基于FLRDS的双路复用微位移传感系统设计
2019-09-19潘丽鹏林洪太宋志强崔丽琴
潘丽鹏,林洪太,邓 霄,b,宋志强,张 丽,崔丽琴
(太原理工大学 a.物理与光电工程学院,b.新型传感器与智能控制教育部与山西省重点实验室,太原 030024)
光纤环形腔衰荡光谱(fiber loop ring down spectroscopy,FLRDS)技术是AHERTON et al[1]提出的一种低成本、高灵敏的光谱测量方法,是在腔衰荡光谱(cavity ring down spectroscopy,CRDS)[2-5]技术的基础上发展而来的,它利用光纤环代替CRDS中的高反射率腔镜构成光学谐振腔。因此FLRDS技术不仅具有不受光源功率波动的影响的优点,而且使得检测系统的传感单元结构设计更加简单灵活,易于集成,对响应变量的测量变得简捷、精确。
FLRDS技术凭其对输入环路的光强稳定性要求不高的优点及光纤传感器本身抗电磁干扰、抗辐射、耐腐蚀等特性,被广泛应用于压强、温度、浓度等参数的测量[6-9]。WANG et al[10]将光纤布拉格光栅(FBG)作为温度传感部件接入光纤环,应用光纤环形腔衰荡光谱技术完成了对温度的测量,分辨率达到0.18 ℃;ZHU et al[11]提出了一种实时监测固有系统损耗的方法,提高了基于FLRDS的气体传感器精度,将乙炔浓度的检测平均误差降低为0.04%;2016年ALALI et al[12]基于FLRDS设计出一种可以测量相对湿度的光纤传感器,实现了在恒定温度下测量宽动态范围(4.0%~100%)的相对湿度;2006年LI et al[13]将PS-FLRDS应用于人体血清白蛋白的分析,在吸收峰面积与人体血清白蛋白浓度之间获得了极好的线性响应;2012年WANG et al[14]完成了对葡萄糖样品溶液中的浓度测试实验,实验结果显示当测试溶液质量分数范围为0.10%~10%时,检测灵敏度为0.10%.2017年WANG et al[15]提出了一种基于FLRDS技术和Mach-Zehnder干涉仪测量浓度和温度的新型传感系统,并通过不同的溶液浓度和温度来测试其特性,实验结果表明质量浓度灵敏度为0.001 4 g/mL,温度灵敏度为1.83 μs/℃.这些基于FLRDS技术的实验方案虽然取得了较好的效果,但是在光纤传感结构上只涉及到一个光纤环回路,故只能进行单通道、单参量的检测,无法满足大多数领域对同步多参数的测量需求,在应用方面受到了较大的限制。
针对以上问题,本文依据双光路的复用理论,在传感系统中采用延迟线方法,搭建了基于FLRDS技术的双路复用传感系统,进行了相应传感光纤固定点位移的检测实验,并对系统的重复性、稳定性以及灵敏度进行了研究。
1 复用测量原理
系统基于双路复用的理论,采用延迟线方法,以确保每个脉冲的返回值不会重叠混乱,双路复用结构如图1所示。如图2所示。
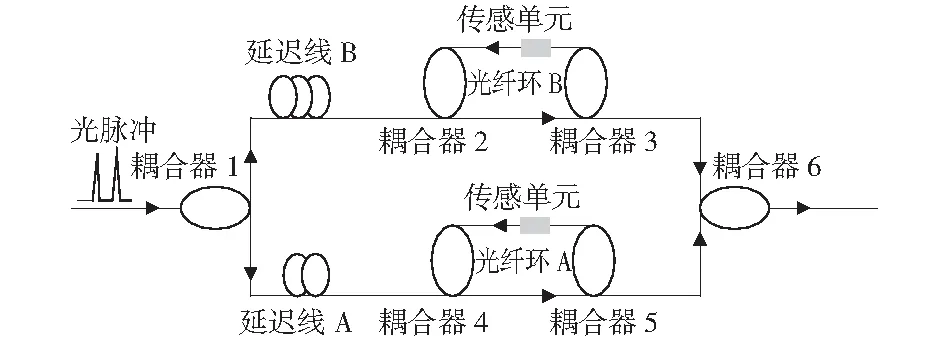
图1 双路结构示意图Fig.1 Dual multiplexed structure diagram


