自主水下航行器回旋运动总体参数敏感性分析
2019-09-25刘曜,朱珠
刘 曜,朱 珠
(1.中国船舶重工集团公司第713研究所,河南 郑州 450015;2.河南省水下智能装备重点实验室,河南 郑州 450015)
随着我国海洋战略的发展,自主水下航行器应用越来越广泛。美国伍兹霍尔海洋研究所研制有远距离环境监测装置及深海探测器AUV等产品,国内西北工业大学研发了系列化的重型远程自主水下航行器,以及系列化的微小型便携式自主水下航行器。自主水下航行器可应用于海洋探测、海底管路维修、海洋打捞等工作,有效地解决了人们深海作业的难题。打捞等作业活动,需要水下航行器具备稳定的运动特性,总体参数是影响水下航行器回旋运动稳定性的重要因素,国内外对此研究的文献不多。本文对各总体参数变化对水下航行器回旋特性的影响进行了数值计算和分析,为水下航行器总体参数的优化提供参考和依据[1]。
1 水下航行器六自由度方程
1.1 坐标系定义
航行器坐标系(弹体系):坐标原点位于航行器浮心,Ox轴与纵轴重合指向航行器头部,Oy轴居于纵对称面,指向上方。地面系:坐标原点在航行器初始运动时浮心对应水面位置,O0x0轴指向初始运动方向,O0y0轴铅垂向上。速度系:坐标原点位于浮心,Ox′轴始终与速度矢量方向重合,Oy′轴在航行器纵对称面,指向上方。3种坐标系均为右手直角坐标系,z轴由右手法则确定,坐标示意见图1,图2为水下航行器结构示意图。
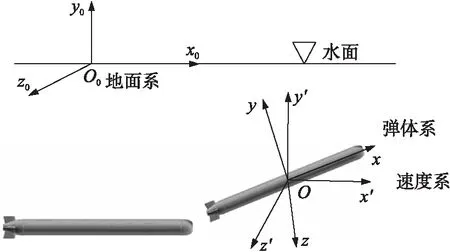
图1 水下航行器坐标系定义

图2 水下航行器结构示意图
1.2 动力学方程
在弹体系中建立动力学方程组,弹体系的原点位于水下航行器浮心。设航行器运动的角速度ω及浮心处的速度v在弹体系中的3个分量分别为ωx,ωy,ωz,vx,vy,vz;航行器的质量为m,质心在弹体系中的坐标为(xc,yc,zc)。根据动量和动量矩定理[2]:
mzc(vzωx-vxωz)+(Jz-Jy)ωyωz
mxc(vxωy-vyωx)+(Jx-Jz)ωzωx
myc(vyωz-vzωy)+(Jy-Jx)ωxωy
(1)
式中:Fx,Fy,Fz,Mx,My,Mz分别为作用在航行器上的外力F和力矩M在弹体系中的分量,包括理想流体惯性力、流体黏性位置力、流体黏性阻尼力、浮力、重力、轴推螺旋桨推力、垂推旋桨推力、侧推旋桨推力和舵力(矩);Jx,Jy,Jz为航行体转动惯量。
1.3 运动学关系式
水下航行器转动是由3个姿态角(俯仰角θ、偏航角ψ、横滚角φ)描述,转动角速度(在弹体系分量为ωx,ωy,ωz)与3个姿态角变化率的关系式即为航行器转动的运动学关系式:
(2)
(3)
(4)
1.4 攻角和侧滑角
(5)
式中:α为攻角,β为侧滑角。
2 水下航行器回旋特性
2.1 回旋状态仿真
回旋状态是水下航行器重要的一种运动模式,回旋半径、时间和回旋一周深度变化是航行器重要的特性参数[3]。针对参考状态,即水下航行器轴向推力20 N、浮力Fb=5 N、重心浮心距dc=0 mm、重心下移量dy=10 mm、重心侧移量dz=1 mm、垂直舵25°的回旋状态进行了仿真。仿真时间为200 s。图3为水下航行体参考状态的空间运动曲线。
2.2 浮力敏感性
在保持参考弹道其他参数不变的情况下,取浮力Fb=10 N的情况进行了仿真计算,结果如图4~图7所示。

