基于雷达及北斗定位的车内防遗监测系统设计
2019-09-25
(1.中北大学 仪器科学与动态测试教育部重点实验室,太原 030051; 2.山西省北斗导航与位置应用协同创新中心,太原 030051; 3.泉州职业技术大学,福建 泉州 362000)
0 引言
近年来,全球发生多起高温天气下儿童被滞留于车内中暑、死亡的惨剧。据统计,2018年将近52个儿童死于车内高温的情况,自1998以来,将近有800名儿童死于车内中暑事故[1]。对于此类安全问题,解决途径包括宣传教育及技术手段[2],技术方面主要通过车载终端监测并通过无线通信发送短信或APP进行报警[3,4],车载终端中常见的有红外检测,采用声光报警和车窗升降[5],但人体红外辐射易受遮挡,且红外传感器一般放于固定位置,无法穿透及辨别塑料、衣物等物体且容易受热源、光源干扰,环境温度和人体温度接近时,探测和灵敏度下降;有采用压力传感器或电容传感器设计的儿童安全座椅[6],但是坐姿不正确容易导致传感器工作不正常且安全坐椅体积大;有采用声音检测及常闭震动检测人员滞留[7]、采用有机物传感器车内环境监测,但容易受车内高温、周围声音及震动影响。
针对上述问题,本设计使用毫米波雷达和北斗定位技术,融合多传感器检测算法,实现了车辆运动检测、车内人员状态及车内环境实时监测,对解决儿童滞留车内的安全问题有重要的现实意义。
1 车内监测原理及系统方案
1.1 监测原理
