ATT对声自导鱼雷拦截方式变更的临界雷舰距离
2019-09-25陈颜辉张建清
陈颜辉,张建清
(1.中船重工集团公司第709研究所,湖北 武汉 430205;2.中国人民解放军91959部队,海南 三亚 572000)
对潜射声自导鱼雷的拦截是舰载反鱼雷鱼雷(anti-torpedo torpedo,ATT)拦截运用的一个重要内容。潜射声自导鱼雷的完整攻击弹道可分为初始段、自控直航段、直航搜索段、自导追踪段和再搜索段等部分[1-2]。综合分析螺旋桨动力ATT的技术性能以及水面舰艇鱼雷报警声纳的探测范围,不难看出,ATT应主要针对声自导鱼雷的直航搜索段末段以及自导追踪段的弹道实施拦截。但是,目前的相关文献主要是围绕其自导追踪段展开研究,而未提及本舰的规避机动对鱼雷追踪弹道的综合影响[3-8]。事实上,声自导鱼雷在直航搜索段和自导追踪段的弹道特征明显不同,ATT针对这2段弹道的拦截原理也有着很大区别,由此就涉及到ATT拦截方式变更的临界雷舰距离概念,下面对此展开详细探讨。
1 ATT拦截声自导鱼雷原理
当潜射声自导鱼雷处于直航搜索状态时,其自导装置虽已开机但尚未发现目标,则鱼雷通常仍保持定向直航。当鱼雷自导捕获目标后就会转入自导追踪状态,其弹道特征则由鱼雷的自导追踪方式和目标航行状态等因素综合决定。2种不同的弹道决定了ATT要采取不同的拦截方式。
1.1 对直航搜索段鱼雷的拦截
在发射ATT拦截处于直航搜索状态的鱼雷时,首先要预测其直航搜索段的弹道散布,以便有针对性地确定拦截区域,弹道预测原理详见文献[2,9-10],在此不作赘述。在预测出鱼雷直航搜索段的弹道散布后,ATT可采取提前角拦截、迎击弹道拦截或方位线拦截来实施对抗[11]。图1为ATT提前角拦截示意图,当ATT自导扇面的前端中点(或几何形心)与来袭鱼雷构成相遇三角形时,其自导搜索带能够对称遮盖目标散布,捕获概率最大,对应于目标方位的射击提前角就是ATT的有利射击提前角。
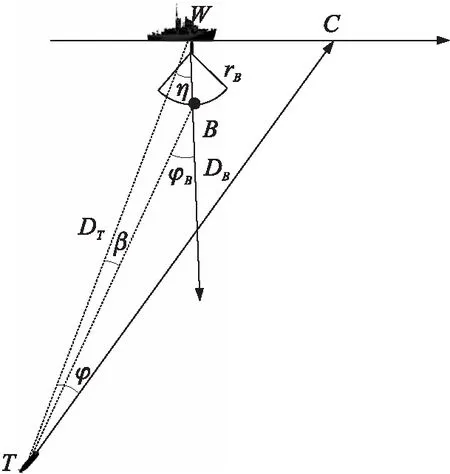
图1 ATT提前角拦截要素求解示意图
令雷舰距离为DT,声自导鱼雷航速为vT,射击提前角为φ,ATT按照有利提前角η射击,航速为vB,自导作用距离为rB,自导扇面前端中点B处所对应目标方位的提前角为φB。当B点与T点鱼雷弹道构成相遇三角形时,有下面的关系式成立:
sinφB=[vTsin(φ-β)]/vB=(DTsinβ)/rB
(1)
经化简整理得到:
(2)
最终,得到ATT射击的有利提前角η:
(3)
式中:来袭鱼雷射击提前角φ的求解原理详见文献[2,9]。
1.2 对自导追踪段鱼雷的拦截
当来袭鱼雷进入自导追踪状态时,鱼雷弹道则会呈曲线特征,可预测性差,这就增加了ATT拦截运用研究的难度。文献[3-8]围绕这种曲线弹道从不同角度展开了探索,但其研究背景中均未考虑本舰机动与鱼雷追踪弹道之间的关联效应,以及由此引起ATT拦截方式的变化,这是与实际不符的。因为任何水面舰艇发现鱼雷来袭时都不可能无动于衷,但本舰一旦采取规避机动,则必然会引起鱼雷的自导追踪弹道也发生相应变化,这种状态下发射ATT实施拦截时,就要进行相应调整才能确保可靠命中。调整原则就是通过本舰采取的典型规避机动方式来预测鱼雷自导追踪弹道的变化,从而确定ATT拦截方式及射击要素。
2 拦截方式变更的临界距离
