环行铁道城轨试验线列车位置实时监测方案研究
2019-09-19柴金川张金月
柴金川,张金月,张 郧,于 海,杨 铎
(中国铁道科学研究院集团有限公司 国家铁道试验中心,北京 100015)
环行铁道城市轨道交通试验线(简称:城轨试验线)作为城市轨道交通综合试验平台,在城轨领域科研试验发挥着重要作用。城轨试验线正线全长8.63 km,其中,地面线长6.92 km,高架桥长785 m,隧道长925 m,夹直线长度为1 463 m。城轨试验线沿线铺设光缆槽道及光缆,并配置了采用IEEE802.11g WLAN车地无线通信承载的国产MTC-I型CBTC系统和计轴系统,沿城轨试验线每隔300 m左右设置无线接入点(AP)并采用A/B双网覆盖,城轨试验线平面图如图1所示[1]。随着城轨科研试验需求的增加,城轨试验线承载的试验任务越来越多,需要通过实现列车位置监测功能,扩展城轨试验线多维试验空间,并提高保障城轨试验线试验安全的能力。
目前,国内外轨道交通中列车定位方式主要包括传感器定位[2]、轨道电路定位[3]、计轴系统定位[4]、无线网络定位[5]、卫星定位[6]以及移动装备运行行程定位方式等。在我国轨道交通运营中,除青藏铁路采用了基于GPS和列车惯性辅助定位方式[7]外,铁路CTCS-3系统采用传感器加列车惯性辅助定位方式[8],铁路CTCS-0至CTCS-2列控线路以及站场均采用轨道电路定位方式;城市轨道交通CBTC系统采用传感器加列车惯性辅助定位方式[9],CBTC降级及站场采用轨道电路或计轴系统定位。上述每一种定位方式都有特定的适用场景,且每一种定位方式都存在不同特征和性能。本文通过综合分析现有各种定位方式的应用场景及特征、性能,结合城轨试验线既有实际环境,提出城轨试验线可以采用分布式光纤振动定位方式[10]和增强系统卫星定位方式[11],通过验证表明,这两种方法在城轨试验线列车定位监测中具有较好的适用性,可以作为现有技术手段的有效补充,在城轨试验线列车定位监测中发挥重要作用。
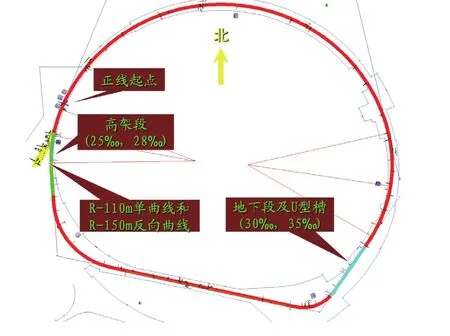
图1 城轨试验线平面示意图
1 典型定位方式分析
1.1 RFID传感器定位方式
1.1.1 基本原理
射频识别(RFID,Radio Frequency Identification)传感器是一种通过无线电信号识别特定目标并读写相关数据的自动识别技术。RFID 传感器具有使用寿命长、环境适应性好、无需识别系统与特定目标之间建立机械或者光学接触等优点。RFID传感器由射频标签、阅读器及天线3部分组成。