一种新的无人机载雷达非均匀杂波抑制方法
2019-09-19陈洪猛易晓丽穆贺强鲁耀兵
陈洪猛,刘 京,李 明,易晓丽,穆贺强,鲁耀兵
1)北京无线电测量研究所,北京 100854;2)西安电子科技大学雷达信号处理国家重点实验室,陕西西安 710071
机载雷达作为一种对地观测的重要传感器系统,具有全天候、全天时、高分辨的特点[1].随着未来战场环境的日趋复杂,未来战争对机载雷达也提出了更多的需求.机载雷达系统不仅要具备对地面监视场景进行高分辨的快速成像能力,能够从中寻找出有价值的固定目标,且进行深入识别与分析;同时,机载雷达系统还应具备检测地面/海面慢速运动目标的能力,能够对潜在的运动目标进行检测定位,并进行运动目标的分类.在海湾战争期间,美国联合监视目标攻击雷达系统(joint surveillance target attack radar system, JSTARS)多次成功监视了伊拉克地面部队的调动以及移动的导弹发射架,为作战指挥官提供了重要的情报参考[2];英国的机载运程侦察雷达(air borne stand off radar, ASTOR)系统[3],德国、法国、意大利、西班牙及荷兰联合开发的机载监视雷达SOSTAR-X系统[4],以及德国高频物理与雷达技术研究所研制的多功能相控阵成像雷达(phased array multifunctional imaging radar, PAMIR)系统均具备相似的能力[5-6].这些系统的共同点就是将雷达成像功能与雷达动目标检测功能有效的结合在一起,利用合成孔径雷达(synthetic aperture radar, SAR)或多普勒波束锐化(Doppler beam sharpening, DBS)进行成像来发现地面/海面上的静止目标,利用地面运动目标指示(ground moving target indicator, GMTI)检测运动目标,并将运动目标定位标注在SAR/DBS图像上.通过两者的协同工作,可实现对地面场景的高分辨监视成像和对感兴趣运动目标的实时跟踪定位.
机载雷达地面运动目标检测面临的最大问题是机载雷达下视工作时杂波谱会展宽.如果不对杂波进行抑制,低速运动目标容易被淹没在强杂波背景中,大大降低了对地面慢速运动目标的检测概率.为了实现对运动目标的有效检测,首先需要进行杂波抑制.TOPORKOV等[7-9]报道了基于沿航迹干涉(along track interferometry, ATI)和相位中心偏置天线(displaced phase center antenna, DPCA)的杂波抑制方法.TONG等[10-11]介绍了空时自适应处理(space-time adaptive processing, STAP)的基本原理及改进方法.YANG等[12-15]深入研究了STAP方法并给出了其降维形式.HAN等[15]详细对比了各种杂波抑制算法,为后续GMTI的实际工程应用奠定了基础.基于一组实测数据,ZHANG等[17]系统分析了SAR-GMTI的运动目标检测性能.为进一步提高机载雷达抑制杂波性能,WANG等[18-20]分析了非理想条件下的杂波特性,并给出了相应的杂波抑制方法.然而,上述研究在进行杂波抑制时,主要考虑到外界环境的各种先验信息,未充分考虑到雷达检测过程中雷达数据本身所隐含的先验信息.
针对机载非均匀环境下的下视杂波抑制问题,特别是无人机载平台下的雷达系统受限于载荷成本、体积和重量等因素的约束,空域接收通道的数目和计算资源非常宝贵,因此可用来进行杂波抑制的空域自由度是非常有限的.本研究提出一种基于恒虚警样本选择策略的机载雷达非均匀杂波抑制方法,对于无人机载双通道雷达系统,充分考虑到雷达信号处理过程中恒虚警处理(constant false-alarm rate, CFAR)检测到的孤立杂波和运动目标信息,并将其作为先验信息嵌入到杂波抑制过程中.首先,将多普勒域局域化的杂波沿距离向进行分段,以抑制杂波的非均匀性.同时,采用低门限CFAR策略提取孤立的强杂波散射点和疑似运动目标.然后,将这些孤立的强杂波散射点和疑似运动目标从训练样本集中剔除,估计协方差矩阵,进行空时滤波器权向量计算.最后,采用空时两维联合滤波,对地杂波进行抑制.实测数据处理结果表明,本研究提出的方法可提高对非均匀杂波的抑制能力,且适合工程应用.
