基于ARMA模型的液体火箭发动机实时故障诊断方法研究
2019-09-25
(北京航天动力研究所,北京 100076)
0 引言
液体火箭发动机是在极端物理条件下运行的复杂热动力学系统,其故障的发生和发展具有快速性和破坏性。发展可靠的发动机故障诊断系统,对发动机工作过程中出现的故障予以预警和判断,并及时采取有效措施,避免由于发动机故障而引起重大的事故。因此世界航天大国对故障诊断技术及应用越来越重视。
重复使用的液体火箭发动机要求具备故障诊断系统,该系统利用传感器获得系统相关的数据信息,借助各种智能算法和模型来评估系统的健康状态,在故障发生前进行预测,在故障发生后结合相关的资源信息提供切实可行的维修保障措施最终实现系统自身的视情维修。该系统中几个关键技术如下:发动机敏感参数的选取和测点优化技术;实时故障诊断算法设计及应用技术;准确的故障定位技术。
国外非常重视液体火箭发动机故障诊断技,美国在此方面的研究和应用比较成熟,其过程大致分为3个阶段。初级阶段:始于20世纪70年代初美国对一次使用发动机进行了关键参数上下限制,开创了健康监控技术在液体火箭发动机领域的应用先例。其中以SSME[1,7]工作参数“红线阈值检测与报警”系统为代表。但该类系统方法相对较为简单,功能也比较单一。中级阶段:Rocketdyne公司研制并实现了用于SSME地面试车监控的SAFD方法[2,4](System of Anomaly and Fault Detection)加强了红线阈值监控的检测能力。80年代末期以来又相继提出了健康监控系统HMS[5](Health Monitoring System),在故障模式、故障诊断算法、故障控制措施、专用传感器技术等方面进行了大量的研究工作。20世纪90年代Rocketdyne公司研制“SSME试验后自动化检测与诊断系统”[9-10],采用模块化设计,包括通用模块和专用模块,可批量处理数据。高级阶段:2005年10月25日,美国国家航空航天局斯坦尼斯航天中心成功进行了航天飞机主发动机试验,发动机点火试验时间为520秒[3,11]。此次试验验证了先进健康管理系统。