射频标签附着在目标对象上,并由唯一的电子编码标识目标;阅读器是一种用于读取(有时也可以写入)射频标签信息的手持或固定设备;天线用于阅读器和射频标签之间利用发射或接收射频信号而传递信息。具体工作原理为:射频标签感应到阅读器的射频信号磁场后,将感应到的磁场能量转换成存储在芯片中信息的信号(无源标签)发射出去,或主动将某一频率的信号(有源标签)发射出去;阅读器接收到射频标签信号后,经过解码和数据处理转换成相应的信息并作出相应的动作。RFID 基本工作原理如图2所示。

图2 RFID传感器组成
1.1.2 适用性
RFID传感器仅能实现不连续的点式定位,不适用于单独承担城轨试验线列车定位。
1.2 铁路CTCS-3与城轨CBTC的列车定位方式
1.2.1 基本原理
铁路CTCS-3与城市轨道交通CBTC的列车定位原理基本相同,如图3所示。列车通过应答器与列车惯性定位结合获得当前位置信息,并利用无线通信平台将实时位置信息传输到地面系统。具体工作原理为:列车首先在某点获得位置信息,并在运行过程中通过列车上安装的传感器监测获得列车运行速度、时间、距离计算出当前列车的位置。由于列车在运行过程中会出现位置计算的误差累计现象,因此需要在轨道上每隔一段距离安装一组应答器使列车在应答器处进行位置校准。铁路CTCS-3与城市轨道交通CBTC的列车定位可实现车上和地面同时监测列车位置信息,但对列车自身惯性定位系统依赖较高。
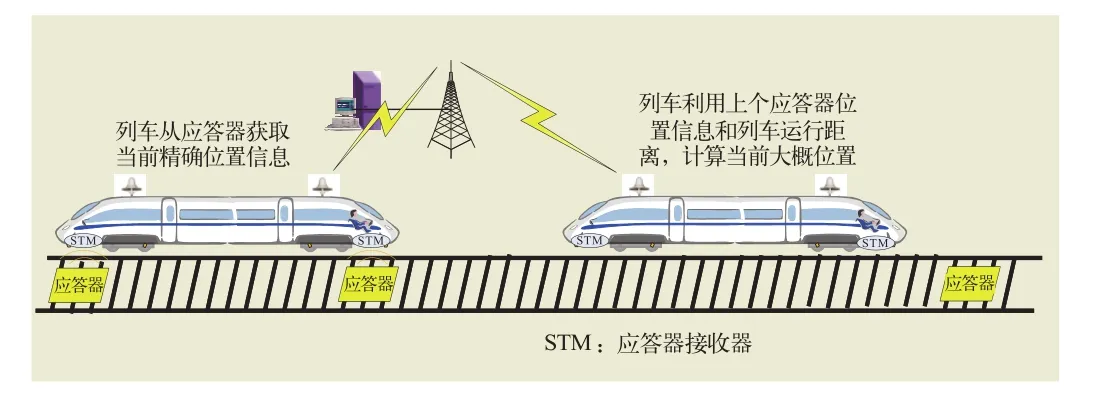
图3 铁路CTCS-3与城轨CBTC的列车定位原理示意图
另外,铁路和城市轨道交通中检测车的检测数据定位与铁路CTCS-3和城市轨道交通CBTC列车定位的原理相同,不同之处为将安装在轨道上的应答器改为安装在接触网杆或隧道壁上的电子标签(一种RFID传感器)。相对于应答器,通常电子标签设置密度较大,且间隔相对较均匀,连续定位的精度比CTCS-3和CBTC略强。
1.2.2 适用性
国内各地方各城轨线CBTC制式众多,且兼容性较差,城轨试验线既有CBTC仅能与具有相同车载CBTC制式列车匹配,与国内大多数城轨列车车载CBTC制式不匹配。如果利用CBTC实现所有列车定位,或者花费大量资金在地面配置多种制式CBTC系统,或者购买既有地面系统相匹配的车载CBTC定位系统并与试验列车既有系统互联互通。在地面配置多种制式CBTC系统且仅为实现列车定位意义不大,因此不予考虑。购买既有地面系统相匹配的车载CBTC定位还需与每一辆城轨试验列车车载系统相匹配,可操作性较低,因此也不予考虑。
铁路CTCS-3的列车定位与CBTC的列车定位方式等效,且城轨试验线及城轨列车均无CTCS-3设备。因此铁路CTCS-3的列车定位不适用于城轨试验线。