1 信号模型
假设机载相控阵雷达天线是一个平面阵列天线,天线阵面与地面某杂波块P之间的几何关系如图1.其中,载机的飞行速度为v, 载机平台的高度为H. 天线阵面轴向与载机飞行速度方向的夹角α定义为偏置角.当α=0°时,雷达工作在正侧视模式; 当α=-90°时,雷达工作在前(后)视模式.雷达与地面某杂波块P之间的瞬时斜距用Rl表示,该杂波块相对于雷达的方位角和俯仰角分别为θ和φ.
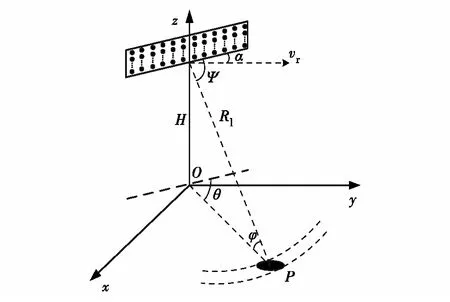
图1 机载雷达观测几何构型Fig.1 Geometry of airborne radar
机载相控阵雷达采用矩形平面阵列,经过俯仰维的加权处理后可等效为一个N元线阵,阵元间距为d. 假设雷达在一个相干处理间隔(coherent process interval, CPI)内发射一组脉冲串,每组脉冲串包含M个子脉冲.每个脉冲回波在快时间维有L个距离采样.假设第l个距离门第n个阵元第m个脉冲的空时快拍量为xn,m,l, 则第l个距离门的空时快拍为一个M×N维的采样复矢量[10-12]:
xl=[x1,1,l,x2,1,l, …,xN,1,l,xN,2,l, …,
x1,M,l,x2,M,l, …,xN,M,l]T
(1)
每一个空时快拍由杂波、干扰、热噪声及可能的目标构成,此时该雷达接收系统可描述为一个二元假设检验问题,即
H1:xl=αls+cl+nl
H0:xl=cl+nl
(2)
其中, H1和H0分别表示目标存在和目标不存在的情况;al为目标信号的复幅度;cl和2nl分别为杂波和噪声向量;s为目标信号的空时导向矢量,即
s=ss⊗st
(3)
这里,符号⊗表示Kronecker积;st和ss分别为时间和空间导向矢量[10-12]
ss=[1 exp(j2πfs) … exp(j2π(N-1)fs)]T
(4)
st=[1 exp(j2πft) … exp(j2π(M-1)ft))]T
(5)
其中,ft=2vt/(λfr[0])和fs=dcosθt/λ分别表示目标的归一化多普勒频率和归一化空间频率;vt为运动目标的径向速度;θt为运动目标相对于雷达的方位角.
为提高杂波背景下对期望目标的检测性能,STAP技术基于最大化输出信干噪比(signal interference noise ratio, SINR)准则,设计了一组空时滤波器系数.图2给出了一种通用的机载雷达STAP构型[10-11].
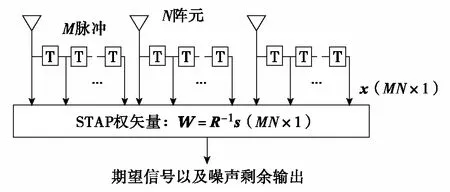
图2 机载雷达STAP构型[10-11]Fig.2 STAP architecture for airborne radar[10-11]
全空时处理器的数学模型可描述为
(6)

(7)
其中,xl为待检测单元附近的无强杂波散射点或疑似目标污染的训练样本;L为训练样本数.
采用拉格朗日乘子法求解式(7),可得最优空时权矢量为
wopt=μR-1s
(8)
其中,μ为任意常数.要保证相对最优空时滤波器性能的平均SINR值损失不超过3 dB,所选样本单元数就必须满足L>2MN. 然而,在实际环境中,具有独立同分布(independent identically distributed, i.i.d.)统计特性的训练样本单元数量是有限的.因此,减少训练样本单元数,开发适用于工程应用的降维STAP处理被广泛研究[10-15].在降维STAP算法中,一般采用D×(M×N)维的降维矩阵T, 把M×N维的回波数据降维到D维的数据空间(通常情况下D=M×N), 则降维后的回波数据为
xr=Tx
(9)
其中,x为降维前的空时快拍向量;xr为降维后的空时快拍向量.
降维后总干扰的协方差矩阵为
(10)
其中,E()为期望函数,相应的自适应权矢量为
(11)
其中,sr=Ts是变换后的空时导向矢量.