通过分析引发车内遗留人员安全问题发生的实际情况及其对人员监测系统的实际需求,本系统采用FMCW体制的MIMO雷达人体探测技术监测车内人员的状态。人体目标探测技术主要是对人体生理参数的检测与提取,人体微动、呼吸及心跳都能作为微多普勒特征[8]。FMCW体制的MIMO毫米波雷达可发射调频连续波信号,在车内环境中,毫米波雷达发射的信号不受衣物、温度等条件的影响,可用来测量出目标的距离、速度和角度,由于人体微动与车内其它物体和车外的物体运动、车体震动回波信号不同,可将其与外界干扰区分开。监测原理如图1所示。
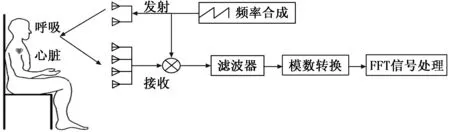
图1 雷达探测原理
1.2 系统总体方案
系统分为车载终端和上位机测试软件。车载终端主要完成对车辆运动状态信息、车内人员状态信息、车内环境信息的采集、处理和上传,上位机测试软件主要完成对车载终端进行功能配置、监测状态的显示及报警功能的显示,车载终端和上位机之间采用串口通信或4G通信模块进行传输,系统总体结构如图2所示。
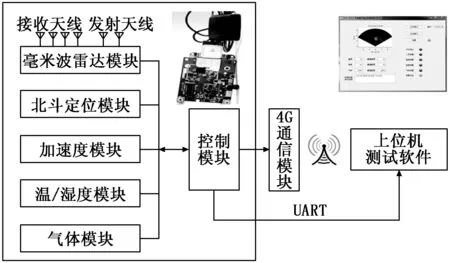
图2 系统总体框图
1.2.1 车载终端方案
车内防遗监测系统车载终端主要包括多传感器监测前端、控制单元、通信单元。如图3所示,其中多传感器监测前端分别由雷达天线、雷达收发模块、北斗定位模块、加速度传感器模块、温/湿度传感器模块、气体传感器模块组成;通信单元采用现有4G通信模块。
车载终端工作流程为:终端使用STM32作为主控,首先接收上位机的配置指令,然后对传感器进行读写操作、读取加速度传感器信息及北斗模块的位置信息,再启动雷达模块、温度传感器、气体传感器进行信号采集及数据分析,并将处理后的数据通过串口或4G通信模块上传到上位机,上位机再对数据进行显示。

图3 车载终端硬件系统框图