图3 参考状态的空间运动曲线
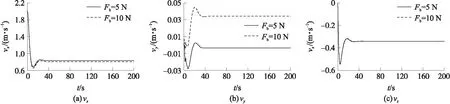
图4 浮力变化对回旋速度的影响
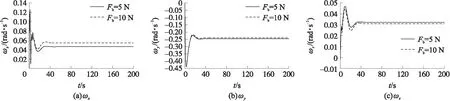
图5 浮力变化对回旋角速度的影响

图6 浮力变化对回旋深度的影响
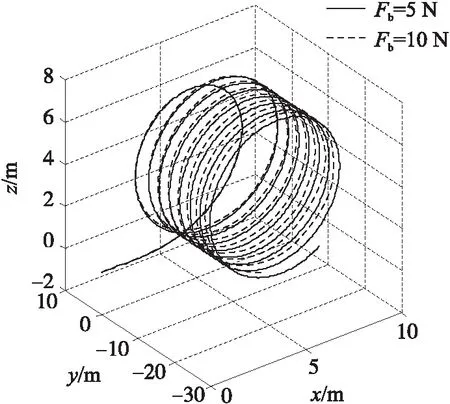
图7 浮力变化对回旋空间运动的影响
2.3 重心浮心距敏感性
在保持参考弹道其他参数不变的情况下,取重心在浮心前dc=10 mm、重心在浮心后dc=-10 mm的情况进行了仿真计算,结果如图8~图11所示。