降维STAP处理的协方差矩阵可由降维后的回波数据估计[10-15]得到
(12)
其中,xrl=Txl表示降维处理后的训练样本单元.
通常情况下,降维矩阵T可从空域维度进行设计,也可从时域维度设计.不同的降维矩阵本质上代表了不同的降维方法.本研究主要考虑工程中一种较为实用的时域降维方法,即先时后空自适应级联处理方法.若参与处理的多普勒通道数为m, 则记为mDT-STAP[10-11].通常情况下,m=3, 即3DT-STAP方法.
2 基于CFAR策略的STAP
以上讨论的是理想情况下的杂波抑制方案,然而在实际情况中,杂波在空间上的分布不可能完全满足均匀缓变的假设(如水陆交界处、城乡结合部和山地平原交汇处等场景);同时,由于场景中不可避免的存在一些孤立的强散射点的影响(如铁塔、桥梁、水泥建筑物和运动目标等),都会使得地杂波呈现出非均匀特性.若在训练样本时选择不考虑场景的这些非均匀特性,特别是在训练样本中包含了一些孤立的强杂波及干扰散射点时,杂波抑制性能将会大幅下降.为此,本研究提出一种基于分块恒虚警样本选择策略的非均匀杂波抑制方案.
2.1 基于距离分块策略的样本选择
为尽可能地保证杂波在局部的范围内近似满足均匀假设,本研究将要检测的样本单元在距离上分成几块,从而使每一个距离段内的杂波统计特性尽可能地保持一致.然后,采用该距离段内的样本单元估计得到协方差矩阵,并计算得到一个自适应权值.为减少计算量,将该段数据的所有距离门都采用这个自适应权值进行检测.需要说明的是,这种计算量的减少是以杂波抑制性能的下降为代价的.距离分段的具体过程为
(13)
其中,p为沿距离方向进行分块的块的数目;q为每个距离分块的大小,满足p=L/q,L为所有距离单元样本的总数;xr,l=Txl, 表示经过时域降维后的采样样本.此时,自适应权系数为
(14)

2.2 基于恒虚警策略的样本选择
当杂波、噪声背景环境下存在干扰时,对于非均匀样本,则有
xl=cl+nl+δJl
(15)
其中, δJl为由非均匀环境引起的附加干扰项.
经过降维处理和距离分段后,非均匀样本可描述为
xr,p,l=cr,p,l+nr,p,l+δJr,p,l
(16)
其中,cr,p,l和nr,p,l分别表示降维分块后的杂波和噪声向量; δJr,p,l为对应的附加干扰项.此时的协方差矩阵可写成:



(17)

如前所述,样本中如果存在孤立的强杂波及干扰散射点,会破坏杂波的统计特性,影响协方差矩阵的估计精度,从而降低杂波抑制效果.为尽可能地消除孤立的强杂波及干扰散射点的影响,本研究提出一种基于CFAR方法的样本筛选方法.该方法是一种有效的目标检测方法,可保证在一定虚警概率的情况下检测出疑似目标,而不受周围杂波背景环境幅度的影响.
采用低门限的恒虚警方法对杂波进行检测,从距离分段的样本中粗略的检测出疑似运动目标δTl, 并将这些疑似目标的样本在训练样本中剔除,则此时的训练样本可表示为
xr,p,l′=cr,p,l+nr,p,l+δJr,p,l-δTl
(18)
其中, δTl表示采用CFAR策略检测出来的强杂波散射点和疑似运动目标.
图3为算法的流程框图.

图3 本研究方法的STAP处理流程图Fig.3 STAP flowchart of the proposed algorithm
2.3 杂波抑制性能分析
为对所提方法的杂波抑制性能进行定量分析,对采用CFAR策略筛选出的训练样本进行协方差矩阵估计,表达式为

(19)

(20)
此时,经过CFAR策略筛选后的样本估计的协方差矩阵将趋于真实的杂波和背景噪声协方差矩阵.为尽可能满足上述条件,以下实验将在强杂波散射点和疑似运动目标筛选时采用低门限的CFAR策略.
3 实测数据结果与分析
为验证本算法的有效性,采用一组无人机载雷达录取的实测数据进行分析.该雷达工作在广域GMTI模式下,系统仅2个空域接收通道,用以形成和、差两路信息.部分系统参数设置为:带宽为18MHz、时宽为50μs、载机平台运动速度为61m/s、波束宽度为1.2°、扫描角范围为-60°~60°、仰俯角为5°、方位向采样点数量为128个、距离向采样点数量为4096个.