国内20世纪90年代初就有很多学者进行液体火箭发动机故障诊断方面研究。研究比较全面的有国防科技大学吴建军[12-13]团队,进行了多种故障诊断算法及建模研究。针对液体火箭推进系统的各种故障检测与诊断方法进行了系统分类和详细评述。
综上所述,国内液体火箭发动机健康管理技术的应用还处于起步阶段。涉及到的诸多关键技术尚未完全成熟。液体火箭发动机健康管理系统正朝着自动化、智能化、综合化程度不断提高的方向演变和发展。本文就液体火箭发动机开展实时故障诊断算法设计,采用了基于ARMA模型进行故障诊断,构建了故障模型进行故障的模拟,最后通过仿真分析对算法进行了考核,结果满足实时故障诊断系统的需求。
1 基于ARMA模型的故障诊断
1.1 ARMA模型概述
ARMA(Autoregressive moving average)自回归滑动平均模型[15]是最为经典的时间序列分析方法,ARMA模型的表达式如式(1)所示。该方法最主要的特点是利用已建立的ARMA模型对系统未来的行为进行外推预测。重点关注单个传感器参数值在时间块上的行为,是信号结构的变化。时间序列分析采用参数模型对所观测到的有序的随机数据进行分析与处理的方法,它研究有序的随机数据序列内在关系与规律,不需要知道系统的输入和动态过程特征,而是根据输出数据序列内在的规律性来研究系统的特征。所关注的不是测量值,而是短期内将要发生的数据与刚刚发生过的数据的结构相似性。这种时间序列模型的使用有一个重要的前提,即模型对象系统需要是一个稳定的状态。
(1)
其中,p、q、为自回归阶数和滑动回归平均阶数;bi、ci是自回归阶数参数和滑动回归平均参数;zk为时间k上的传感器参数,rk为时间k上的偏差。因此主要问题就是明确式(1)中的各项参数。
在训练ARMA模型的过程中对训练数据的长度有一定的要求,训练数据的长度不宜过长,因为数据过长容易造成模型训练的困难,也就是说低阶模型对于大量的数据会存在无法表示的情况;数据长度若过短,便不能完全表示出数据的特征,也会使模型的训练存在不能广泛使用的可能性。因此,数据长度的选择需要通过大量的试验来确定。