基于电子标签和列车惯性的定位方式目前仅限于检测列车应用,城轨试验线承担检测列车试验较少,可考虑作为检测列车的定位方式。
1.3 计轴系统与轨道电路系统定位方式
1.3.1 基本原理
计轴系统定位方式为将轨道划分成许多区间,并在区间的两端同时设置一组车轮传感器即计轴探头,当列车的金属车轮经过计轴探头时,计轴探头会感应到车轮通过并能判断出通过列车车轮的数目,并将检测到的车轮信息经电缆传到计轴主机,如图4所示。计轴主机根据检测到的数据即可计算出进入该区间和离开区间的车轮数量,通过比较分析,给出区间的空闲或占用,从而根据列车所在的区间判断列车位置。
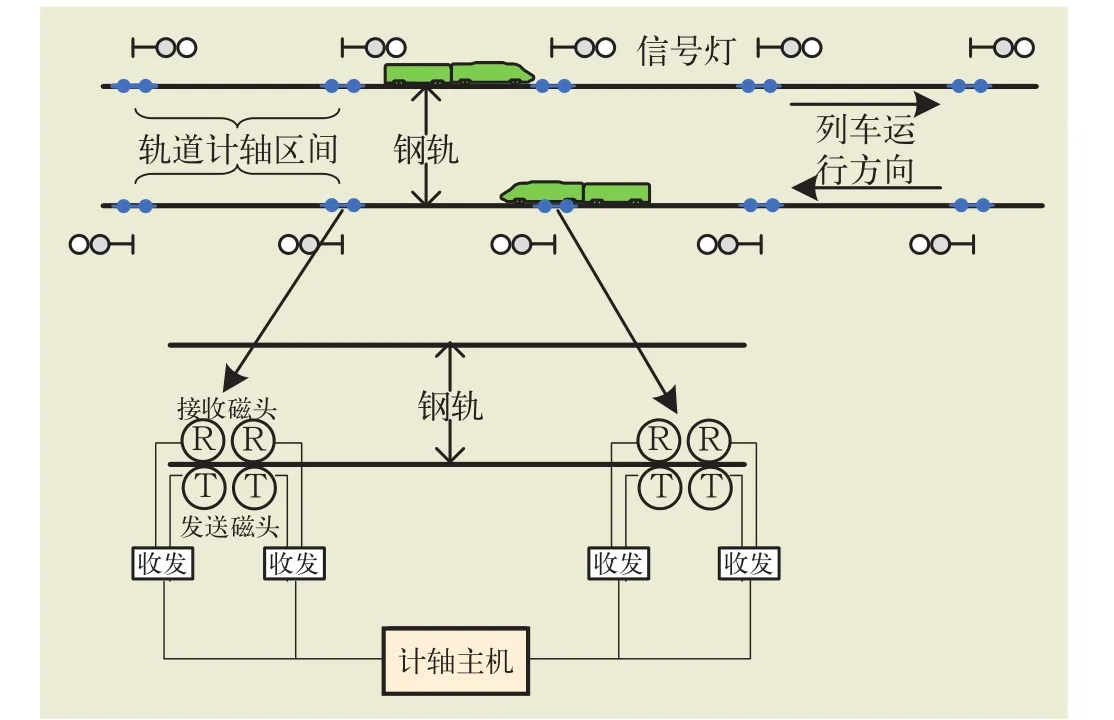
图4 计轴系统列车定位示意图
轨道电路定位与计轴系统定位相似,如图5所示。把轨道线路划分成若干轨道区段,通过判断列车占用某区段,确定列车在该区段范围内。具体工作原理为:将列车作为左右两根轨道的传导体,当某区间没有列车即空闲时,轨道电路的发射端电源通过钢轨与轨道电路的接收端形成闭合电路,使继电器励磁从而接通绿色显示电路。当列车进入该区间时,列车作为传导体使轨道电路端部电流减弱,使继电器消磁从而接通红色显示电路,表示该区段被列车占用。地面系统根据轨道区段占用信息判断列车位置。

图5 轨道电路列车定位示意图
1.3.2 适用性
计轴系统定位不具备连续性;仅能判断列车在某大区间范围内,定位精度很低,且区间设置越长,精确度越低。多辆列车在同一固定区间内,无法准确判断区间内列车的具体位置和同一区间内相邻列车的距离;同理,相邻区间内两列相邻的列车无法判断相互之间的距离。由于城轨试验线上列车运行没有规定的运行图,列车运行速度及占用轨道的位置较随意,计轴系统定位无法满足灵活、精确的列车定位需求。鉴于城轨试验线已经具有计轴系统,不需要再投资建设,可将其作为城轨试验线列车定位的备用方式。
轨道电路与计轴系统功能和性能等效,没必要再花费资金在城轨试验线建设一套轨道电路系统。因此,轨道电路定位方式不适用于城轨试验线。
1.4 无线网络定位方式
1.4.1 基本原理
无线网络定位主要通过无线基站或传感器与用户设备之间利用无线电波通信计算出用户设备位置,通常采用的方法有:基站标识定位法、基站场强定位法、到达时间法(TOA,Time of Arrival)、到达时间差法(TDOA,Time Difference of Arrival)、到达角度法(AOAAngle of Arrival),以及几种方法的混合方式。其中,TOA、TDOA、AOA是目前相对较为成熟的方法。
