基于高频信号注入法的电流测量增益误差补偿
2019-09-20熊堡锐郭昊昊刘彦呈梁晓玲马亚楠
熊堡锐, 郭昊昊,刘彦呈,梁晓玲,马亚楠
(大连海事大学 轮机工程学院,辽宁 大连 116026)
0 引 言
相电流测量的精确性对于大部分高性能电动机来说至关重要,电流测量误差会导致定子电流出现暂态误差和稳态误差,两者都会直接影响转矩控制性能,从而导致转矩非线性,转矩和转速脉动,电流和转矩的脉动还会导致电动机产生额外的损耗[1-2]。
相电流测量过程由许多环节组成,如霍尔传感器,电压匹配环节,噪声过滤环节,A/D转换环节,这些环节中的一个或者几个由于设备容差,温度漂移,老化和噪声会导致电流测量误差的产生。相电流测量误差可以分为以下三类,每一类对电动机性能有不同的影响[3]。
第一类是三相之间的差值增益误差,三相之间的电流测量增益不相等,会产生一个基波激励负相序分量,如果测量的电流用于电动机控制,会导致转矩脉动,平均转矩降低,损耗增加,磁链估算出现误差。第二类是平均增益误差,各相电流测量增益相比标准值偏移相同的值,会导致定子电流增加或减少,使得转矩和磁链相比标准值增加或减少。第三类是电流测量偏移误差,会产生转矩脉动,转矩和磁链相比实际值增加或减少,此类偏移误差可以通过旋转矢量电压进行补偿,本文主要针对增益误差进行研究,因此不做赘述。
相电流测量的全部增益是电流传感器增益和其他各环节电气设备增益的总和,电气设备的增益即传感器增益和微控制器中数字信号增益[4]。这些增益会随着时间的变化而偏离理想值,电动机的良好控制性能要求这些误差在控制器内部被限制或者补偿。通常使用的方法是人工校准,人工校准可以在电动机的初始调试阶段或者周期性维护中实现硬件增益的调整和软件增益的调整[5]。虽然人工校准可以有效消除增益误差的影响,但是其自身有很多局限性,例如费用较高,减少了电动机的工作时间。因此,研究相电流测量误差的补偿算法很有意义。
近年来,许多学者针对相电流测量误差的补偿作出了大量的研究,补偿方法可以分为两类,第一类是处理电流测量误差带来的影响,第二类是估算出电流测量的增益误差或者偏移误差值并通过算法补偿。
本文针对永磁同步电动机相电流采样过程中存在的增益误差进行了研究,提出一种基于高频电压信号注入法的相电流测量增益误差补偿算法。使用该方法不再需要人工校准,不需要电动机已知参数之外的其他参数参与控制,通过仿真验证,该方法可以有效的消除电动机相电流采样环节中引入的增益误差。
1 高频电压信号的注入与电流载波信号的分离
1.1 高频电压信号的注入
旋转高频电压注入法已经在交流电动机的无位置传感器控制中广泛应用。在高频电压注入法中,高频载波电压信号(1)叠加在基频电压上,用于追踪电动机的空间凸极:
(1)
式中,Uc为载波电压信号的幅值;ωc为载波信号频率,上标s代表静止参考坐标系。
载波电压信号产生一个载波电流响应信号(2)(假设在高频下电动机阻抗为纯电感),只有当电动机存在非对称性的时候载波电流信号负相序分量存在,电动机的非对称性包括机械非对称(如d轴和q轴暂态电感不相等)和电流测量增益非对称(如不同相之间增益不同),本文的研究对象为隐极式永磁同步电动机,因此不存在机械非对称性。而载波电流分量正相序分量则一直存在,其大小会因为平均增益误差的变化而变化:
(2)

1.2 电流载波信号的分离
同步轴系滤波器的设计已经在基于载波信号注入的无位置传感器控制方法中广泛应用[6]。
本文使用同步轴系滤波器用于分离电流响应中的正相序分量和负相序分量。本文所使用的同步轴系滤波器如图1所示。

