一种应用于自闭/贯通线的新型APF电流控制方法研究
2019-09-24
(石家庄铁道大学 电气与电子工程学院,河北 石家庄 050043)
0 引言
由于大量的直流电源和电力电子设备的应用,自闭/贯通线路的电能质量问题越来越严重,烧毁设备事件时有发生,谐波超标和无功不足成为其中最普遍的问题[1]。随着铁路方面越来越意识到电能质量问题的重要性[2],有源电力滤波器(APF)在铁路系统中的大规模应用成为可能。尤其以自闭/贯通线路为试验平台安装了很多APF设备,然而有些较为陈旧的APF设备上采用PI电流控制方法,已经不能适应APF的发展趋势和性能要求。
APF的主要优点是在负载突变等电网参数改变的情况下,依然能够根据谐波成分、大小的变化进行实时补偿[3]。由于常用的LC无源滤波方法虽然容量大,但需要提前知道电网参数,计算出谐波次数才能进行计算设计,APF的出现能够克服LC无源滤波器动态滤波能力不足的缺点。能否让输出电流精确快速地跟踪目标信号电流是APF设计中需要考虑到的重要问题。一些常用的控制方案都有其固有的优点和不足之处,滞环比较法的硬件试验电路搭建十分简便,跟踪实时性强、跟踪速度很快,但它会使变流器的开关频率具有很大的变化范围,且具有稳态误差。文献[4]~文献[6]对滞环比较法做出了改进,旨在消除其开关不固定的缺点,但都不能从根本上平衡精度和开关频率之间的关系。三角波调制方法和PI控制法结合运用的比较多,但同样不能避免稳态误差的出现,并且直流侧利用率低。滑模变结构控制方法具有控制精度高、鲁棒性强等优点,但是抖振问题一直无法得到解决[7]。文献[8]~文献[11] 分别从不同角度给出了几种较弱抖振的方法,但都不能从根本上消除抖振。