1.2.2 测试软件方案
车内防遗监测系统测试软件用于对系统功能进行测试及演示,功能包括3个部分:车载终端参数设置、下位机信息的解析、信息实时显示,软件整体框架如图4所示。
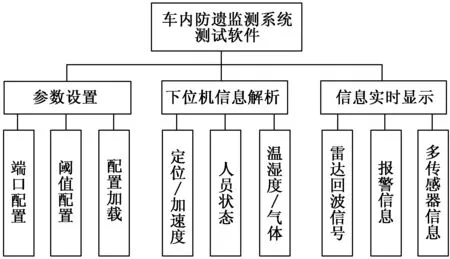
图4 上位机测试软件框架图
参数设置包括端口配置、阈值配置及配置加载,该部分用于对车载终端的各传感器的报警阈值及雷达信号的调制方式、采样精度等参数进行配置;下位机信息解析主要用于测试车载终端上传的各传感器信息;信息实时显示部分主要包括雷达人体回波动态显示、多传感器数据实时显示、报警信息显示。
2 车载终端硬件电路设计
2.1 毫米波雷达模块
毫米波雷达信号不受外界高温影响,且可穿透衣服、塑料等物品,因此选用毫米波雷达用于对车内人体多普勒信息进行探测,本系统采用TI公司的AWR1642雷达传感器设计,该传感器具有内置PLL和模数转换器,集成了发送器、接收器、基带和AD,且集成了DSP子系统和基于ARM R4F的处理器子系统,能实现77 GHz的FMCW雷达载波信号发射、接收以及信号处理,传感器功能框图如图5所示[9]。
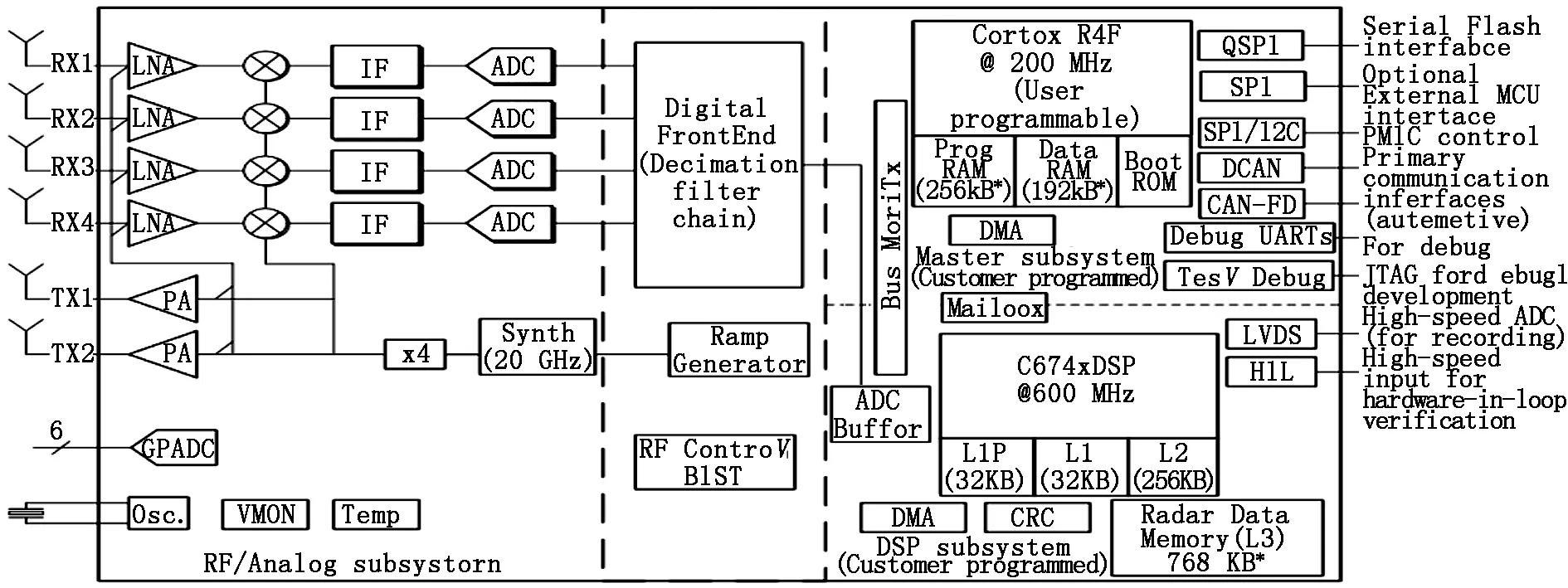
图5 雷达传感器功能框图
使用基于AWR1642雷达传感器搭建毫米雷达前端,外围电路不需要过多外设,布局阶段要注意发射与接收隔离开来,还要尽可能将射频信号传输线的路径减小到最小,布线时需要注意将射频信号输出线阻抗控制在50欧姆,传输线的设计使用ADS的linecalc计算。参考数据手册设计出的外围电路主要部分如下。

图6 雷达传感器电路图