图1 同步轴系滤波器

2 电流测量增益误差的分析
当非凸极型电动机中注入一个三相平衡的载波电压信号(1)后,得到的电流响应表示为
iA=Iccos(ωct+φ)
(3)
(4)
(5)
式中,Ic为载波电流信号的幅值;φ为电流矢量和电压矢量之间的夹角。
只要上式中的载波频率ωc比电动机的定子暂态时间常数至少大一个数量级,电动机的阻抗可以被认为是纯电感,因此相角φ可以近似为-π/2,同时载波电流信号的幅值Ic取决于定子暂态电感[7-8]。

(6)
(7)
式中,iA_meas为A相电流测量值;iB_meas为B相电流测量值。
为了分析电流测量增益误差带来的影响,首先通过Clark变换把电流从三相静止坐标系变换到两相静止坐标系,如式(8)、式(9)所示
(8)
(9)
定义式(10)用于将载波电压信号(1)作用下获得的dq轴载波电流响应组合成复合矢量形式:
(10)
通过式(3)、式(4)、式(8)、式(9)、式(10)可以得出αβ轴载波电流响应组合矢量形式如下:
(11)
同时我们知道式 (11)、式(12)、式(13)如下所示
(12)
(13)
(14)
利用式(12)、式(13)、式(14)将式(11)展开并化简,可得式(15)如下所示:
(15)

在高频信号作用下,电动机的阻抗可以近似为纯电感。此时,电流滞后电压相角为π/2[7-8],式(15)中的指数因数可以修正为式(16)、式(17)所示:
ej(ωct+φ)=jejωct
(16)
e-j(ωct+φ)=je-jωct
(17)
将式(16)、式(17)代入式(15),化简可得
(18)
通过分析式(18)可知,所测得的载波电流信号由正相序分量和负相序分量组成,正相序分量和负相序分量可以分别表示为
(19)
(20)
正相序分量和负相序分量分别包含对电流测量增益误差补偿有用的信息[9]。其中负相序分量由两相之间增益率不平衡而产生,如果两相之间的增益率相等:
(21)
此时负相序分量为零。这种情况同时还消除了正相序分量的一项,保留的正相序分量为
iqds_pc=-j∑Kejωct
(22)
用于调整A、B两相的增益率至其参考值。
通过上述分析可知,测得的负相序载波电流信号可以用于平衡两相之间差值增益偏差,测得的正相序载波电流信号的大小可以用于修正平均增益误差。
3 电流测量增益误差的补偿
本文提出的基于高频信号注入法的相电流增益误差补偿算法框图如图2所示。

图2 补偿算法结构图
首先把测得的式(18)中的正负相序载波电流信号通过park变换分别变换到正负相序同步参考坐标系:
(23)
(24)

经过补偿过后的相电流测量值为
(25)
(26)
4 实验结果
为验证上述的基于高频信号注入法的电流测量增益误差补偿方法的有效性及动静态性能,搭建基于Matlab/Simulink的永磁同步电动机矢量控制系统模型。
本文仿真所用的永磁同步电动机参数如表1所示。