针对PI控制器稳态性能差、跟踪速度慢、精度低[12-13]的缺点研究了一种基于柔性变结构控制(SVSC)的变饱和SVSC控制方法。这种控制理论属于变结构控制(VSC)理论中的一种,能够在增强控制系统的精度、精简计算时间的同时,避免抖振的发生,使控制信号连续、平滑。
1 变饱和柔性变结构控制器
变饱和SVSC[14]是VSC发展的一个重要分支,它故意排除滑动模态,控制目标为达到较高的调解率和较短的整理时间。它能够根据系统状态持续改变自身控制策略进而改变结构以及参数,这样系统就可以尽量逼近时间最优控制的性能。
设APF状态方程为

(1)
考虑线性系统(1),控制参数u服从约束|u|≤u0,考虑其所有可能的初始向量x(t=0)的有限集x0。控制器由k1以及带有饱和项的k2构成
u=u1+u2
(2)
(3)
(4)
将可变限±us(x)加入饱和项中,可得
(5)
变饱和SVSC框图如图1所示。通过选择可变限us(x),使得us(x)=0对应于大状态变量 。对于大状态变量x,采用u1进行调节。

(6)
(7)
(8)
参数p是选择变量,用来确定式(6)中的线性子控制器。变换形式的VSC如图2所示。在控制环中,将式(6)代入式(1),得
(9)
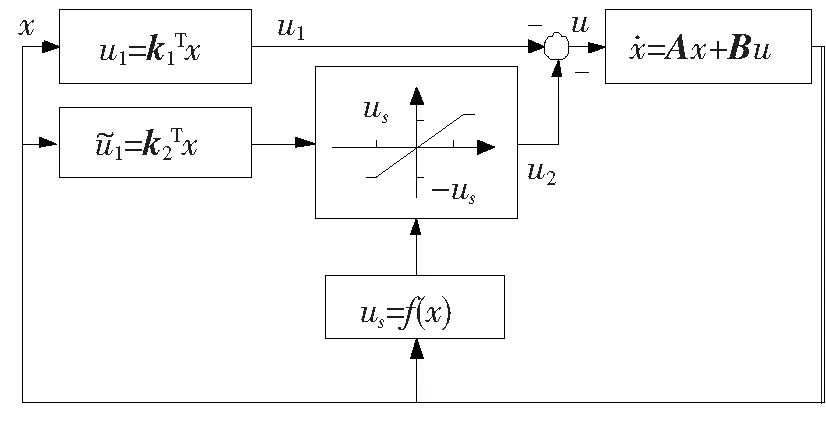
图1 变饱和SVSC框图

图2 改变形式的VSC
为了选择式(7)中的选择策略及可变限us(x),那么式(7)、式(9)必须满足以下条件[15]:
(1)|u|≤u0;
(2) 假定(1)条件得到满足,则控制系统式(7)、式(9)在平衡状态x=0必须稳定。并且从区域G={x|xTRX≤uG}出发的轨迹仅需保证在域内渐进稳定,不需在域内全局渐进稳定,R为正定阵。变饱和柔性变结构控制由APF状态方程(9)和控制器式(6)构成,即
(10)
由参考文献[14]可知
(11)
(12)
v(x)=xTRx
(13)