图2 双路脉冲序列图Fig.2 Dual multiplexed pulse sequence diagram
上式中lcA,lcB是光纤环A,B的长度,为l1;ldA,ldB是延迟线A,B的长度,分别是是l1,l2;tcA,tcB是光脉冲在A,B光纤环传输一圈所用的时间;tdA,tdB是光脉冲经过延迟线A,B所用的时间;n表示光纤的有效折射率。
系统中采用上述结构的延迟线余量相对宽裕,因而需对更一般的情况进行探究。假设所有环路的光纤环长均为l,第一环路的延迟线长度也为l,此后延迟线的长度是以一个首项为l,公差为d的等差数列在不断增加;m表示环路数量,wl表示脉冲宽度;t1,t2分别表示脉冲在第一个环路中循环输出的第一个脉冲和第二个脉冲的时刻;t21表示二者的差值,为一固定值,且所有环路的这一值均相等。在确保脉冲序列有序输入到光电探测器的前提下,可以得出如下式:
(1)
(2)
从式(1)、(2)可以看出,光纤环的数量m是由光纤环长度l、激光脉冲宽度wl及环路长度的公差d决定的。在l一定的情况下,随着wl和d越来越小,m的值会越来越大;但是考虑到环路分辨率、环路便携性以及传感器灵敏性,一般在确定l的情况下,需要选取合适的wl和d.
2 实验装置
双路复用微位移传感系统由激光器、两路并联的FLRDS传感回路、采集设备及位移传感单元组成,如图3所示。该系统采用窄线宽的DFB半导体激光器(THORLABS)作为光源,中心波长为1 550 nm,经调制后为系统提供脉冲激光,脉冲宽度为20 ns,输出的激光脉冲重复周期为20 μs.传感回路由两个耦合比为50∶50的耦合器(耦合器1、耦合器6)、两条延迟线(延迟线A、延迟线B)、两个光纤环回路(光纤环A、B均由两个耦合比为90∶10的耦合器和一截光纤组成)及光电探测器(DET08CFC/M)构成。光电探测器转换后的数据由示波器(MSOX3102T)采集。传感单元由千分尺和光纤固定点构成。
激光脉冲经过耦合器1后,被分成功率相等的两束脉冲光,作为进入双路复用系统的光源。由于路径中延迟线的差异,使得光电探测器接收到的两路光脉冲信号在时间上先后分开,相当于在两个环路之间加入一个合适的相位调制项,在延迟线A,B传播的光脉冲将分别进入到A,B两路光纤环中,A,B光纤环路都作为一个独立的衰荡腔系统,均运用于微位移的测量。当两路脉冲光分别进入A,B两路光纤环内时,光脉冲在光纤环内每循环绕行一次,会经过一次微位移传感器,进而输出对应的衰荡脉冲,在两个环路的输出端逆用一个耦合比为50∶50的耦合器6即可把两路传感器的脉冲序列整合后有序输出,经光电探测器进行光电转换后输入到示波器中显示,呈现出相位差明显的衰荡信号。
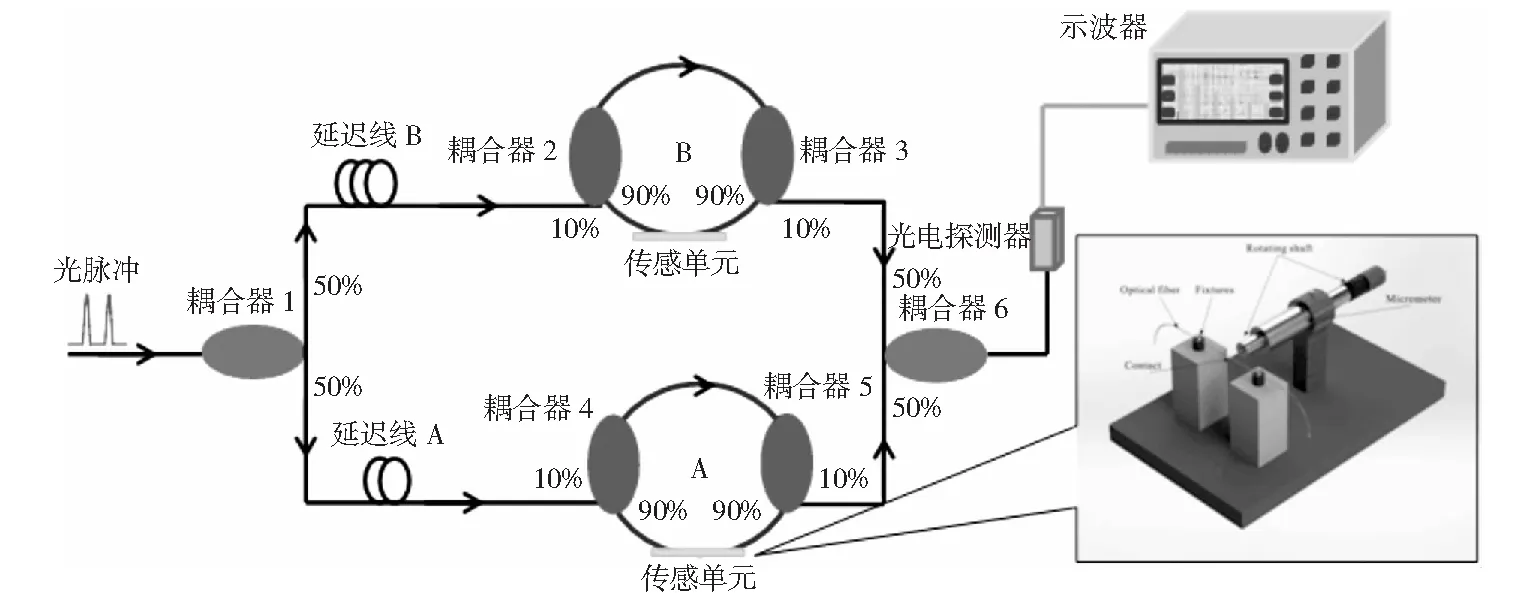
图3 双路复用微位移传感系统Fig.3 Dual multiplexed micro-displacement sensing system
当有位移作用于光纤传感器时,脉冲光会产生由位移变化引发的额外损耗,额外损耗会引起衰荡时间改变,如式3所示[8]:
(3)