表1 永磁同步电动机参数
本文采用了id=0的矢量控制策略,使用PI调节器的性能如图3所示。
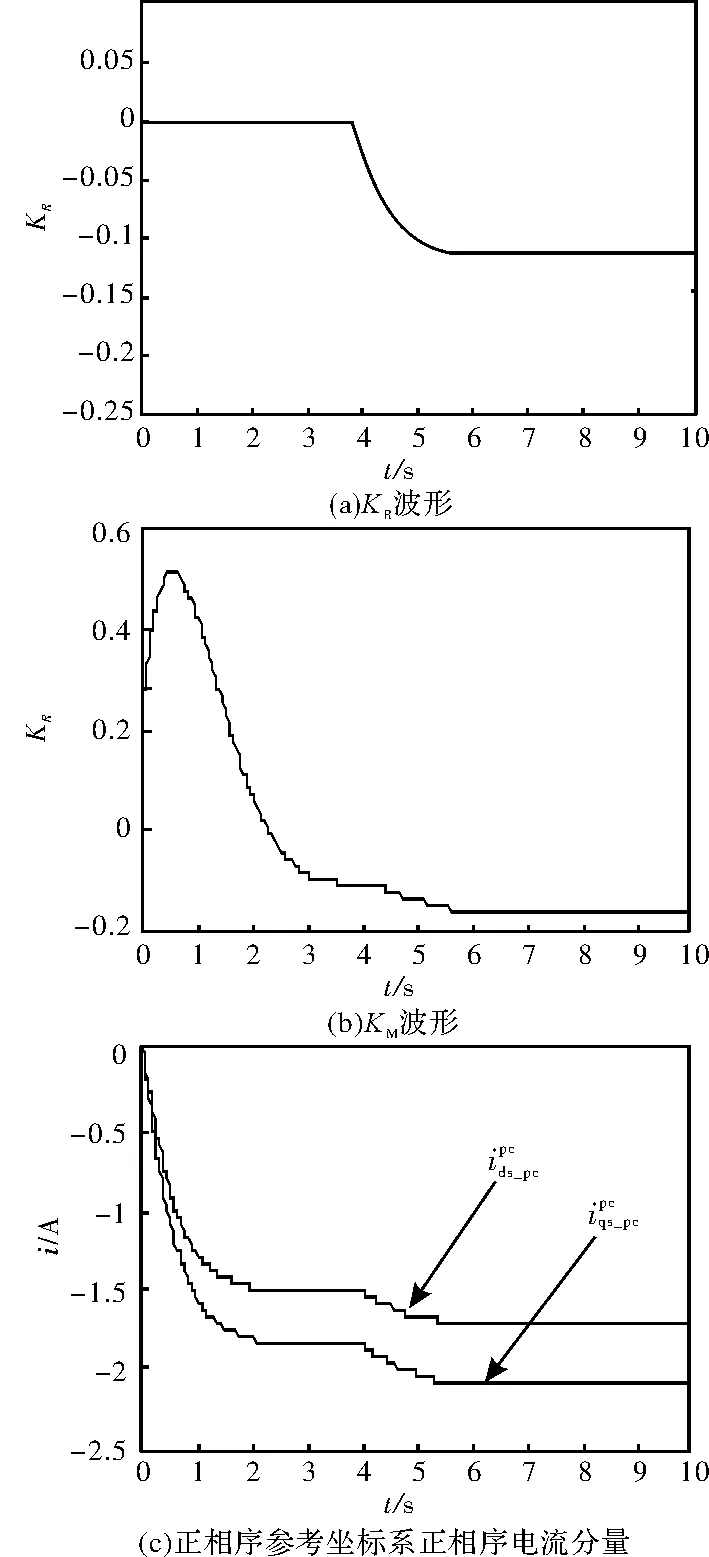
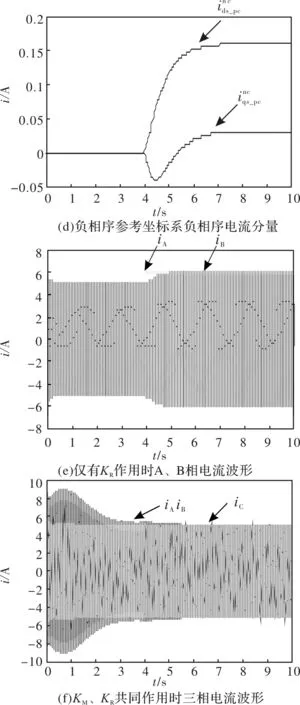
图3 本文补偿系统的性能
从图3(f)中可知,这种增益误差补偿方法会导致相电流测量增益值的在线改变,进而改变电流闭环控制增益,会影响电流闭环控制系统的动态过程,但不会影响稳态过程,因此,只需要进行限幅,保证相电流不超过额定值即可。
5 结 论
本文针对相电流采样环节的增益误差作出研究,并提出一种基于高频信号注入法的相电流增益误差补偿方法。电流测量增益误差使得正相序载波信号和负相序载波信号发生变化,负相序分量的相角用于补偿差值增益误差,正相序分量的大小用于修正电流测量平均增益误差。
通过仿真验证了本文提出的方法的有效性,本文提出的方法可以有效的修正电流测量增益误差,增加电流测量的精确性。从而保证电动机正常运转。同时,本文提出的方法能够使用精度较低,价格较低的电流传感器而不影响测量的最终精度[10]。具有一定的理论深度及实用价值。