图4(a)为常规脉冲多普勒(pulseDoppler,PD)处理后距离-多普勒图.由图4(a)可见,地杂波很强,且分布在距离-多普勒平面非常大的区域内.图4(b)和(c)为采用传统的1DT-STAP和3DT-STAP处理后的结果.由图4(b)和(c)可见,杂波的主瓣得到了一定的抑制.图4(d)为本算法的处理结果.由图4(d)可见,主瓣杂波得到了很好的抑制,且处理后的杂波剩余最少,说明本算法有效.
图5显示了第50号多普勒单元分别采用不同方法进行地杂波抑制之后的效果图.为定量分析不同算法的杂波抑制性能,将每种算法进行后续的目标检测,本实验分别采用快门限和慢门限方法进行目标检测(实验中快门限和慢门限对应的虚警率均为Pfa=1×10-5).从图5(a)可见,常规的PD处理无法检测出位于主瓣杂波区附近的运动目标;从图5(b)可见,1DT-STAP处理虽然可对杂波进行一定地抑制,但只能在慢门限准则下才能被检测到,在快门限准则下无法被检测出来;从图5(c)可见,经过3DT-STAP处理后,主瓣杂波得到很好抑制,无论采用快门限准则还是慢门限准则,目标都可以被检测出来;从图5(d) 可见,本研究方法可进一步提高检测性能,目标幅值比常规的3DT处理方法的快门限和慢门限分别提高了4.20dB和2.97dB.

图4 不同方法处理后的杂波剩余结果对比Fig.4 (Color online) Comparison of clutter residual results after different processing methods
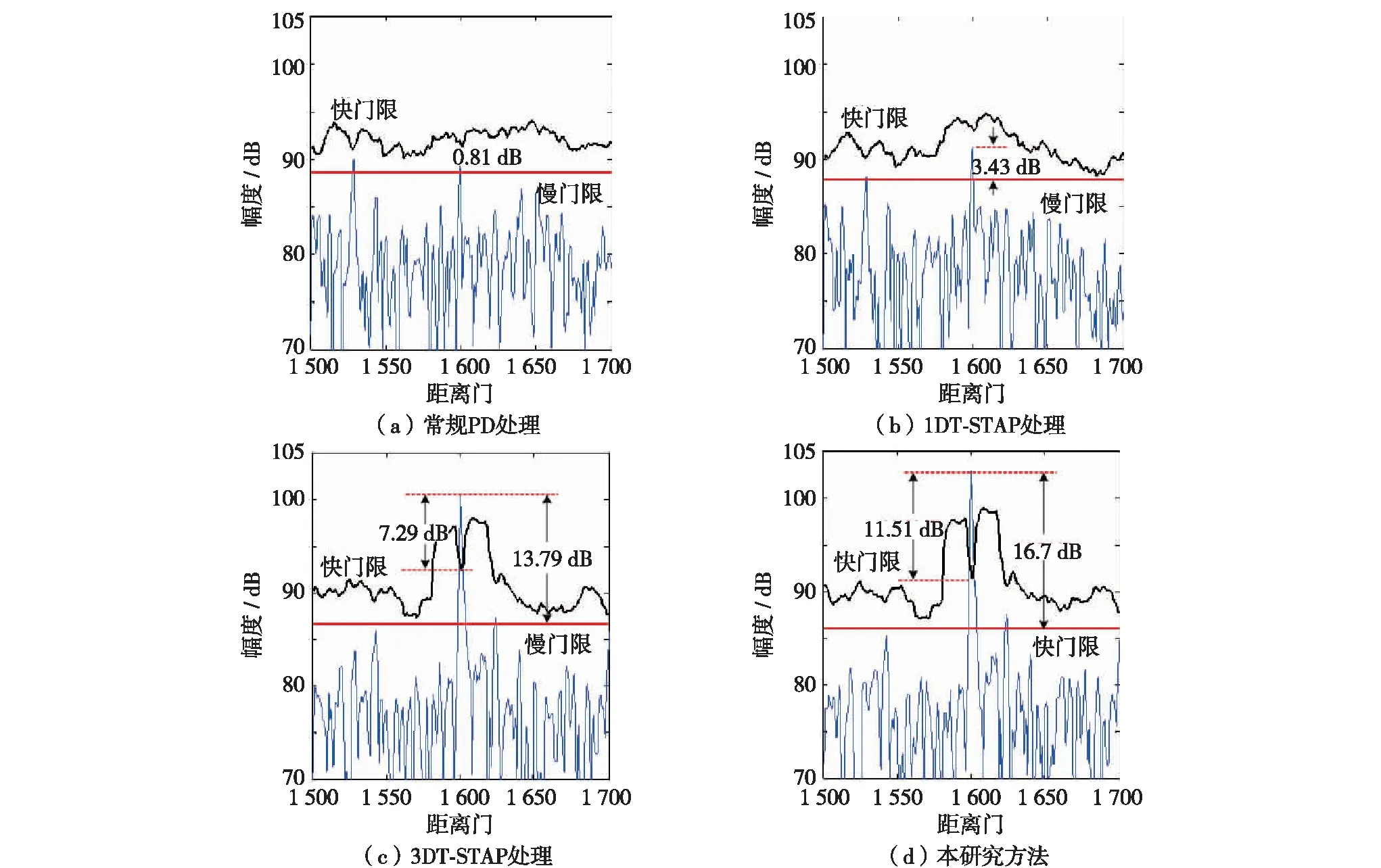
图5 不同方法处理后某一多普勒通道的杂波抑制结果对比Fig.5 (Color online) The Doppler profile of clutter suppression results of different methods
从图5还可见,PD方法和1DT-STAP方法无法在快门限下将目标检测出来,并且PD方法和1DT-STAP方法检测出的目标幅值高于慢门限下只有约0.81dB和3.43dB,在进行目标检测很容形成漏警.而3DT方法和本研究方法在快、慢门限背景下都可将目标检测出来.且本研究方法检测出的目标幅值分别高于快门限和慢门限约11.51dB和16.76dB,远大于3DT-STAP方法的7.29dB和13.79dB.因此,在虚警率Pfa=1×10-5的快门限和慢门限统计前提下,本研究方法比3DT-STAP方法检测性能分别提升了4.20dB和2.97dB,更易实现对运动目标的有效检测.基于实验数据的统计结果验证了本研究方法的有效性.
