基于YK8A04-P运动控制卡的教学平台研究
2019-09-24王文超李春亚
王文超 李春亚

摘 要:文章主要采用PC机+运动控制卡的控制系统,利用PC机与运动控制卡的协同工作,实现对伺服电机的控制。在PC机上采用Labview语言建立良好的人机交互界面,通过调用运动控制卡的函数库,实现速度控制、圆弧插补、直线插补和G代码编程等基本功能,满足基本的数控教学应用。
关键词:数控教学平台;Labview
引言
随着PC机技术的发展和成本的降低,PC机在各种工业现场的应用越来越普遍。近年来随着先进控制理论的发展和DSP技术的成熟。基于DSP技术各种集成运动控制模块不断成熟并应用到工业控制当中。相比传统的数控系统,PC机+运动控制卡模式的控制系统具有较高柔性、模块化等优势,越来越受重视。笔者采用PC机+运动控制卡作为数控教学平台的数控系统,采用伺服驱动和伺服电机对教学平台进行控制。采用Labview图形化编程语言进行人机交互系统的开发[6]。
1 数控实验教学平台的设计方案
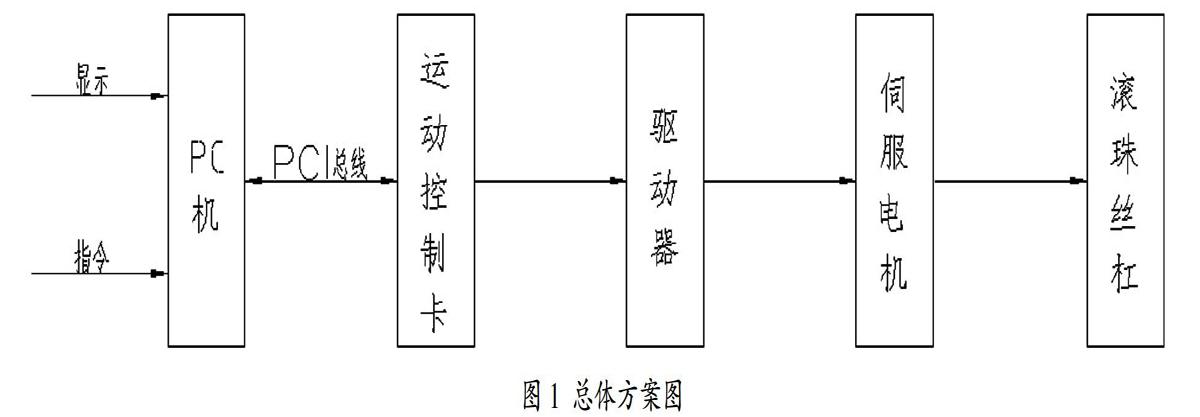
本教学平台主要模拟数控机床运动控制和G代码编程的操作,该系统主要应用于机械制造及其自动化专业的实践教学环节的应用。性能与一般的数控机床具有类似功能,能够实现X、Y、Z轴的运动控制,可以设置各轴的运动方向,最大速度、最小速度和显示刀具的相对坐标位置等,并且能够实现对G代码指令的读取、编译,实现X、Y轴的两轴联动。本系統采用“PC机+运动控制卡”的控制模式,其总体方案如图1所示。
该控制方案具有开放性和可扩展性,系统结构简单靠性高。由于教学实践的要求,系统由机械系统和电气系统组成。
2 教学平台机械部分组成
本教学实验平台采用龙门式结构形式。基本包括:滚珠丝杠副、伺服电机、直线导轨、固定支架等部件。
通过伺服电机带动滚珠丝杠转动,丝母固定在一块滑块就形成了运动构建。搭建龙门式三轴运动试验平台,如图2。
3 电路和控制系统的设计和组成
教学实验平台的控制系统采用“PC机+运动控制”的控制模式。PC 机主要实现系统的总体控制和对软件的运行提供硬件平台支撑。运动控制卡实现各种核心控制和运算,负责处理运动控制的细节,比如速度控制、行程控制、插补运算等。PCI总线负责PC机与运动控制卡的通信传输。运动控制卡通过PC机主板上自带的PCI插槽内嵌到工控机中。运动控制卡通过向伺服驱动器发送脉冲和高低电平来控制伺服电机的转速、转数和方向[3]。图3所示为控制系统原理图。
3.1 PC机和运动控制卡
PC机的配置为奔腾4的处理器,1G内存,500G硬盘,Windows XP的操作系统。运动控制卡采用的是芯钰科的YK8A04-P运动控制卡。YK8A04-P是一款基于PCI总线的高性能运动控制卡,可控制四轴伺服或步进电机。具有快速、直线和圆弧插补功能。