PI控制器针对简单的单输入、单输出的系统具有良好的效果,APF是一种多输入、多输出且较为复杂的非线性系统,传统的PI控制技术并不能在应用于APF时发挥出很好的性能。而变饱和SVSC理论采用状态方程法分析整个系统,对于APF这种较为复杂,耦合情况较为严重的系统,具有更好的适用性。SVSC控制器通过更改自身的控制策略进而改变结构以及参数,产生出无数个线性控制器,并且其参数跟随系统情况而变化,继承了线性控制器结构简单、反应迅速等优点,避免了滑模变结构控制的抖振问题。
2 仿真验证实验分析
为验证上述控制方法的有效性,对其进行了Matlab模型搭建与仿真,图3为搭建的APF模型。
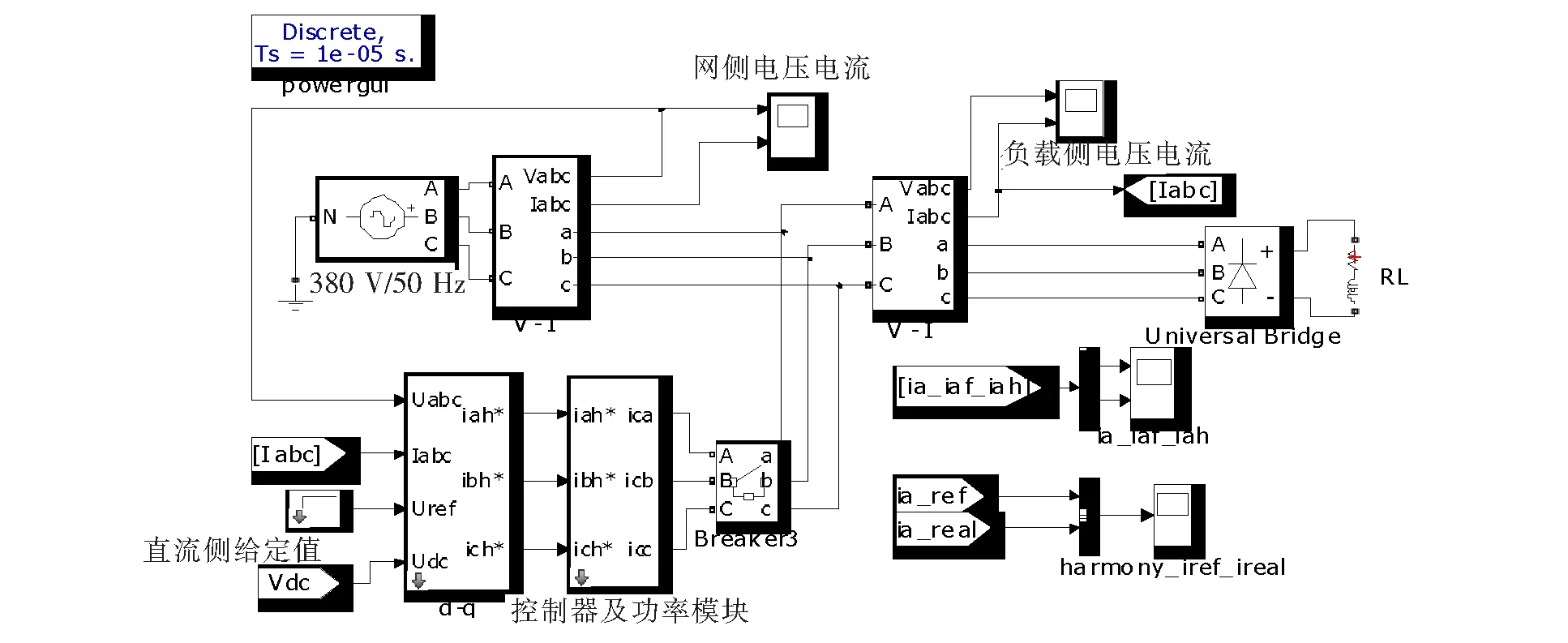
图3 APF整体仿真模型
由于仿真模型模块较多,所以采用子系统,其中d-q子系统为电流检测模块,其采用d-q检测法,这种检测方法是在瞬时功率理论的基础上发展而来。功率模块子系统中的电流跟踪控制器采用基于变结构理论的变饱和柔性变结构控制方法,如图4。
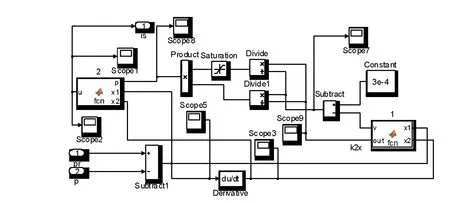
图4 变饱和柔性变结构控制器模型
具体的仿真实验环境参数为:三相电源网侧电压为380 V,频率为工频50 Hz,有源电力滤波器滤波电感为1.35 mH,滤波电容为0.66 mF,直流侧采用PI控制,电压给定值为700 V,负载采用一组三相不控整流桥带一组阻感负荷。
为体现上述方法的有效性,仿真实验采用一组对照实验组。对照实验组采用传统PI控制方法,其它实验条件参数等与柔性变结构控制方法相同,APF介入时间为40 ms。
补偿前的电网畸变电流如图5所示。经过Matlab仿真软件的FFT分析,如图6所示,其THD为24.72%。