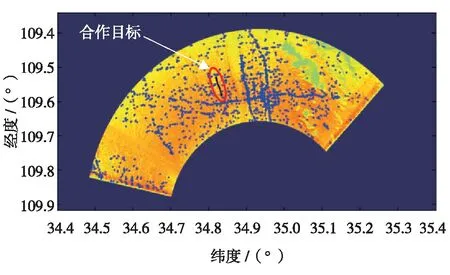
图6 雷达成像及运动目标检测定位结果图Fig.6 (Color online) The radar imaging and target relocation results
为进一步验证本研究方法的有效性,采用该组实测挂飞数据进行目标的多帧检测处理.雷达波束照射区域为载机正前方±60°区域.图6给出了对该区域的成像结果及相应的运动目标检测和定位结果.由图6可见,该成像区域包含了乡村、城镇及山区的场景,且成像场景中包含了多条由国道和省道组成的高速公路网,以及由一些零星的乡村道路组成的公路网.检测到的运动目标主要分布在高速公路网和城镇道路网上,其他区域虽然也有零星目标出现,主要分布在乡村的田间小路上.合作的运动目标几乎都分布在合作道路上,证明本方法有效.
需要说明的是,由于本研究方法的实时性处理能力较高,在样本单元的奇异值选取时采用的是单元平均CFAR(cellaveraging-constantfalsealarmrate,CA-CFAR) 处理策略,在非密集目标场景下该方法效果较好;但对于密集目标场景,本研究方法的处理效果会有所下降,因此,采用CFAR的其他改进方法(如单元平均选大CFAR(greatestof-constantfalsealarmrate,GO-CFAR)、单元平均选小CFAR(smallestof-constantfalsealarmrate,SO-CFAR)和有序统计量CFAR(orderstatistics-constantfalsealarmrate,OS-CFAR))进行强杂波和孤立干扰等奇异值样本的剔除,提高密集环境下的非均匀下视杂波抑制能力,将是我们下一步着重研究和考虑的方向.
结 语
提出一种基于CFAR样本选择策略的非均匀下视杂波抑制方法,通过采用距离向的分块策略较好的解决了训练样本单元沿距离向的空变问题.同时通过采用低门限的CFAR策略筛选出样本单元中的奇异值点,大幅提高了训练样本的协方差矩阵估计精度.最后,结合一组实测挂飞数据分析了不同的杂波抑制方法的效果,实测数据的处理结果验证了本研究方法的有效性.