(1)基站小区标识定位法
移动台根据基站覆盖强度与最强信号基站(或无线节点)通信,从而判断移动台在该基站小区范围内。基站小区标识定位法只能判断移动台在某基站小区范围之内,定位精度取决于小区服务区域大小,通常定位精度很低。
(2)基站场强定位法
已知信道衰落模型及发射信号的功率值,通过测出基站接收信号的功率值,估算出收发信号机之间的距离,从而估计出目标移动台的位置区域。由于天线的抖动、无线信道的不确定性等因素都会造成信道衰落模型的大小尺度变化,从而使定位不准确。
(3)到达时间法(TOA)
这种方法利用在3座基站(或无线节点)覆盖范围内的移动台与3座基站之间通信的时间信息估计出移动台位置。如图6所示,移动台的二维位置坐标可由3个圆弧的交点确定。计算移动台位置(X,Y)的TOA方程组如式(1):

其中,(Xi,Yi)表示基站(或无线节点)所在的位置,c表示光速,t表示移动台发送信号的时间点,ti为移动台的第一个路径信号到达基站i(或无线节点)的时间点,i表示基站(或无线节点)的编号。由于无线信道的多变,基站(或无线节点)覆盖相交处常常为一个区域,而非一点。另外,TOA定位要求移动台和基站的时间精确同步,这样就增加了算法的复杂度。所以TOA技术很少被应用到实际中。
(4)到达时间差法(TDOA)
TDOA定位技术是在TOA技术基础上通过改进算法而不再要求时间同步的技术。TDOA定位中,移动台对一系列的基站(或无线节点)进行监听,并测量出每一对信号到达时间的差。然后由3个及以上基站(或无线节点)得到2个或多个独立的时间差测量值及基站(或无线节点)位置、无线信道信息计算出移动台位置,如图7所示。类同TOA公式(1),可得到TDOA的方程组如式(2):
同TOA相比,TDOA利用时间差从而降低了时间同步要求,所以TDOA更具实际应用意义。

图6 到达时间法
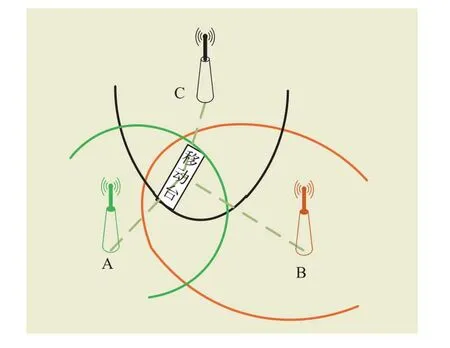
图7 到达时间差法

图8 到达角法

(5)到达角度法(AOA)
利用基站(或无线节点)的阵列天线判断出基站与移动台的方向角度,并绘制基站与移动台的连线,两座基站与移动台形成的2条连线的交点即为待定位移动台的位置,如图8所示。使用AOA技术时,移动台的位置没有二义性,但是此技术需要基站配备有方向性强的检测天线阵列。
在现实应用中,通常将AOA与TOA、TDOA联合起来使用,从而达到更高的定位精度的效果。但无线网络定位对无线信道的稳定性要求较高。
1.4.2 适用性
