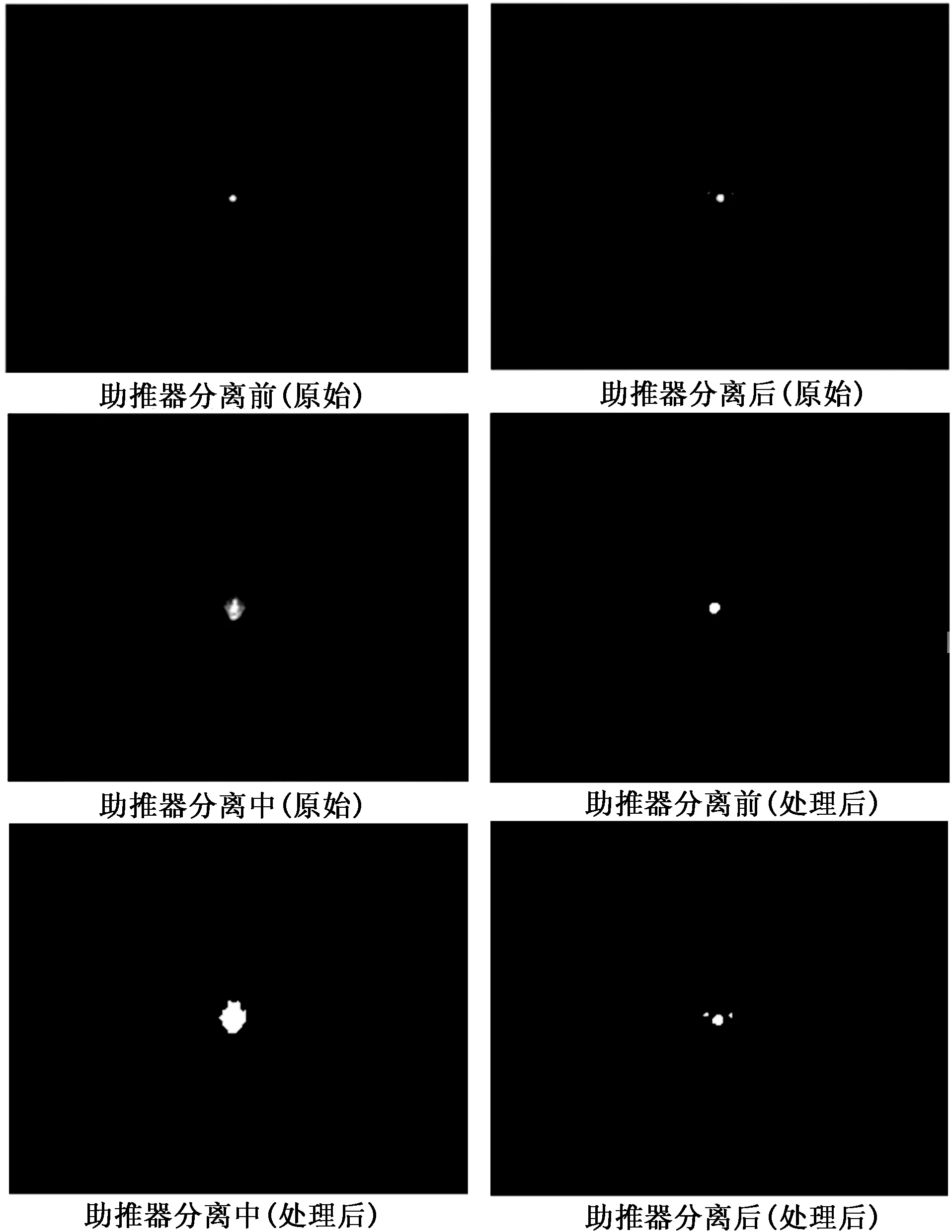
图7 助推器分离过程预处理结果
3.3 特征事件识别与判别
特征事件识别与判别就是在图像预处理的基础上,对点目标进行有效检测,利用多帧图像中目标的运动信息,将目标的运动特征和运动轨迹的连续性和一致性综合考虑,实现目标自动跟踪。在自动跟踪的基础上,采用成熟的图像判读方法实现特征事件的判别。
图像判读采用两种方式同时进行综合判断。一是采用实时计算当前目标的像元数,来判断目标的大小变化,当前帧图像中目标大小与上一帧图像中目标大小发生了急剧变化时,可判定发生了特征事件。可选用适当大小的模板,采用模板匹配方式实现自动目标跟踪和判读,在合适大小的模板内快速判断目标的大小。二是分析目标的个数作为辅助判断,当目标发生大小变化后,目标个数发生变化,也可确定发生了特征事件,模板选取时充分考虑多个目标成像问题。
通过MATLAB对图4~5预处理后的图像进行目标像元数统计,详细统计结果如表2所示。

表2 目标成像大小统计结果(单位:像元数)
从表1可以看出,助推器分离前目标成像大小为143个像元,分离中目标成像大小为950个像元,分离后目标成像大小为199个像元,表面分离过程中目标成像大小发生了激烈变化,可作为发生特征事件的判断依据。
为了实现对实况光学图像的实时判读和处理,满足每秒不低于25 Hz的处理频率,提高系统处理视频图像的实时性,可考虑采用并行处理系统对实况图像进行处理,选用多个处理器并行处理和多流水线处理的高速硬件,如基于数字信号处理器(DSP)开发的嵌入式视频处理专用板卡。
视频判读的过程:摄像机送来的模拟信号经视频采集单元转换为数字信号存入采集VRAM。DSP将VRAM中数字图像存入动态RAM中,同时对这些图像进行实时处理。处理过程中的数据暂存在动RAM中,最终的处理结果存入显示VRAM中,将处理结果发送至IP网络。
虽然系统能够实现对运载火箭特征事件的判别,但也存在以下几点不足。一是目前仅适用于夜间目标成像的处理,对白天目标成像的处理不够稳定。二是系统无法自动对特征事件进行有效识别,无法自动分辨是什么特征事件。尤其是飞行过程中如出现云层遮挡等天气原因将导致实况图像不连续,系统无法判别和对应当前发生的特征事件,需要与理论飞行时序结合起来进行综合判断,需要下一步重点改进。
4 系统性能分析
网络时间协议(NTP,Network Time Protocol)是一种基于UDP的时间同步协议[6-7]。时间同步的准确度依赖于时钟源硬件的准确度和网络传输延迟的概率统计分布[8-9]。航天发射场使用了高精度铷原子钟,时间准确度能够得到保证,影响NTP时间的准确度主要因素为网络传输延迟。经过分析,航天发射场NTP的时钟同步精度普遍优于10 ms。
光学图像的拍摄帧频在25~250 Hz之间,为了实现标准传输,统一采用了25 Hz的AV格式进行传输,其时间间隔为40 ms。因此用优于10 ms的时间给每40 ms一帧图像进行配时,可以满足实时图像判读要求,可实现特征事件在50 ms的精度量级。
如果需要进一步提高系统精度,也可考虑将实时图像处理系统部署在测控设备端,直接获取光学实况图像并进行处理,可减少网络传输、数据转换的时延,同时采用高精度B码终端配时(同步精度优于10 μs),可将系统处理精度提升至优于5 ms量级。
5 结束语
结合当前遥测方法判别特征事件中存在的不足,本文提出了基于实况图像实时判读方法判别特征事件的思路,分析了基于实况图像处理的特征事件判别流程和方法,并对系统性能指标进行了简要分析,为更加可靠判别运载火箭特征事件提供了新的方法。