3.2 伺服电机和伺服驱动器
电机采用的是安川SGMJV-01ADA21伺服电机,功率为100W,额定转速3000r/min,额定转矩0.318N·m。
伺服驱动器采用品SGDV-R90A01A,主要参数为:额定电压为220V,频率为50/60Hz。
3.3 电气柜与电路设计
电气柜组成:500×400×250 的配电箱一个、伺服驱动器三台、24V电源一台其他辅助元件若干。部件布局合理及接线顺序整齐,对控制电路采用上电自锁与急停停止,达到安全使用。
4 控制软件的设计和开发
数控系统的操作软件是使用者对平台控制的重要载体,数控系统软件应具有良好的人机交互性、直观性和易操作性,本系统采用Labview语言开发。
4.1 软件的研究和设计
一般运动控制卡的二次开发采用VC++、VB等编译软件编写,程序编写工作很大,不利于提高效率,使得开发者把大部分的精力放在了界面的编写上。本文采用的是图形化编程语言Labview,该语言的特点就是编程可视化、易学习和使用,避免繁琐的界面编程,提高效率。
Labview外部接口能力强大,DLL是其常用的外部接口之一。芯钰科的YK8A04-P运动控制卡提供了DLL的动态链接函数库。函数功能主要有:板卡初始化函数、运行条件初始化函数、轴运行状态函数、运动速度设置函数、运行距离函数、直线插补函数、圆弧插补函数、停止运行函数、板卡结束运行函数等,每个功能函数一般都有自己独立的接口。通过Labview中自带的互联互通接口可以把DLL中的函数转化为Labview中的子VI,方便我们在编程中的使用[1]。
4.2 教学实验平台的软件开发
我们要实现对X、Y、Z 三轴的初始速度、驱动速度及目标位置的手动设置,同时即可以手动选择控制三轴正负向的运动,让三轴按设定数据自动运行。并可以在运动期间对各轴的实际位置、逻辑位置、运动速度的实时监控。可以实现两轴圆弧插补、调用测试代码及G 代码等功能。通过前后面板的设计,确立了软件系统设计框架,如图4。
4.3 单轴运动界面设计
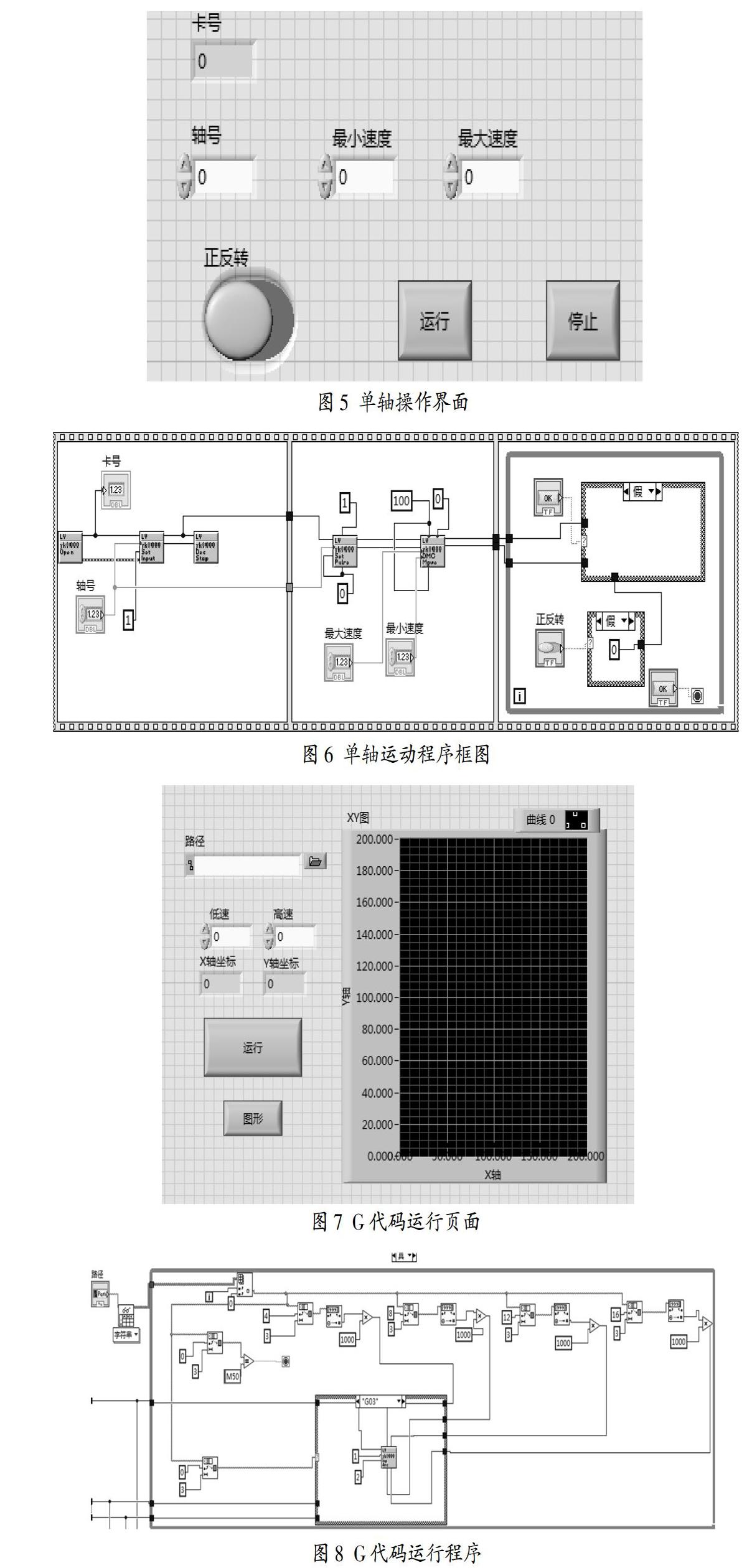
首先应明确所要实现的目标,单轴运动控制的目标就是初始化控制卡,选择控制的轴,设定运动的最大、最小速度,控制轴的正反转和运行停止等功能(如图5)。
单轴运动函数图框,采用顺序结构框图一步步执行程序,从左至右为运动控制卡的初始化、速度的设置、运动开始和正反转等函数,程序直接调用这些子VI就能达到运动控制的目的,使得激光打标机按照我们要求的轨迹运动。如图6。
4.4 运行加工程序的界面
运行加工程序的界面要实现程序的读取,速度的设置,联动轴的实时坐标位置和运行轨迹的显示等功能(如图7)。