城轨试验线既有WLAN和正在建设的LTE-M无线通信系统均没有定位功能,如果要利用无线网络定位方式则需对既有系统进行改造或新建具备定位功能的无线通信系统,并配置车载设备。由于试验线呈闭合环状线性,隧道内无法实现利用3个及以上基站协同定位;如果全线采用非三角定位法则需沿线大量建设无线基站,且会由于无线覆盖的不稳定性造成位置信息串扰的现象;如果仅隧道外线路采用三角定位法,则需配置方向性很强的检测天线和计算能力很强的基站。另外,无线网络定位对无线信道模型依赖性较强,鉴于城轨试验线无线环境开放,易受外界电磁干扰而造成无线信道变化多端,从而使定位信息不稳定。为保障定位的准确性及列车行车安全,环状线性、无线环境开放的城轨试验线不宜采用无线网络定位方式实现列车定位。
1.5 卫星系统定位方式
1.5.1 基本原理
卫星定位方式基本原理与无线网络定位相似,如图9所示,只是将无线基站设置在太空中,从而使地球上任意一点可利用卫星接收机接收到3颗及以上卫星定位信息的接收机,通过三角公式TOA计算得到接收机在地球上的位置。
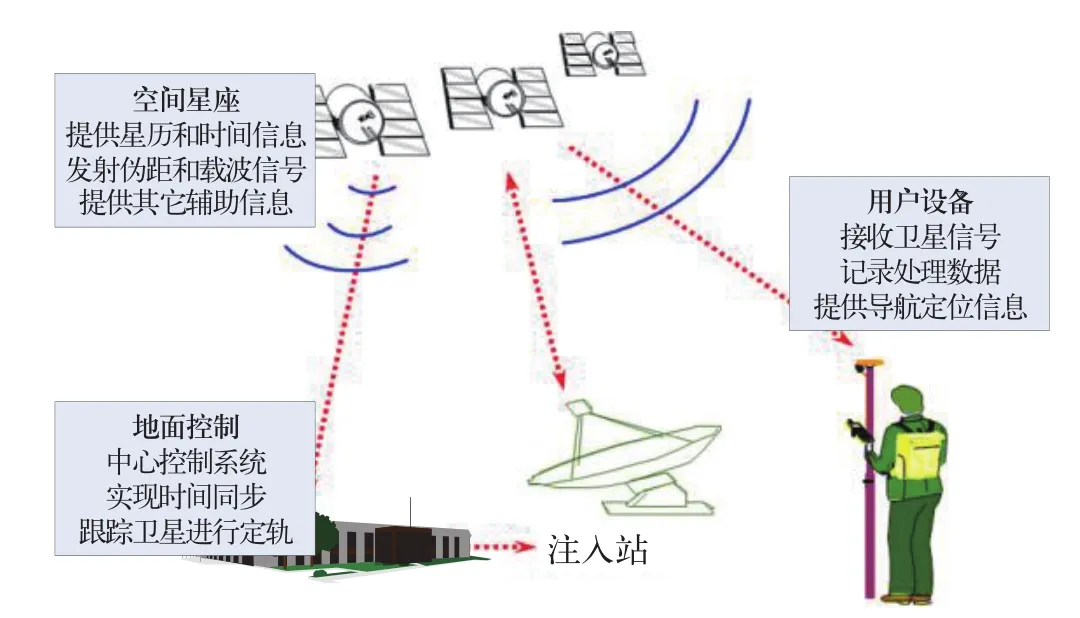
图9 卫星定位系统结构
1.5.2 适用性
卫星定位同样易受电磁波和气候等因素影响而存在定位精确度偏低、定位信息在一定精确度内漂移的现象,且卫星无法直接覆盖城轨试验线隧道,满足不了城轨试验线全线范围内列车定位的要求。因此既有卫星定位方式不适用于城轨试验线列车位置实时监测。
2 城轨试验线列车位置监测技术方案研究
通过分析可知,上述几种典型的定位方式均不能满足城轨试验线定位需求。鉴于此,本文提出利用分布式光纤振动定位方式和增强卫星定位方式实现城轨试验线列车位置监测方案,并通过结果分析验证其适用性,作为城轨试验线定位的技术依据。
2.1 分布式光纤振动定位方式
2.1.1 基本原理
分布式光纤振动定位系统基于相位敏感光时域反射仪(Φ-OTDR)技术,主要利用的是光纤中的瑞利散射效应。该定位方式利用窄线宽激光器作为光源;激光经过调制器后形成脉冲光并注入到振动传感光纤中,并在光纤中传播;当光纤某位置处受到来自车轮产生的振动时,该位置处的光纤长弯度、折射率会发生变化,从而引起此处的后向瑞利散射光信号产生变化;由于光在光纤中发生瑞利散射,其中沿光传播的反方向传播的后向瑞利散射光,在脉冲宽度内后向散射光会发生干涉作用;光探测器通过探测该瑞利散射光干涉信号的变化,获得传感光纤链路上的振动信息,从而获得列车轮轨的振动情况;探测器通过记录脉冲光注入光纤的时间,并根据光在光纤中传播的有效速度和接收到光纤中散射回来的的散射光的时间,准确描绘出扰动曲线;将扰动时刻的曲线与前一时刻的曲线进行作差处理,即可实现对振动位置的准确定位,从而准确监测列车的位置。系统的定位精度由发射的光脉冲宽度和信号的采样间隔决定,系统原理如图10所示。