根据以上分析,针对声自导鱼雷的2个制导阶段实施拦截时,相关的鱼雷弹道特征和ATT拦截运用原理各不相同,这就涉及到了ATT拦截方式变更时对应临界雷舰距离D′T的求解问题。考虑到鱼雷自导追踪弹道主要受本舰机动方式的影响,下面按照本舰分别采取背转停车规避、保持原状态航行和转向远离规避3种典型态势展开分析。
2.1 背转停车规避
背转停车规避能够迅速降低本舰辐射噪声,虽然从指挥作战心理方面考虑难以被轻易接受,但理论上仍存在一定合理性。图2给出了本舰采取背转停车规避时的D′T求解示意:水面舰艇以航速vW沿x轴正向直航,抵达W点时探测到右舷xW处的T点出现可疑信息;水面舰艇经分析后在W′点确认报警,立即背转停车并择机发射ATT,对航行至T′点的鱼雷实施提前角拦截;当来袭鱼雷航行至T″点时自导装置捕获本舰,之后鱼雷将转入自导追踪弹道。不考虑各种误差因素以及ATT追踪弹道的曲率特性,如果由W′发射的ATT恰好与来袭鱼雷在T″点相遇,则W′T′段雷舰距离D′T就是背转停车规避态势下ATT拦截方式变更的临界雷舰距离。

图2 停车规避时D′T的求解示意图
令鱼雷自导作用距离为r,末制导采取尾追弹道,其余参数含义同前。观察图2,当ATT恰好与来袭鱼雷在T″点相遇时,存在以下关系式:
(4)
式中:DB为ATT从发射点W′到T″点的航程,若按照ATT自导捕获时刻算则为DB-rB;sT为ATT走完DB段航程时间内所对应的T′T″段鱼雷航程;γ为鱼雷抵达T′点时相对本舰停车方位W′T′的提前角;DK为鱼雷捕获本舰时的T″点到W′T′方位线的垂直距离(即T″K段);DT为本舰开始背转旋回时的雷舰距离;D′T为W′点水面舰艇在发射ATT时刻所对应的W′T′段雷舰距离,满足指定条件(由W′发射的ATT恰好与来袭鱼雷在T″点相遇)时即为临界雷舰距离。
按照以上想定进行仿真,取水面舰艇航速vW=9 m/s,辐射噪声各向同性,报警声纳探测到鱼雷可疑信息的距离为5 000 m,当雷舰距离DT=4 000 m时,确认报警并立即停车;鱼雷航速vT=22.5 m/s,在vW=9 m/s时,对应鱼雷被动自导距离为1 400 m,在水面舰艇停车时,按照鱼雷主动探测,取自导距离同样为1 400 m;令ATT航速vB=vT,λB=90°,rB为600~800 m。
编译并运行仿真程序,标注报警舷角XW为30°,60°,90°,120°,150°时所对应的T″点,计算DB,sT以及相应的临界雷舰距离D′T,再根据DB,sT和T″点标注出D′T的远端点T′,对T′作拟合曲线,如图3所示。

图3 停车规避时T′点拟合曲线
在图3中,对应的ATT发射点W′为固定点,鱼雷从舰首到舰尾不同舷角入射时的T′点围绕W′点近似呈对称分布。
2.2 原状态航行
本舰发现鱼雷报警后继续保持原状态航行的情况在实际对抗中并不具有代表性,但相关对抗策略研究仍是业内关注的一个重点内容。图4给出了本舰保持原状态航行时的D′T求解示意:水面舰艇以航速vW沿x轴正向直航,抵达W点时探测到右舷XW处的T点出现可疑信息;经过分析确认鱼雷并报警后,水面舰艇继续保持原状态航行,并于W′点发射ATT,对航行至T′点的鱼雷实施提前角拦截;本舰在抵达W″点时被航行至T″点鱼雷自导装置捕获,之后鱼雷将转入自导追踪弹道。不考虑各种误差因素以及ATT追踪弹道的曲率特性,如果由W′发射的ATT恰好与来袭鱼雷在T″点相遇,则W′T′段雷舰距离D′T就是原状态航行态势下ATT拦截方式变更的临界雷舰距离。
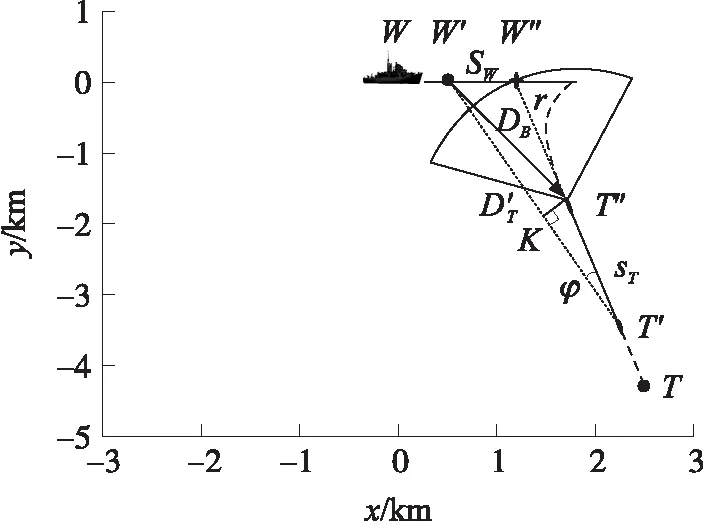
图4 保持原状态航行时D′T的求解示意图