2.2 北斗定位及加速度模块
监测系统的汽车运动状态监测及定位功能主要采用北斗定位及加速度模块实现。北斗定位模块选用东方联星的定位芯片CC50-BG,芯片体积较小,支持B1和L1双频点,且为标准NMEA0183数据输出[10]。该芯片速度精度为0.1 m/s,位置精度3m,结合加速度模块可准确得到车辆运动信息及定位信息,其外围电路如图7所示。

图7 北斗定位芯片电路图
加速度传感器模块用于精测车辆运动状态,本设计使用MPU-6050传感器,其内部集成3轴陀螺仪和3轴加速度计,可将加速度和旋转运动以及航向信息组合成一个单一的数据流用于应用,具有体积小,精度高等优点[11],适用于小体积、高精度运动测试环境中。其外围电路如图8所示。
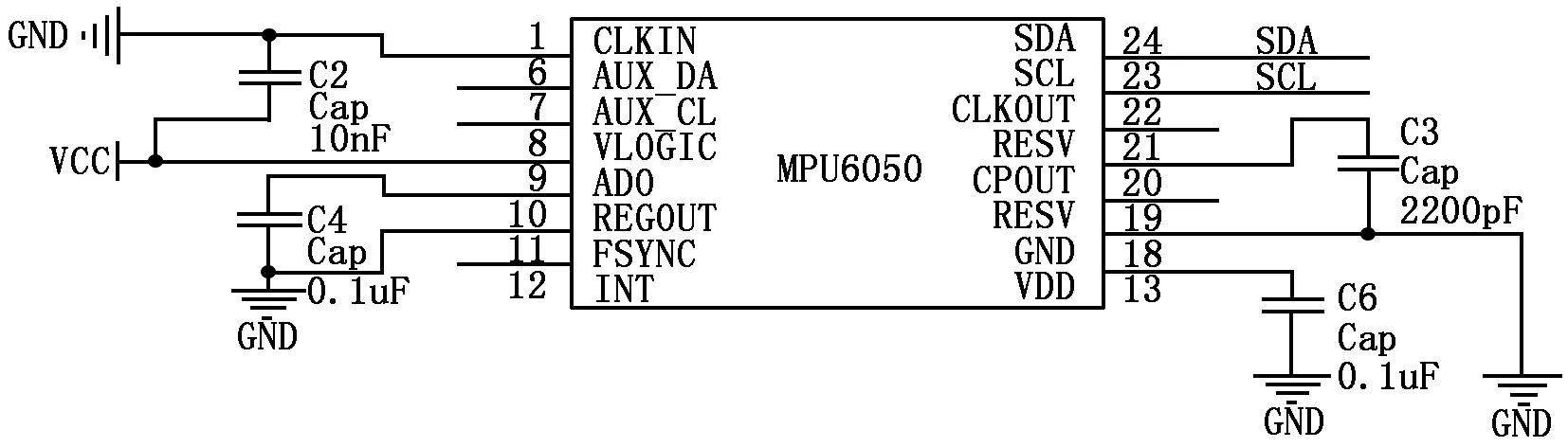
图8 MPU6050电路图
2.3 温/湿度及气体模块
温/湿度模块使用HDC1080传感器,这是一款带有集成温度传感器的数字湿度传感器,可在极低功率下提供出色的测量精度,HDC1080相对湿度的测量范围是0~100%RH,分辨率为0.03%RH,精度是±2%RH;温度的测量范围是-40~125 ℃,精度是±0.2 ℃[12]。其外围电路设计如下图所示。

图9 温湿度传感器电路图
气体检测部分采用了CCS811气体传感器,该传感器具有超低功耗,内置微控制器,可通过片上集成的MCU检测各种挥发性有机化合物,用于室内空气质量监测。片上MCU通过ADC对模拟数据进行采样,然后通过I2C接口将数据发送至主设备。CCS811这种板载处理功能降低了总体系统的功耗,延长了便携式应用中的电池续航时间,并减少了主系统所需进行的处理。其外围电路如图10所示。