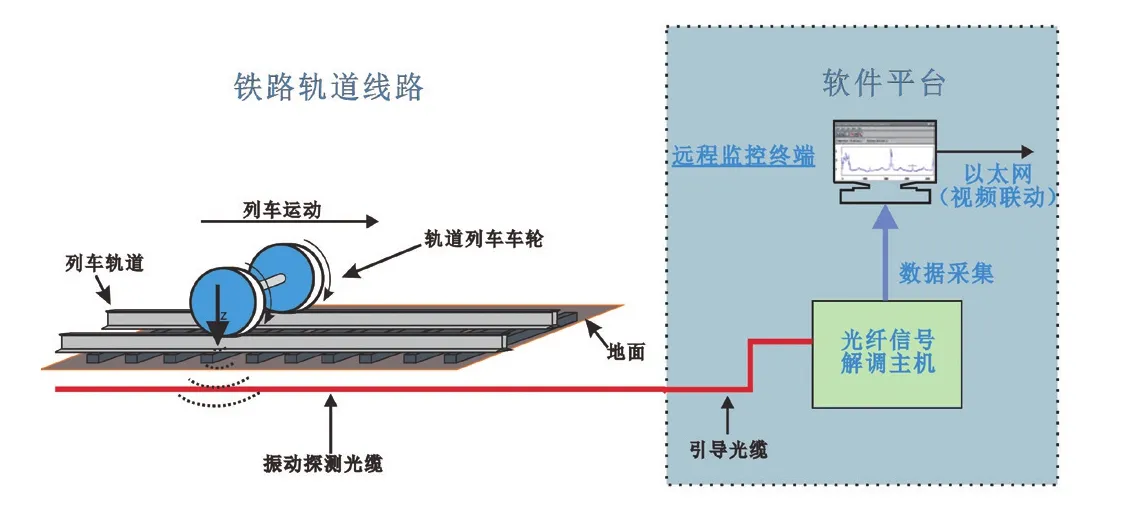
图10 分布式光纤振动定位检测系统示意图
分布式光纤振动定位系统的优势在于无需在轨道上布设任何传感装置和供电,直接利用轨道旁槽道内通信光缆搭建系统即可完成对列车振动信号的在线采集,通过对所采集的振动信号进行实时智能化处理,获得列车沿轨道运行的位置、方向、速度、车长等综合信息。
2.1.2 试验及适用性分析研究
图11和图12为某双线铁路利用两轨道中间光缆搭建分布式光纤振动定位系统的试验结果。图11为不同长度列车的振动信号的结果比对,图12为单辆运行轨迹、两辆列车同向和反向运行轨迹比对。
由图11和图12可知,分布式光纤振动定位方式具有可判断列车长度、定位精度较高、位置与时间信息明确、可准确判断列车运行方向等优点。但对于相邻并行线路同时同向运行列车时会存在相互干扰而无法分辨两列列车的缺陷。

图11 分布式光纤振动定位系统采集到不同长度的列车振动信息
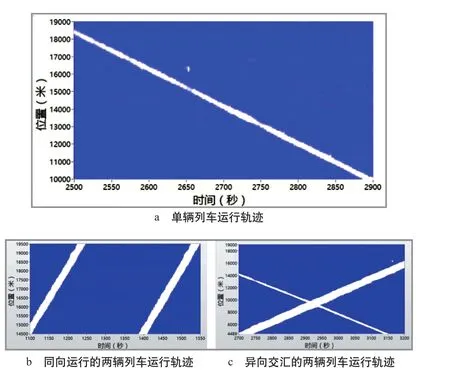
图12 分布式光纤振动定位系统检测到轨道上列车运行轨迹
城轨试验线沿线全部铺设了光缆,利用城轨试验线光缆安装分布式光纤振动定位系统,试验结果如图13所示。由图13可知利用分布式光纤振动定位系统能够获得较清晰的列车运行轨迹,即城轨试验线具备利用分布式光纤振动定位系统监视列车运行的条件。

图13 城轨试验线列车位置信号分布图及列车经过某位置时的时域信号
城轨试验线除隧道和高架桥外,均与铁路试验线存在并行相邻,最近距离仅5.5 m左右,相邻试验线路同时开展试验时,分布式光纤振动定位系统会存在干扰而不适用。但当铁路试验线与城轨试验线列车相对行驶,且相邻铁路试验线列车同时试验的数量较少时,分布式光纤振动系统可根据列车行驶方向区分出城轨试验线列车位置。同时,除相邻线路干扰外,分布式光纤振动定位方式只能检测出运行中列车的位置,判断静止中的列车的位置需信息系统时时记录列车位置并根据以往位置信息判断静止列车所在位置。
因此,分布式光纤振动定位方式仅不适于城轨试验线和相邻铁路试验线同时开展列车同向行驶试验时,以及相邻铁路试验线具有较多列车同时试验时的城轨试验线列车位置监测,其它场景下较合适。
2.2 增强卫星定位方式
通过分析卫星基准站技术和卫星全域覆盖增强技术,验证在传统卫星定位方式的基础上加载上述两种技术构成的增强卫星定位方式的适用性。
2.2.1 卫星基准站技术