图8 重心浮心距变化对回旋速度的影响

图9 重心浮心距变化对回旋角速度的影响
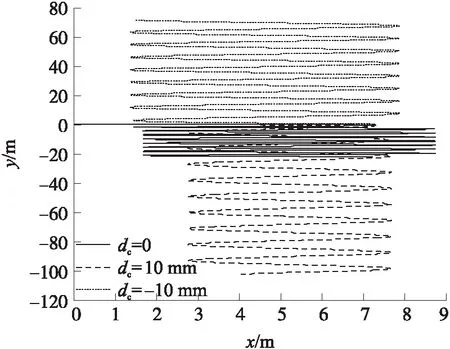
图10 重心浮心距变化对回旋深度的影响

图11 重心浮心距变化对回旋空间运动的影响
2.4 重心下移量敏感性
在保持参考弹道其他参数不变的情况下,取重心在浮心下dy=-15 mm情况进行了仿真计算,结果如图12~图15所示。
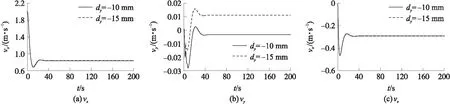
图12 重心下移量变化对回旋速度的影响
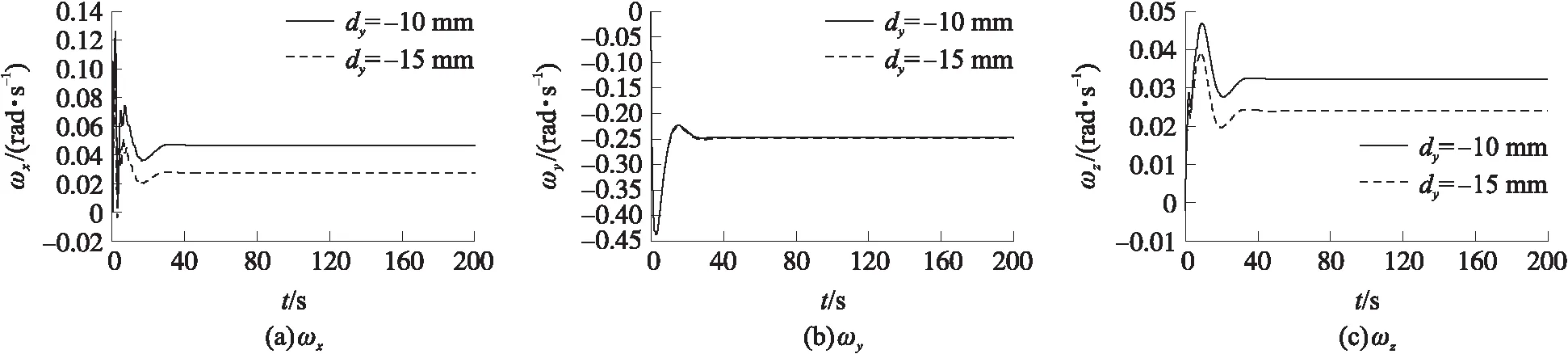
图13 重心下移量变化对回旋角速度的影响
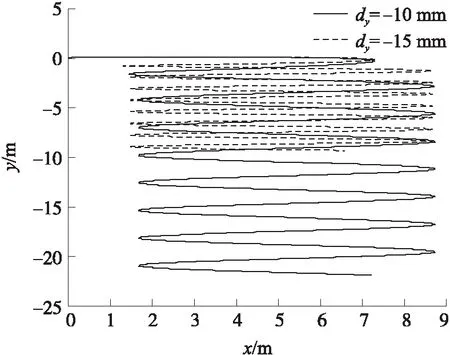
图14 重心下移量变化对回旋深度的影响
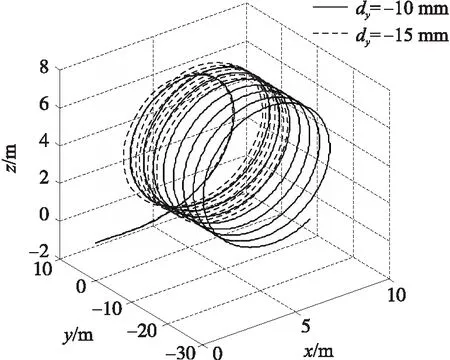
图15 重心下移量变化对回旋空间运动的影响
2.5 重心侧移量敏感性
在保持参考弹道其他参数不变的情况下,取重心侧移量dz=3 mm情况进行了仿真计算,结果如图16~图19所示。
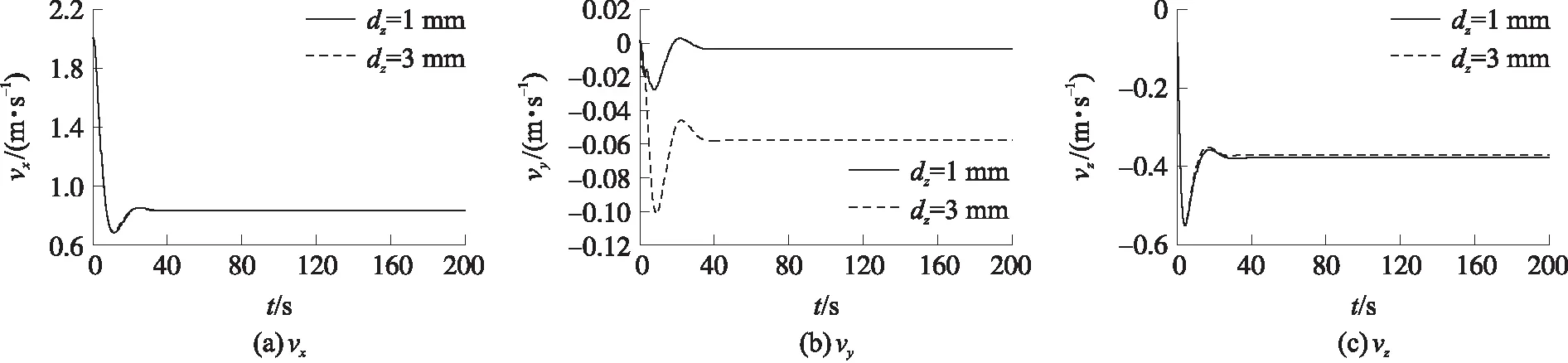
图16 重心侧移量变化对回旋速度的影响