1.2 ARMA模型建立
ARMA模型适用于处理和分析平稳时间序列数据,建立ARMA模型的过程如图1所示,其过程有数据的平稳性判断、模型识别、模型定阶、模型参数估计和模型验证,
模型的定阶和参数估计关键参数确定的方法[12]如下:
1)ARMA模型训练模块分为两个部分,第一部分是计算公式(1)中的p、q值,此部分的确定相对来说比较困难,常用的有AIC准则和BIC准则,这里采用了AIC准则进行定阶。
2)当模型的阶次确定后确定后,需要对模型中的参数进行估计,此部分相对来说简单一些,这里采用最小二乘法法进行参数估计。
这部分训练工作针对每一路传感器参数独立进行,即有多少输入传感器,就训练多少个ARMA模型。
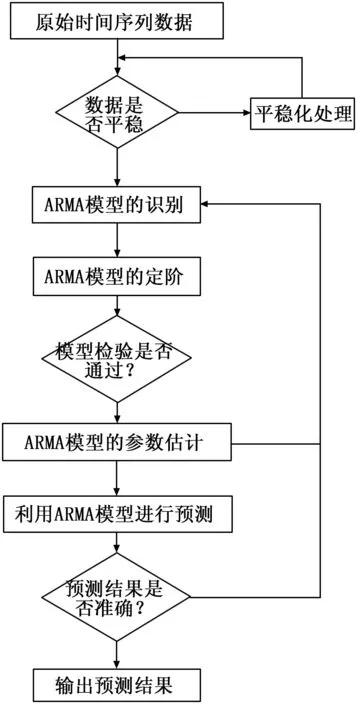
图1 ARMA模型建模流程
1.3 基于ARMA模型的故障诊断设计
液体火箭发动机稳态工作状态其传感器参数稳定在一定的动态范围内,在正常工作状态下,传感器采集到的测试参数会在稳定的范围内变化,该变化是可预测的。若有发动机的故障产生,传感器测试参数则会超出稳态工作范围。ARMA模型在故障诊断上的应用也有很多学者进行了研究,本文主要从实时诊断的需求出发,是发动机稳态工作下故障诊断的有利手段。
发动机故障诊断的测试数据包括温度、压力、速度、振动等类型的信号,针对不同的工作阶段采用不同的测量参数进行状态监测。选取重点的几个测点采用ARMA模型对训练数据进行建模。当有新的测试数据时,可以通过该模型进行预测。然后采用适当的方法进行诊断。
ARMA算法使用的前提是假定预测的数据是稳定的,同时认为发动机的试车数据与真实的发动机工作数据是基本一致的。采用发动机正常试车数据值建立ARMA模型,该模型用于发动机状态的预测。预测值与发动机试车的数据进行比对来进行故障的预测和分析。诊断原理如图2所示,例如:在地面状态下装订好一组正常数据,同时训练好ARMA模型,在实际的飞行中发动机真实的测量值作为ARMA的输入,进而预测出下一时刻的值,这个值与预先装订的试车数据进行比对得出残差,这个残差和门限值进行比较进而可以判断出发动机的故障和趋势,能够提前发现和预警故障。诊断流程如图3所示,诊断步骤如下:
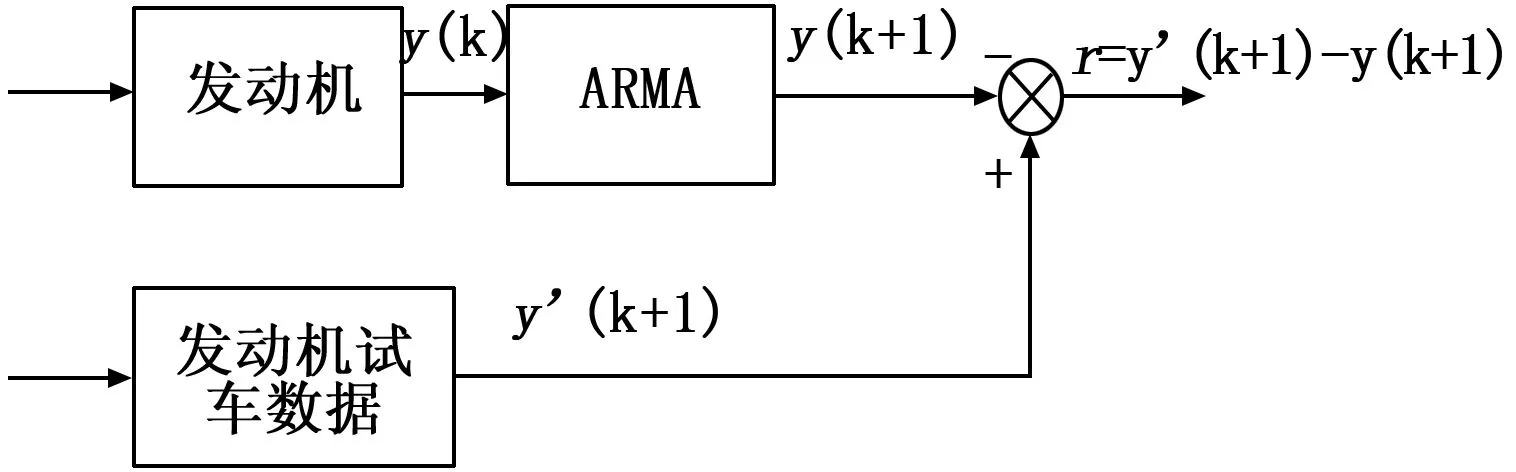
图2 ARMA模型诊断原理图
第一步,对传感器测量参数进行预处理。将输入数据减去其平均值,以消除每个不同产品间存在的差异,保留数据特性。
第二步,根据训练数据集进行ARMA模型建模。有几个传感器信号就训练几个模型。
第三步,将被测数据带入建好的ARMA模型中,该模型利用被测的时间序列数据中的前几个数据,预测即将产生的数据。
第四步,将预测值与输入的试车数据相比较,得到残差数据。
第五步,残差应该在门限值范围内,若超过门限值范围则产生警告。
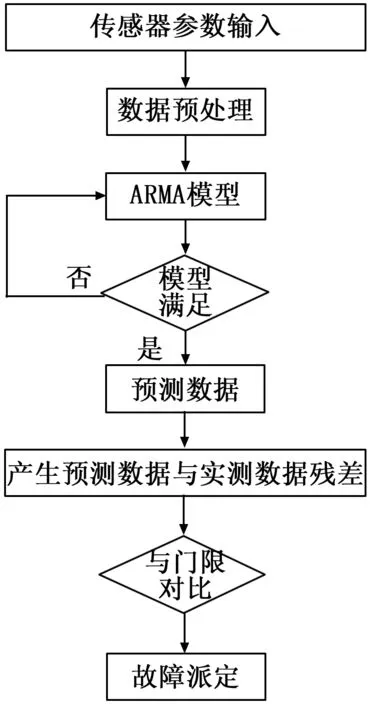
图3 ARMA模型的诊断流程
2 仿真分析
2.1 故障模型
重复使用液氧甲烷发动机采用燃气发生器循环,泵压式供应系统,该发动机的最大特点是采用了故障诊断系统,能够满足整个工作过程中发动机的状态监测、故障诊断等。本文基于Mworks平台开发了一套发动机故障模型,该模型可模拟20余种发动机常见故障,支持了发动机系统图形化、模块化的建模功能。发动机故障仿真模型见图4所示,详细的设计及仿真分析见文献[6]。
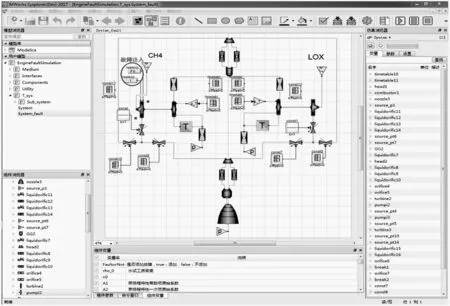
图4 液氧甲烷发动机故障模拟
2.2 ARMA诊断分析
本项目用于诊断ARMA模型预测的传感器信号如表1所示。
在训练阶段采用正常的仿真数据进行训练,在simulink平台下搭建的训练模型如图5所示。训练后得到4个ARMA模型,每个模型对应一个传感器信号,训练数据与ARMA模型的对比如图6所示。通过图6所示可以看出来训练数据和ARMA模型的吻合程度。满足了诊断的后续使用需求。