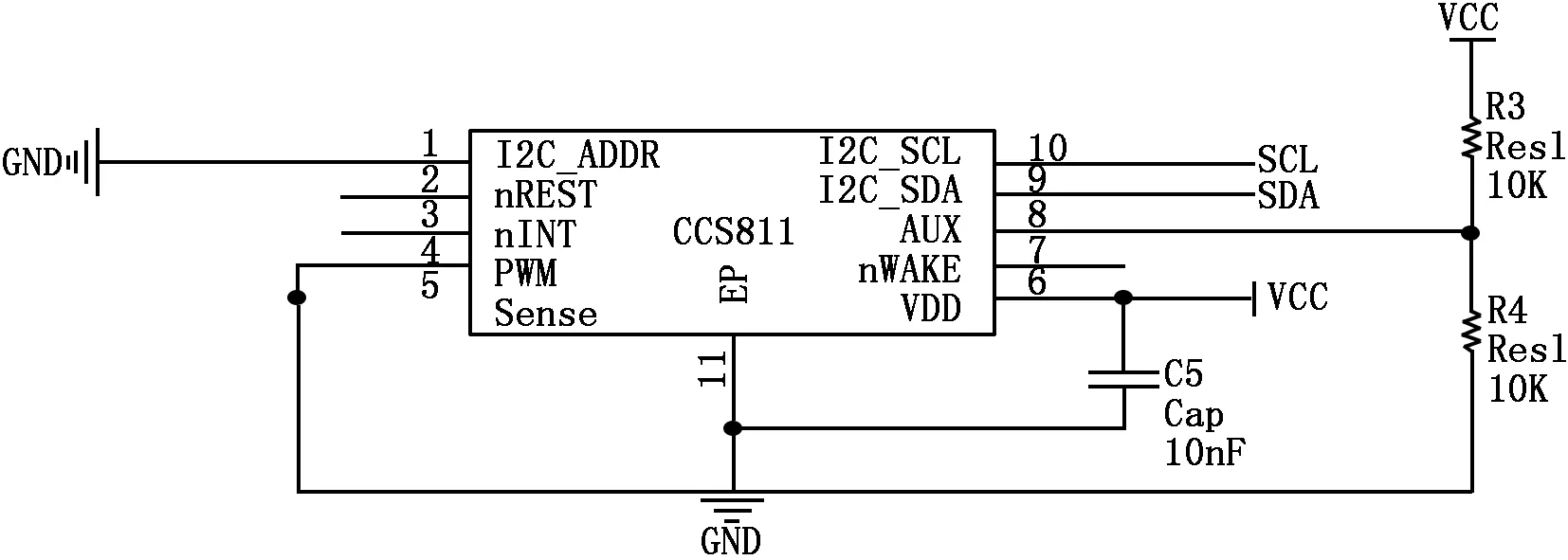
图10 气体传感器电路图
3 系统软件设计
3.1 车载终端程序
3.1.1 主程序
车载终端以STM32F103作为主控芯片,通过该芯片与毫米波雷达模块、北斗定位模块、加速度模块等传感器进行通信,该部分主要对多传感器进行控制,具体涉及MCU与传感器通过UART、SPI、I2C总线相连[13],其中I2C总线理论上最多可以同时挂载127个器件,每个器件通过不同的器件地址进行区分,完全满足终端的多传感器控制的情况。
车载终端的主程序工作流程为:
1)车载终端上电后,系统对各模块进行初始化;
2)开启加速度和北斗定位模块进行检测;
3)当检测到车辆静止时,开启雷达模块检测车内人员;
4)当车内有人时,进行温度、湿度及气体检测,当各传感器达到报警阈值时,采用分级报警机制(根据不同温度、湿度、气体情况,采用短信、拨打电话、自动报警上传定位信息)进行报警上传,报警阈值可根据实测情况进行配置。
主程序的控制流程图如图11所示。
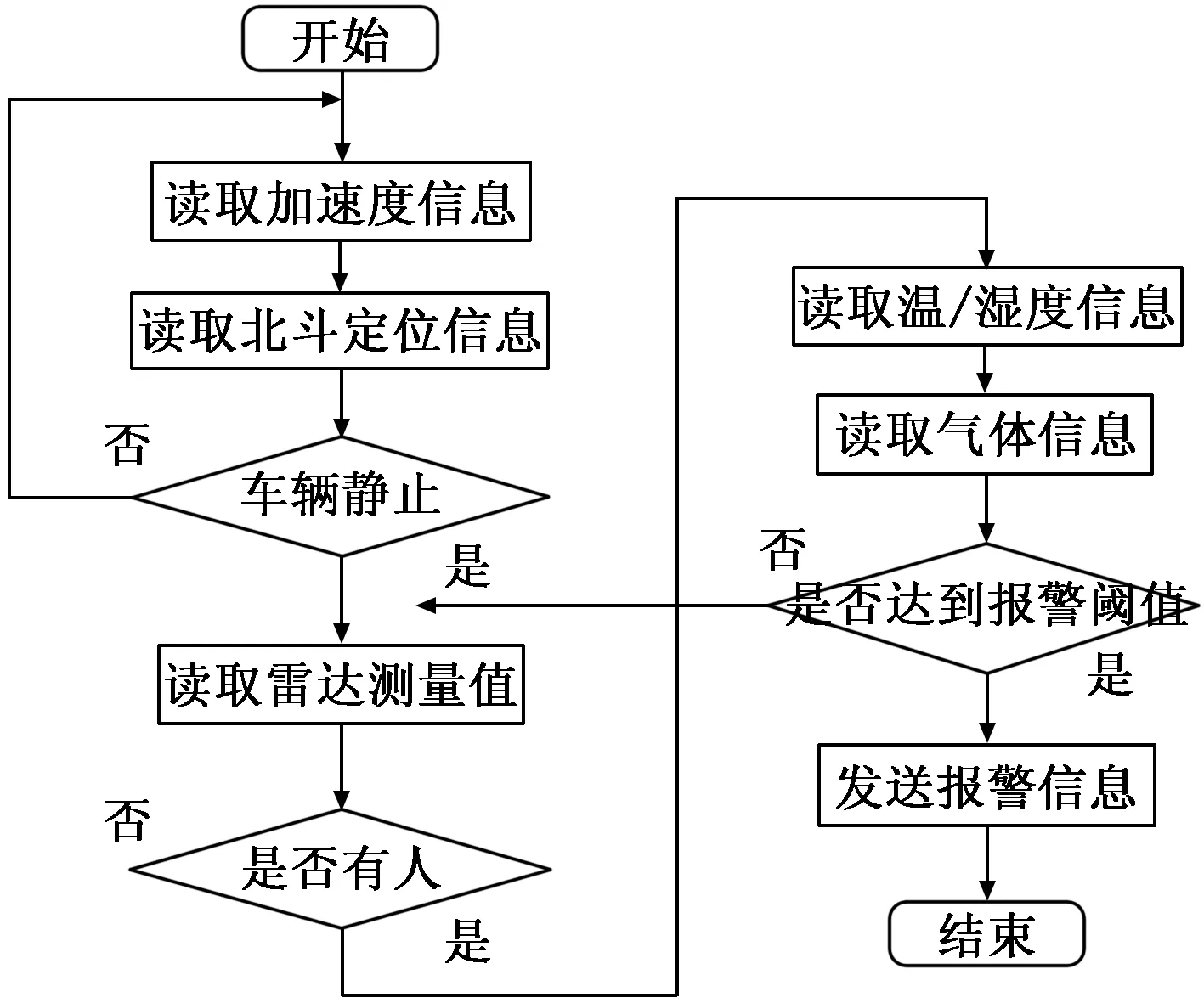
图11 车载终端主程序流程图
3.1.2 雷达人体微动探测
系统使用MIMO雷达探测人体微动信号,信号处理主要在AWR1642的DSP上执行,雷达前端收到回波信号后,经过ADC转换成数据信号进入DSP,在DSP完成帧处理后,将结果格式化并写入共享内存中再通过ARM R4F通过串口传输到上位机,整个处理流程为:
1)雷达回波信号进入DSP,经过距离-FFT、多普勒-FFT处理,对雷达信号进行距离维和速度维的计算,得到目标距离和速度二维反射热图;
2)基于minimum variance distortionless response (MVDR)的direction of arrival(DoA)估计方法,提取特征并估计目标的角度;
3)将检测信息传输到ARM。
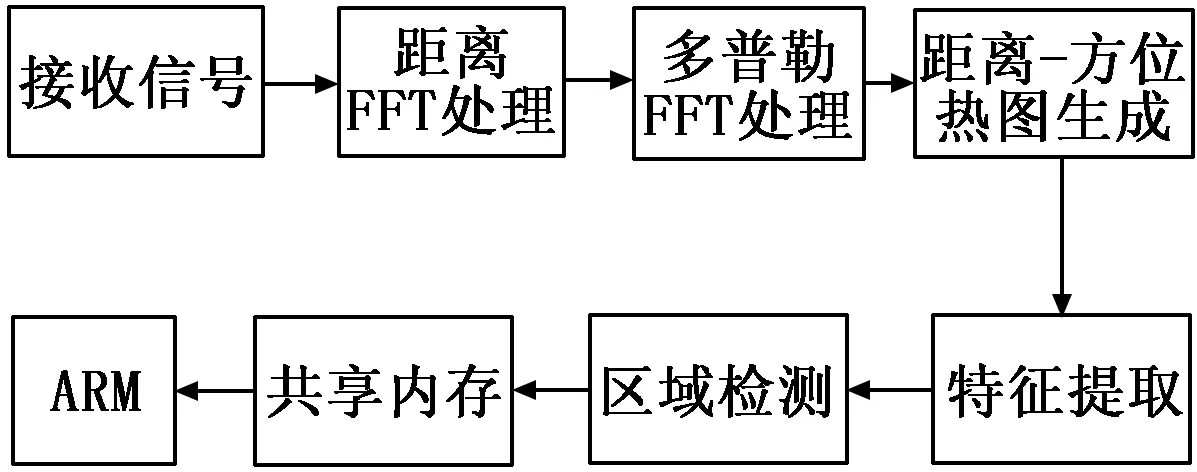
图12 雷达信号处理流程
3.1.3 北斗定位及加速度融合的运动状态检测
系统统采用北斗定位及加速度融合的方法来实时监测车辆运动状态,车辆在行驶过程时加速度变化最剧烈,可将正常行驶过程与停车过程区分为剧烈运动过程和非剧烈运动过程。若检测到车辆非剧烈运动,说明车辆停止行驶。
本系统采用双级检测算法来判别车辆停止行驶。双级检测算法主要分为两级,每一级算法都独立地进行一次状态检测,第二级算法只针对第一级已经判断为停止后的过程进行辅助验证[14]。本系统运动状态检测流程为:
1)将获取到定位信息的利用两点间距离公式计算得到坐标变化量。
2)选择滑动窗内各轴向加速度变化值超过门限值的总个数以及定位坐标变化量作为车辆运动状态参量。
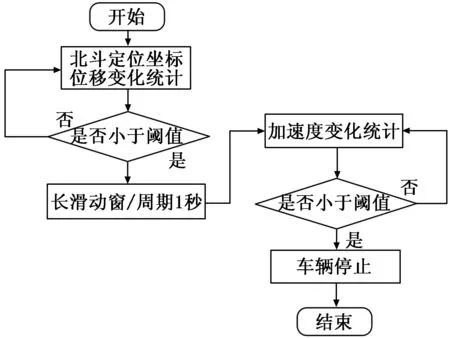
图13 运动状态检测流程图
3.2 上位机软件
车内人员智能防遗监测系统测试软件用于对系统功能进行测试及演示,采用Matlab的APP Designer进行设计,该软件工作流程为:首先创建主界面,开启串口向车载终端加载配置,车载终端接收到指令后,向上位机软件发送消息,上位机软件的主线程对上传的信息进行轮循并实时解析数据,将解析后的数据进行动态显示。主程序流程图如图14所示。