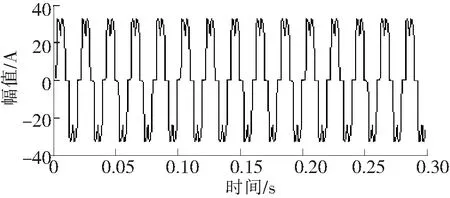
图5 APF未介入时α相畸变电流

图6 补偿前α相畸变电流FFT分析
(1)经采用传统PI控制方法的有源电力滤波器滤波后的电网电流波形如图7,APF于40 ms开始介入工作,此时电流产生了畸变并逐渐向正弦波过渡,在135 ms时电流稳定,基本趋近于正弦波,但波形尖端仍有较明显畸变,此时的THD下降为8.36%,如图8所示。图9为电流跟踪波形(PI控制器),其中虚线为被跟踪信号波形,实线为跟踪信号波形。从图中可以看出,APF介入后,跟踪信号产生较大超调,130 ms后逐渐进入稳定跟踪,跟踪速度较慢。
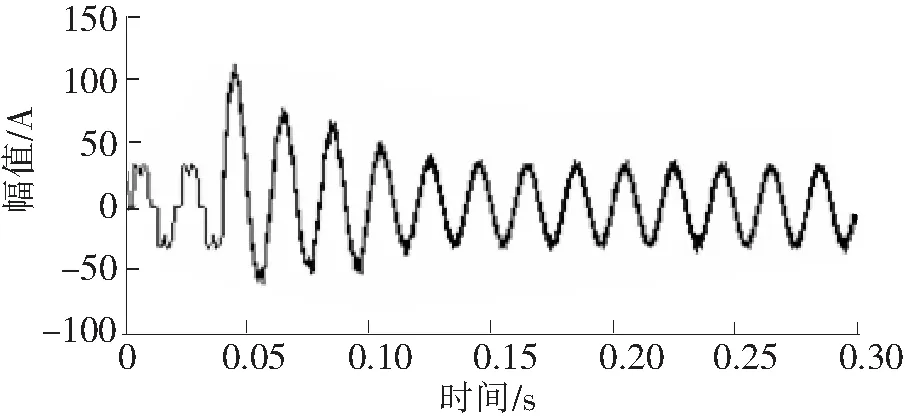
图7 补偿后负载侧电流(PI控制器)
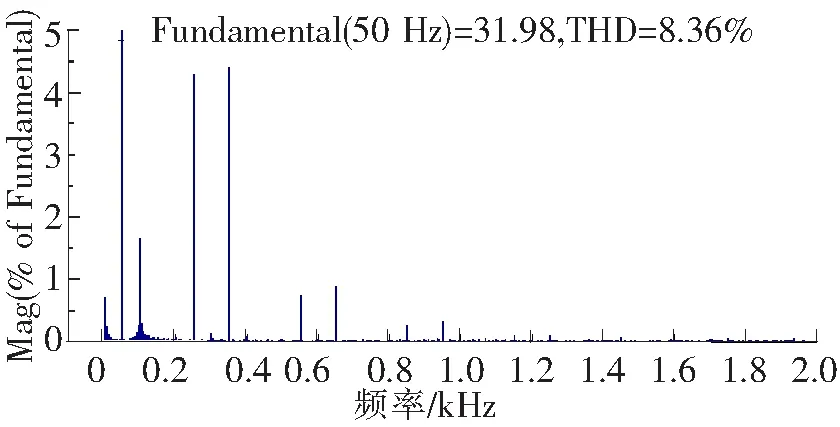
图8 补偿后a相负载侧电流FFT分析(PI控制器)
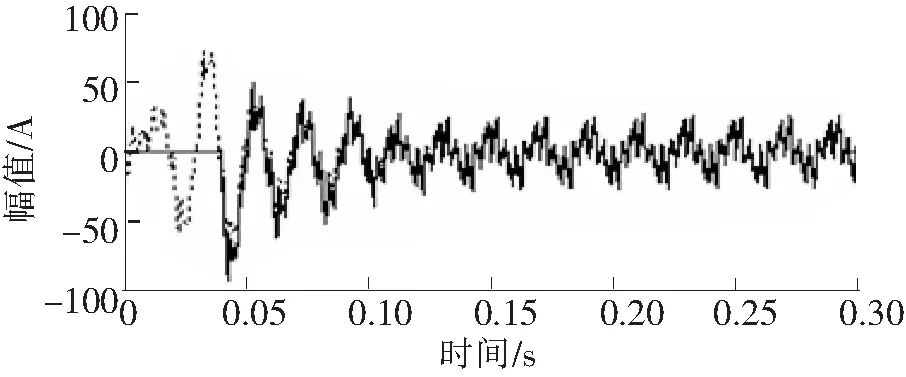
图9 信号电流跟踪波形(PI控制器)
(2)经采用变饱和SVSC控制器滤波后的电网电流波形图为10。 可以看出APF介入后,电流在80 ms由畸变电流过渡为正弦波形,波形尖端仍可见细微畸变,但已不明显,此时经Matlab分析其THD为4.97%,如图11所示。信号电流跟踪波形见图12,虚线为被跟踪信号波形,实线为跟踪信号波形,可以看出,APF介入时的超调大幅减小,电流78 ms后已基本稳定追踪信号电流,响应速度较快。
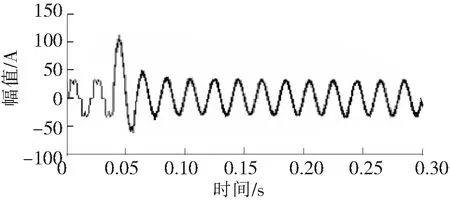
图10 补偿后负载侧电网电流(变饱和SVSC控制器)
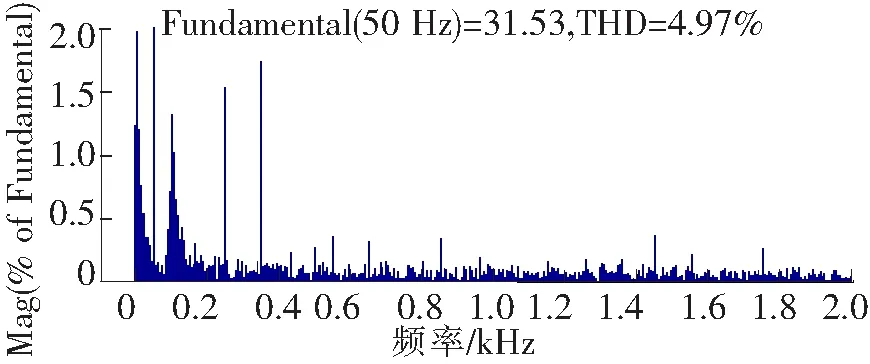