令sW为水面舰艇在W′W″段的航程,ATT航速vB=vT,其余参数含义同前,则存在以下关系式:
(5)
令鱼雷和ATT参数设置同前,取水面舰艇航速vW=9 m/s,报警声纳探测到鱼雷可疑信息的距离为5 000 m,确认鱼雷报警后继续保持原航行状态。编译并运行仿真程序,标注报警舷角XW为30°,60°,90°,120°,150°时所对应的W″点和T″点,计算DB,sT以及相应的临界雷舰距离D′T,再根据DB,sT和T″点标注出D′T的远端点T′和近端点W′,对T′作拟合曲线,如图5所示。

图5 保持原状态航行时T′点拟合曲线
在图5中,对应的ATT发射点W′和本舰被捕获点W″均非固定点,而是沿着本舰航行方向,并随报警舷角XW的增加由近至远排列。T′点则在舰首方向距离W′最远,在舰尾部方向最近。
2.3 转向远离规避
本舰发现鱼雷报警后立即转向规避是一种典型的对抗方式,但与纯机动规避目的不同,当无法摆脱鱼雷的捕获与攻击,且在ATT可用的情况下,应将全力保障ATT的拦截效果作为规避机动的主要目的。而根据鱼雷自导追踪特征,当本舰立即转向将鱼雷置于舰尾舷角远离航行时,无论来袭鱼雷采取哪一种追踪方式,都只有沿着当前或近似当前雷舰方位线接近本舰,才能确保命中(否则不会对本舰构成威胁),这种态势下的自导追踪弹道也就具备了可清晰预测的特征。此时水面舰艇再投放ATT并使其沿雷舰方位定向直航,则可获得最佳的拦截效果[12]。
图6给出了本舰采取转向远离规避时的D′T求解示意:水面舰艇以航速vW沿x轴正向直航,抵达W点时探测到右舷XW处的T点出现可疑信息;经过分析确认鱼雷并报警后,水面舰艇立即转向,将鱼雷置于舰尾舷角并高速脱离,期间于某点W′发射ATT实施提前角拦截,本舰在抵达W″点时被航行至T″点鱼雷的自导装置捕获,之后鱼雷将转入自导追踪弹道。不考虑各种误差因素以及ATT追踪弹道的曲率特性,如果由W′发射的ATT恰好与来袭鱼雷在T″点相遇,则W′T′段雷舰距离D′T就是转向远离态势下ATT拦截方式变更的临界雷舰距离。
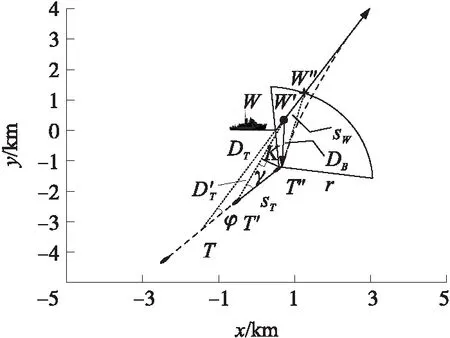
图6 转向规避时D′T的求解示意图
转向规避的对抗态势比较复杂,为计算方便,可做如下近似:
DB/vB≈fr/(vB+vW)
(6)
当水面舰艇规避航速vW=9 m/s时,可取经验系数f=1.38-0.15XW,其中,XW以弧度为单位。则有以下关系式:
(7)
令鱼雷和ATT参数设置同前,取水面舰艇航速vW=9 m/s,报警声纳探测到鱼雷可疑信息的距离为5 000 m,当雷舰距离DT=4 000 m时,确认鱼雷报警并满舵转向;取水面舰艇规避决策延迟时间td=10 s,旋回角速度ω=0.03 rad/s,当水面舰艇以vW=9 m/s航行时鱼雷自导距离为1 400 m,当处于满舵转向状态或以vW=15 m/s高速规避时,鱼雷自导距离均为2 500 m。
编译并运行仿真程序,标注报警舷角XW为30°,60°,90°,120°,150°时,所对应的W″点和T″点,计算DB,sT以及相应的临界雷舰距离D′T,再根据DB,sT和T″点标注出D′T的远端点T′和近端点W′,对T′作拟合曲线,如图7所示。

图7 转向规避时T′点拟合曲线
在图7中,对应的ATT发射点W′和本舰被捕获点W″均非固定点,尤其W′点或者位于本舰转向点,或者位于转向后的本舰航线上。T′点在舰首方向距离W′最远,在舰尾部方向最近。
2.4 数值仿真与规律分析