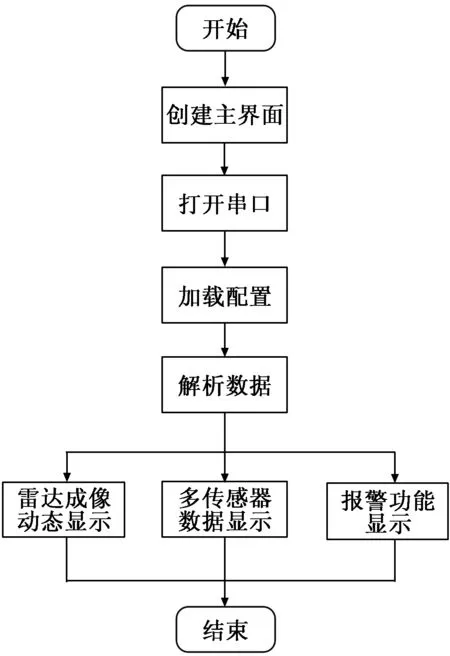
图14 上位机软件程序流程图
4 实验结果与分析
在室内演示静止车辆,系统将放于PC机前桌面上,正前方为人,加速度传感器和导航定位结果显示其为停止状态,当静止状态判定后,开始启动雷达传感器检测,如图14所示的车内人员状态窗口所示,灯(人员报警)显示出红色。当检测到有人的存在,设定温度35、湿度30为报警界限,使用打火机靠温度传感器,用HDC1080实时测定CO2浓度,设定CO2浓度报警界限为2 000 ppm。当气体传感器、温湿度传感器达到报警阈值时,启动通信模块上传报警信息(包括车内情况、车辆位置)至测试软件。

图15 实验测试结果1

图16 实验测试结果2
在车辆运动检测中,当车停止时,会受到周围路面震动的影响,且北斗芯片在定位时精度虽然可达到3米,虽然数据波动还是较大,但结合加速度传感器和定位信息,基本可以满足本设计的车辆运动检测要求。人体微动检测时,当人盖上衣服处于几乎静止的状态,此时人体的微动特征十分的微弱,雷达仍可以检测到车内人员的存在。
5 结束语
针对近年来人员遗留车内造成的安全问题,设计了基于MIMO雷达及北斗定位的车内防遗监测系统。该监测系统可独立放置于车前、车后或侧门,可实现车辆驻停后的车载生命探测,实时获取车内环境及车辆位置信息,并将采集信息存储、上传至软件平台,同时根据车内情况分级向用户发送报警信息,保证了车内遗留人员的人身安全。整个系统较好的实现了功能性指标,为后续车内人员微多普勒特征识别提供了技术支撑。