图11 补偿后a相负载侧电流FFT分析(变饱和SVSC控制器)
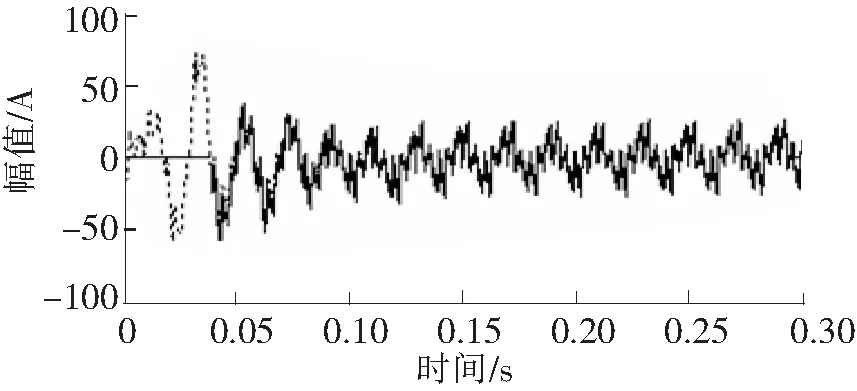
图12 信号电流跟踪波形(变饱和SVSC控制器)
表1为2种控制方法效果对比。

表1 2种控制策略效果对比
3 实验分析
为了进一步验证变饱和SVSC控制器能够在实际的应用中发挥作用,设计了APF硬件实验平台。
实验环境如下:电网侧线电压380 V,频率为工频50 Hz,三相交流,有源电力滤波器直流侧电压给定值700 V。
(1)负载为三相不控整流桥带阻感性负载。三相对称,对a相进行分析。由图13与图14的电流波形对比可知,补偿后电流波形有了很大改善,接近于标准正弦波。补偿后电流的谐波畸变率大为下降,谐波治理效果良好,且a相补偿后电流与a相电压无明显相位差,无功补偿效果显著。

图13 补偿前电网畸变电流波形及谐波分析

图14 补偿后电流、电网电压波形及电流谐波分析
(2)负载为实验室中复杂非线性负载混合。负载存在较低程度不对称,因此对三相进行分析。由图15与图16对比可以看出,电流畸变程度明显降低,谐波补偿效果明显。由于三相存在低程度不平衡,因此谐波补偿效果略有下降。

图15 补偿前畸变电流波形
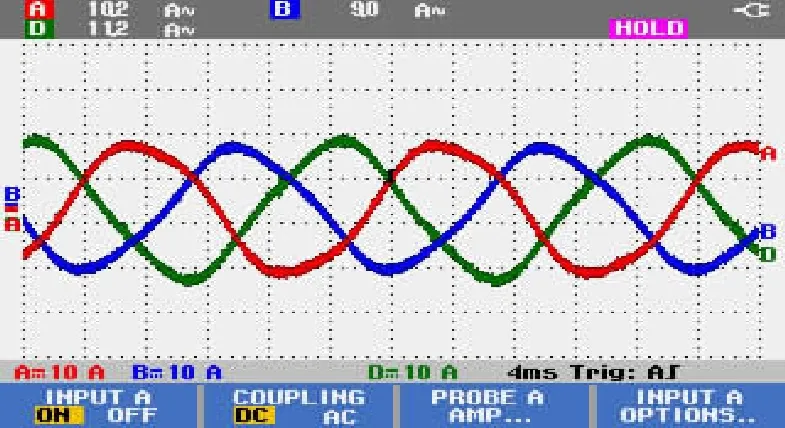
图16 补偿后的电流波形
4 结论
提出了一种基于变饱和SVSC方法的新型控制方法。通过与传统PI法的仿真对比试验,由电流跟踪控制波形的比较可以看出变饱和SVSC控制器跟踪迅速、反应时间短、精度高、无稳态误差。由有源电力滤波器介入后的负载侧电流波形可以看出,由变饱和SVSC控制器进行电流跟踪的APF畸变电流向正弦波形过渡的时间更短,稳定滤波后THD更低,滤波性能更好。硬件试验说明了此方法更具实用性,能够稳定运行于硬件系统。