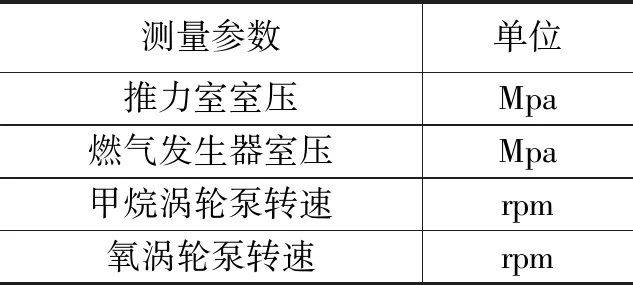
表1 用于ARMA模型预测的传感器信号
在发动机主级工作的情况下加入故障,故障类型是甲烷涡轮泵转子破坏故障,当发生这类型故障时,相当于甲烷涡轮的功率降低,而在不变的负载情况下,甲烷涡轮的做功能力降低,因此发动机的关键参数均会下降,由于整体做工能力的降低,氧涡轮泵转速也会下降,但是比甲烷涡轮泵要慢一些。
通过上述的故障分析,可得表1中四个传感器的值均会发生变化,由图2所示的诊断原理可以看出:当发动机出现故障后ARMA的输入是带有故障的信号,ARMA模型进行预测和运算结果必然与提前装订的试车数据产生的残差会逐步的增大,图7所示是采用了ARMA进行预测并与试车数据进行对比得到的残差值,由图可见四个传感器的通道均报警,图中显示的残差均大于门限值,同时给出了诊断出故障的时间。
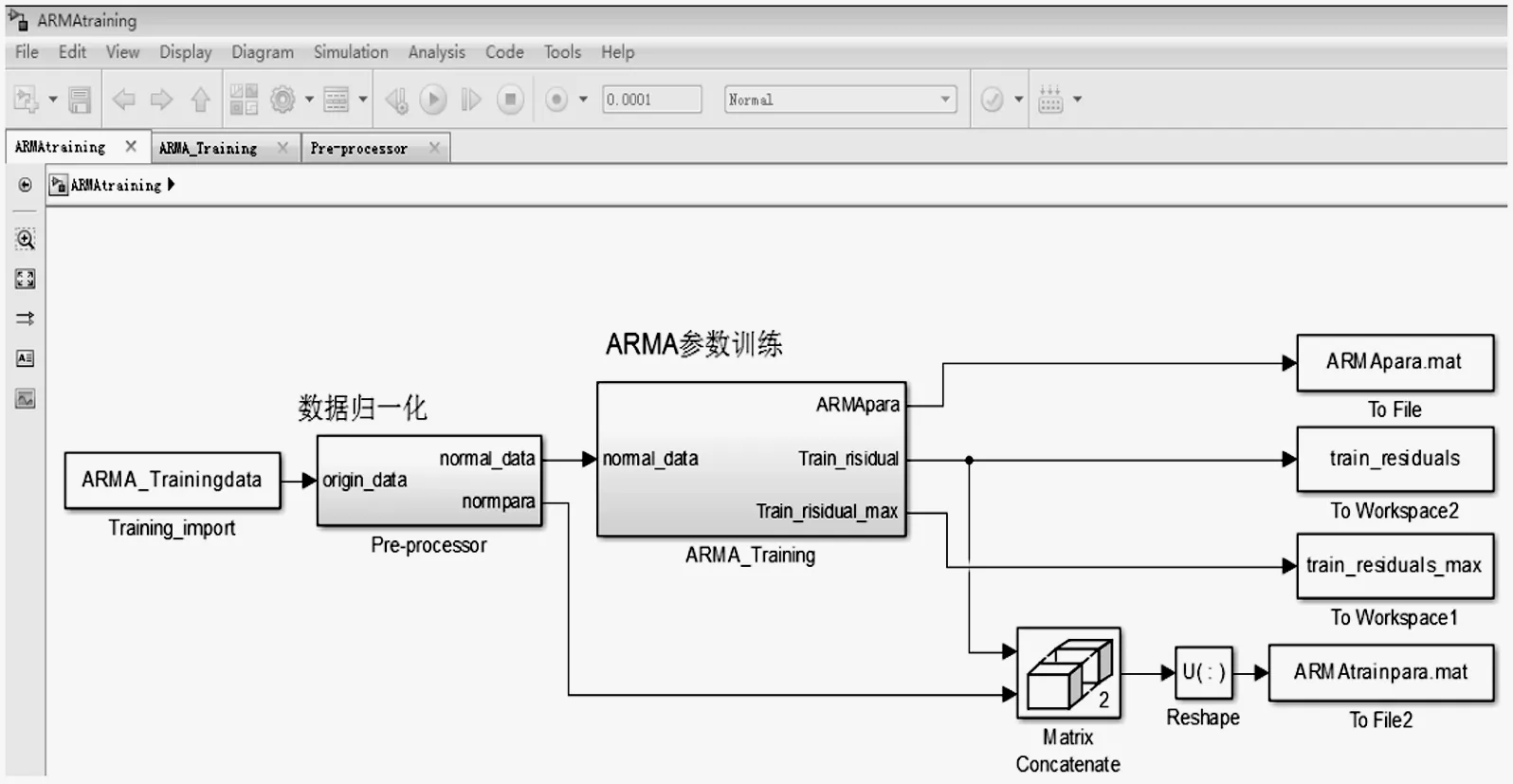
图5 在simulink环境下训练ARMA模型
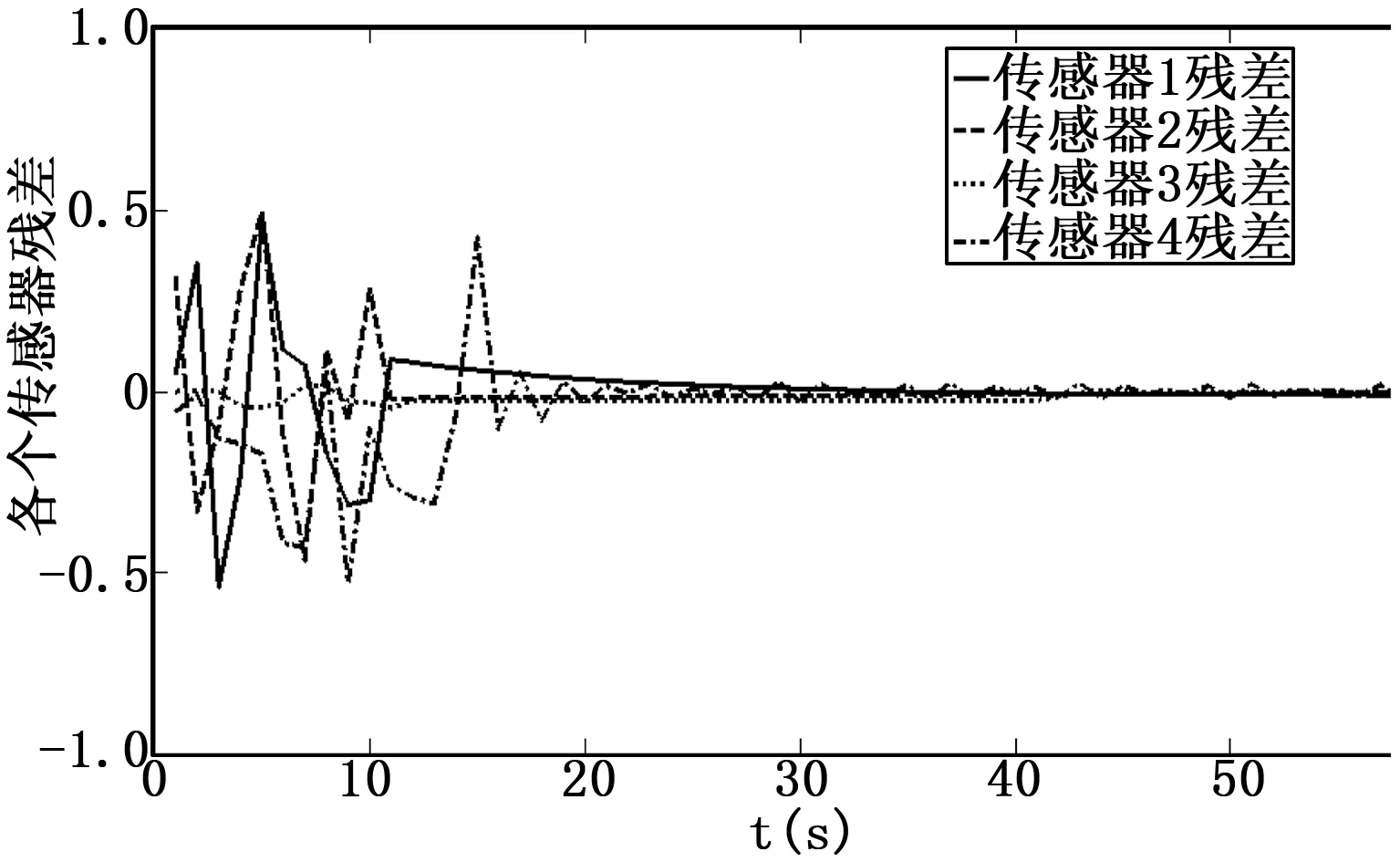
图6 训练数据与ARMA模型的对比图

图7 采用ARMA模型进行诊断分析图
3 硬件在回路平台测试
硬件在回路仿真技术是伴随着自动化系统的研制及计算机技术的发展而迅速发展起来的,由于发动机系统的实物试验代价高昂,而硬件在回路仿真技术能为故障诊断系统的研制、试验提供最优的手段,缩短发动机故障诊断系统试验研制的周期,节省大量的试验经费。硬件在回路仿真系统是以实时处理器运行仿真模型来模拟被监测对象的运行状态,通过接口与实时故障诊断系统产品实物连接,进一步验证软硬件的有效性,该仿真测试已经成为系统开发流程中的一个重要环节。
仿真平台的工作原理:首先,在主工作站中建立故障诊断仿真模型,包括发动机实时故障诊断模型和故障诊断算法模型,并进行数学仿真。模型仿真结果满足设计要求后,在模型中加入与箭体仿真机、故障诊断器通讯的硬件板卡实时接口模块,进行自动生成代码生成,通过主工作站仿真软件下载到实时仿真机。