为增强移动装置卫星定位的准确度,可在地面增设卫星基准站系统。其工作原理是把基准站中一套卫星定位接收机安装在已确定精确位置的点上;基准台接收机时接收卫星定位信号,并利用自身已知位置与卫星定位信息对比计算出误差值,然后将误差信息时时广播出去。基准站覆盖范围内的移动台接收到卫星定位信息和基准站的误差信息后,通过校准,提高定位精确度。环行铁道已在控制中心处部署一套基准站,如图14所示,可以覆盖到除城轨试验线隧道外的其它铁路试验线和城轨试验线。利用基准站定位精度可精确到水平误差0.4 m左右,垂直误差0.5 m左右,如图15所示。基于基准站的卫星定位精确度高,可以明显区分相邻并行试验线路列车位置。

图14 环行铁道卫星基准站精确定位系统框架

图15 基于基准站的定位监测
2.2.2 卫星全域覆盖增强技术
实现隧道内卫星定位,可以利用卫星全域覆盖增强技术,即在城轨试验线隧道外建设一套卫星和差分站接收基站、在隧道内增加无线信号覆盖单元,并利用光纤贯通连接。隧道内的卫星增强系统定位利用卫星信息和无线网络定位原理实现,系统结构如图16所示[13-14]。卫星全域覆盖增强技术已通过京沈客运专线试验验证,高速条件下隧道内定位精度约30 m,定位精度可满足城轨试验线仅约900 m的隧道内定位要求。
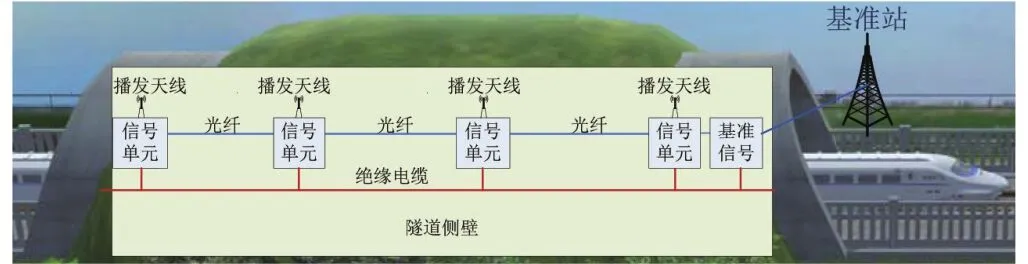
图16 卫星全域覆盖增强系统
利用增强卫星定位系统定位还需要考虑车辆具备卫星定位接收装置。由于目前多数城轨列车都不具备卫星定位接收功能,采用卫星系统定位需在城轨试验线上试验的列车上安装卫星接收装置。为实现地面对列车位置的监测,需将列车上卫星接收装置接收到的定位信息通过无线通信系统实时发送到地面。目前城轨列车均配置了WLAN或LTE-M,且城轨试验线具备WLAN系统并正在建设LTE-M系统,可满足城轨列车将位置信息通过无线系统时时传输到地面系统。
因此,利用增强卫星定位系统实现城轨试验线列车位置监测具备可行性。
2.3 列车位置监测方案
综上分析,鉴于当前铁路试验线试验同时试验的列车较少(同一时间段通常为一辆列车),故此优先推荐城轨试验线采用分布式光纤振动定位方式,相邻铁路试验线与城轨试验线采用相对运行模式的列车位置监测方案。试验列车较多的情况下考虑采用卫星系统定位方式实现列车位置监测的方案。同时考虑既有计轴系统作为其他方式的后备补充。
3 结束语
城轨试验线实现列车位置监测是拓展试验能力、保障试验安全的关键技术手段。本文结合既有定位方式特征、性能与城轨试验线的实际情况,全面对比分析了各种定位技术的优缺点和适用性,并提出了利用光纤振动定位方式和卫星定位方式解决城轨试验线列车位置监测需求,为城轨试验线扩能提供了参考方法和技术保障。