利用上述3种模型及给定参数,围绕D′T进行数值仿真,如图8所示;围绕DK进行数值仿真,如图9所示。其中,对转向远离规避情形,按照转向后航速分别为9 m/s和15 m/s进行了仿真。
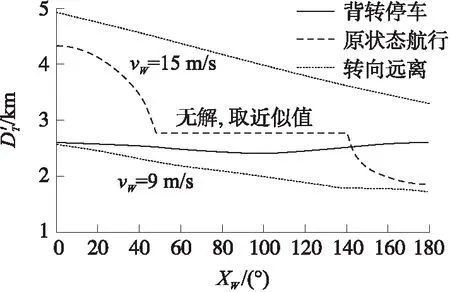
图8 3种态势下D′T的数值仿真

图9 3种态势下DK的数值仿真
在仿真给定条件下,分析不同态势的D′T和DK,可以得出以下规律:
①观察比较图8、图9和图3,当水面舰艇采取背转停车规避时,鱼雷从首尾附近入射时D′T≈2r,从正横附近入射时D′T有所减小,这主要是鱼雷提前角φ随报警舷角XW呈小幅变化所致的波动。
鱼雷从正横附近入射时,有DK≥500 m,这意味着本舰向正横附近、T′以远的鱼雷方位发射ATT时,将无法覆盖到T″点附近的鱼雷弹道(见图3)。
②观察比较图8、图9和图5,当水面舰艇始终保持原状态航行时,鱼雷从舰首附近入射,D′T>2r,从舰尾附近入射,D′T<2r。从正横方向一定舷角范围内入射时D′T和DK无解,即式(5)中根号下为负值,出现vW/vB 鱼雷从正横附近入射时,DK较小,意味着沿T′鱼雷方位发射的ATT能够覆盖到较大部分的鱼雷自导追踪弹道。 ③观察比较图8、图9和图7,当水面舰艇采取背转远离规避时,鱼雷从舰首附近入射,所对应的ATT发射点W′并不在本舰转向后的航线上,而是位于转向点W上。这是由于水面舰艇规避舰首入射鱼雷时需要实施大角度转向,在转向点W的时间消耗较长,转向完毕前就被鱼雷自导装置成功捕获,所对应的D′T,DK均与图3中背转后停车情形相近。 当鱼雷从舰尾附近入射时,水面舰艇转向旋回的角度很小,在转向点W的时间消耗较短,若转向完毕继续保持vW=9 m/s常速航行,则D′T,DK与图5中保持原状态航行的情形相近。 当水面舰艇采取vW=15 m/s高速规避时,鱼雷自导距离会增加,进而导致D′T和DK也相应增加,甚至会出现D′T>DT的情形(见图7中XW≤90°时),说明这种情况下水面舰艇一经发现鱼雷就只能拦截其自导追踪弹道,而无法对其直航搜索弹道实施拦截。鱼雷从正横附近入射时,DK≥500 m,也意味着本舰向正横附近、T′以远的鱼雷方位发射ATT时,将无法覆盖到T″点附近的鱼雷弹道。 根据以上分析,水面舰艇在对抗声自导鱼雷时,ATT拦截方式变更的临界雷舰距离D′T是客观存在的。当实际雷舰距离DT≥D′T时,应针对鱼雷的直航搜索弹道确定ATT射击要素;当实际雷舰距离DT 尽管D′T是客观存在的,但是考虑到本舰辐射噪声的声场分布、报警声纳的测向误差、鱼雷性能估计误差、鱼雷弹道预测散布以及本舰规避策略的多样性等因素的影响,实际对抗中要对D′T予以准确把握和利用并不容易。如何降低D′T的不利影响,寻求与D′T无关或弱相关的对抗策略,这将成为ATT拦截运用研究中需要重点关注的问题。目前可考虑从以下几个战技方向着手采取措施: ①发射2枚或多枚ATT,针对来袭鱼雷直航搜索段弹道散布和自导追踪段的弹道散布同时构成有效遮拦。 ②从技术层面着手增加ATT的自导探测范围,或者从运用层面着手探讨对ATT拦截航向的进一步修正,以确保ATT的遮拦宽度能对2种弹道散布构成全部覆盖。 ③不以毁伤鱼雷概率最大为目的实施提前角拦截或迎击弹道拦截,而是以对本舰当前位置点W能构成最强防护为目的实施方位线拦截。 ④利用本舰规避机动与鱼雷自导追踪弹道的关联性,选择合理的规避方式来提高对鱼雷自导追踪弹道的预测精度,并判断鱼雷距离比较近时再沿其方位线发射ATT拦截。3 结束语