运行加工程序的实现以Labview中的读取文件命令,读取txt程序文件,执行每行的G代码命令,通过逻辑控制选择执行运动命令。如图8。
5 結束语
本文实现了用Labview语言开发数控教学实验系统,实现上位机来编程的高效率与运动控制卡的灵活性。采用PC机+运动控制卡的模式对多个伺服电机进行控制。该系统不同于封闭式的传统数控系统,实现了通过人机界面和简单的传动设备,让实验者了解基本的数控操作。本系统采用价格相对较低的普通运动控制卡,采用图形编程,提高效率,降低成本。
参考文献:
[1]张卫星,陆文灏.基于labview的开放式数控实验平台的研究[J].计算机与信息技术,2010,12:86-87.
[2]耿宏涛,舒志兵.基于Vc的多轴运动控制卡软件开发技术研究[J].机床与液压,2007,35(11):130-133.
[3]薛迪,张金波,龙泽明.开放式数控系统实验教学平台的构建[J].机械管理开发,2012,12:183,185.
[4]田东红.激光打标机开放式数控系统的研究[D].天津大学,2006.
[5]芯钰科公司.YK8A04-P PCI总线四轴运动控制卡使用手册[Z].
[6]苏伟.基于PMAC的开放式数控教学平台的研究[D].天津大学,2005.;运动控制卡
中图分类号:TP311.52 文献标志码:A 文章编号:2095-2945(2019)25-0055-03
Abstract: The control system NC Teaching Platform is established by PC and motion control card. servo motors are controlled precisely by way of PC and motion control card working cooperatively. The interactive interface is established by Labview language on PC. By calling the motion control card library, the functions are achieved for example: speed control, circular interpolation, linear interpolation, G-code programming and other basic functions. The basic application CNC teaching of is met.
Keywords: CNC teaching platform; Labview; motion control card