发动机仿真机通过运行下载好的发动机故障模型计算出发动机工作过程的各项参数,并根据这些参数输出相应的机理信号,进入对应的信号模拟器。模拟器产生与传感器检测结果相同的电信信号并反馈至故障诊断器。故障诊断器接受到传感器信号后进行发动机状态预测、判断及故障诊断等,并将计算结果通过422和1553B通讯方式分别于控制器和箭体控制器仿真机通讯,并等待控制器的反馈指令。同时,将输出反馈给发动机仿真机进行新一轮的计算,构成仿真回路。
本文构建的硬件在回路平台主要有三部分组成:主工作站、发动机仿真机、故障诊断器仿真机,主工作站实现对仿真过程的控制,主要任务包括三部分:硬件在回路实验前完成故障诊断算法设计和发动机故障模型的建立,并执行自动代码生成,通过以太网完成链接、下载;验证过程中,通过外部模式对故障器仿真机和发动机仿真机进行实时监控、在线调参和数据记录。上位机界面可以通过拖拽模块的方式进行搭建,方便操作。通过开展发动机实时故障诊断系统硬件在回路仿真试验,对实时故障诊断系统(含故障诊断算法、故障诊断器等)进行了综合试验验证。特别地考核了故障诊断器在实际工作中的诊断算法运算能力、采集速度、通讯等性能,故障诊断算法诊断性能,以及整个实时故障诊断系统的有效性。构建的发动机实时故障诊断系统硬件在回路仿真上位机显示界面,如图8所示。由图8可见该平台可以满足模型训练、故障诊断,故障时间的显示等一些关键的参数,通过硬件在回路的平台测试能够进一步的验证故障诊断算法的有效性。
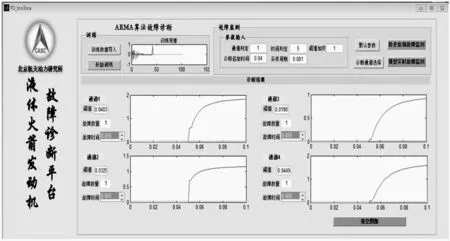
图8 基于ARMA模型的硬件在回路故障诊断分析界面
4 结论
本文重点针对液体火箭发动机设计了实时故障诊断算法并通过仿真分析验证了算法的有效性。首先,建立了液氧甲烷发动机故障模型,通过此模型可以获得发动机的几种典型故障数据;其次,设计并开发了ARMA模型,最后,基于ARMA模型设计了实时故障诊断系统并进行了仿真分析,通过仿真分析可见该算法成功的诊断出发动机的常见故障,并进行了报警,满足了发动机故障诊断系统的需要。