图17 重心侧移量变化对回旋角速度的影响
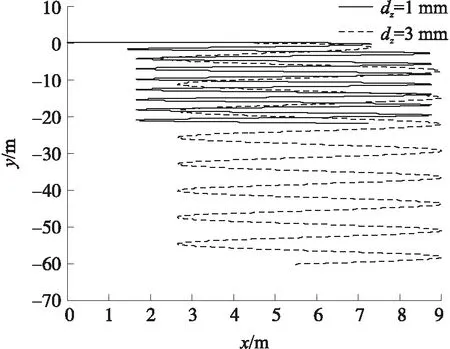
图18 重心侧移量变化对回旋深度的影响
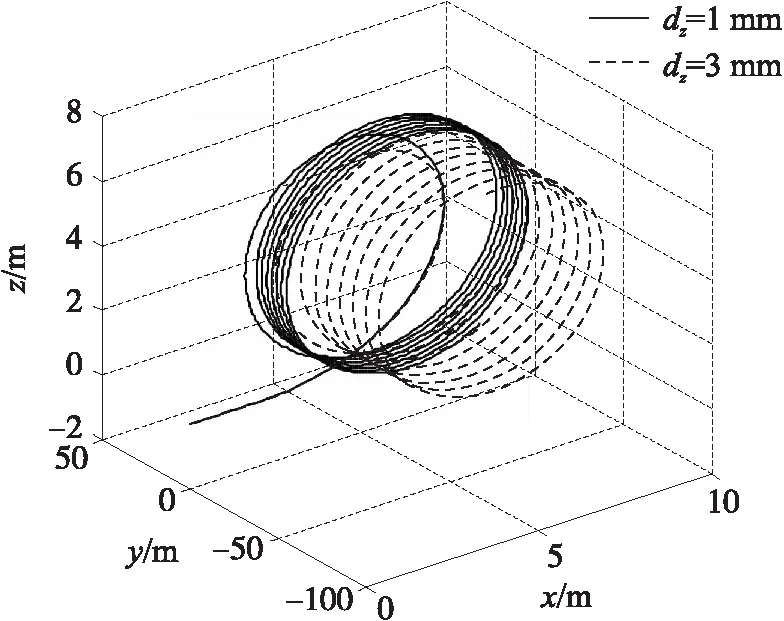
图19 重心侧移量变化对回旋空间运动的影响
2.6 总体参数敏感性分析
根据以上仿真结果分析得:
①在参考状态下,航行器在200 s的时间内完成了8圈回旋,回转半径不大于5 m,回旋深度约20 m,航行器每回旋一周平均下沉2.5 m;回旋过程中俯仰角θ在-1°~1°间变化、横滚角φ在-3°~3°间变化,偏航角持续线性增加。
②浮力变化对水下航行器运行特性影响不大,当浮力由5 N增大到10 N时,航行器的运行速度、姿态、回旋下沉深度和空间运动路径基本与参考状态一致。
③重心浮心距的变化会使水下航行器的运行俯仰角发生变化。当重心在浮心前时会产生向下的俯仰角,产生向下的速度(即vy为负),因而每回旋一周的下沉深度大于参考状态;当浮心在重心前时会产生向上的俯仰角,产生向上的速度(即vy为正),因而每回旋一周将上浮一定的距离。由计算结果可得:参考状态下,200 s时间内水下航行器回旋下沉深度约20 m;重心在浮心前10 mm状态下,水下航行器回旋下沉深度约100 m;重心在浮心后10 mm状态下,水下航行器回旋上浮深度约70 m。
④重心下移量增大能提高水下航行器运行的稳定性,当重心下移量由10 mm增加到15 mm时,水下航行器运动稳定性增加,由横滚所产生的向下的速度减小,因而使航行器回旋下沉的深度显著减小。由计算结果可得:参考状态下,200 s时间内水下航行器下沉深度约20 m;重心下移量15 mm状态下,水下航行器下沉深度约10 m。
⑤重心侧移量增大将降低水下航行器运行的稳定性,当重心侧移量由1 mm增加到3 mm时,水下航行器运动稳定性降低,由横滚所产生的向下的速度增大,因而使航行器回旋下沉的深度显著增大。由计算结果可得:参考状态下,200 s时间内水下航行器下沉深度约20 m;重心侧移量3 mm状态下,水下航行器下沉深度约60 m。
3 结束语
本文在建立水下航行器六自由度空间运动方程的基础上,运用MATLAB/Simulink模块对水下航行器的空间回旋状态进行了数值仿真,并对各总体参数变化对水下航行器回旋特性的影响进行了数值计算和分析,得到了总体参数对水下航行器空间回旋运动的影响规律:①浮力变化对水下航行器的运行速度、姿态、回旋下沉深度、空间运动路径的影响不大;②重心浮心距的变化会使水下航行器的运行俯仰角发生变化;③重心下移量增大能提高水下航行器运行的稳定性,重心侧移量增大将降低水下航行器运行的稳定性。以上结论可以直接应用于水下航行器的设计和总体参数优化。