3 实验结果与讨论
利用图3所示实验装置,对双路传感系统进行了实验研究。采集该传感系统输出的双路衰荡脉冲并对其进行了e指数的拟合,如图4所示。图4(a)表示双路传感系统输出的脉冲序列,图4(b)表示其输出衰荡脉冲峰值的拟合曲线。图4(a)中任意两个相邻的脉冲峰峰值时间间隔为140 ns,表明B通道的延迟线在相位上比A通道推后140 ns;转换为长度后即B通道的延迟线比A通道长28.61 m,即公式(2)中的公差d.另外从图中可以明显看出延迟余量相对充裕,具有多级并联的潜力。图4(b)中可以看出,A、B的峰值拟合曲线的拟合率为99.9%,相邻脉冲之间的时间间隔t为229 ns,可以计算出A通道和B通道的光纤环长度分别为46.91 m,46.75 m,两环长度近似相等。

图4 光脉冲在双路光纤环内的衰荡曲线Fig.4 Ringing curve of light pulse in a dual multiplexed fiber ring
为了验证传感器的重复性,在A、B双路传感系统中分别进行了10组实验。A路中的10组实验分别包含5组位移为0 mm和5组位移为6 mm的实验,每组实验被交替进行,实验数据以1 min的频率采集1次,每组采集10次,结果如图5(a)所示。图5(a)表明,当被测光纤固定点位于0 mm处时,衰荡参数为(0.950 081±0.001 150 6) μs-1,而当位于6 mm处时,衰荡参数为(0.955 884±0.001 966 4) μs-1.对B路传感器分别依次进行5组位移为0 mm和位移为5 mm的实验,实验数据以1 min的频率采集1次,每组采集10次,结果如图5(b)所示。图5(b)显示的是每隔一段时间在B路光纤环中的传感器上施加0 mm与5 mm的位移时衰荡参数的变化,在0 mm处的衰荡参数为(0.953 523±0.001 757) μs-1,而在5 mm处时为(0.959 957±0.002 013) μs-1.实验结果显示A、B两环路中传感器的重复性最大误差分别为0.001 966 4 μs-1,0.002 013 μs-1,表明传感器的重复性较好。

图5 重复性测试结果Fig.5 Repeatability test results
为确保传感器系统的可靠性,进行了验证实验。分别对A,B两路位移传感器施加0~10 mm的位移,对A路和B路传感器分别每间隔2 mm和1 mm进行采集,得到验证结果如图7及表1所示。可以看出,A路传感器的相对误差为2.1%,而B路传感器的相对误差为4.0%.
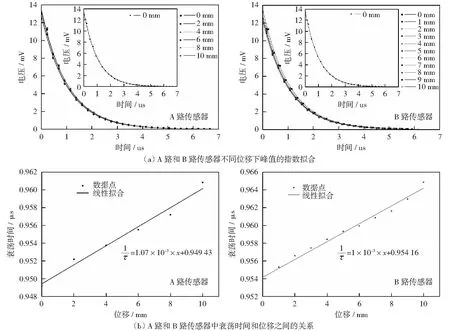
图6 标定实验结果Fig.6 Calibration experiment results
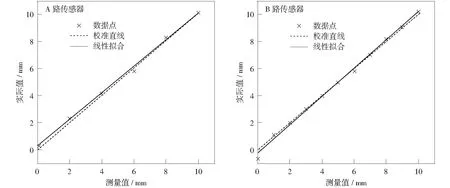
图7 传感器的验证结果Fig.7 Sensor verification result

Table 1 Comparative results of A and B channels mm
4 结论
本文依据双路复用的理论,引入延迟线方法,将传感单元引入光纤环谐振腔中,搭建出同步复用传感器系统,实现了对位移的双路同步测量。实验结果表明:在重复性测试时,A路传感器在0 mm和6 mm处的衰荡参数分别在0.950 080 6 μs-1和0.955 883 6 μs-1附近上下波动,波动范围分别是±0.001 150 6 μs-1和0.001 966 4 μs-1;B路传感器在0 mm和6 mm处的衰荡参数分别在0.953 523 μs-1和0.959 957 μs-1附近上下波动,波动范围分别是±0.001 757 μs-1和±0.002 013 μs-1.此外,A,B两路传感器的灵敏度分别为(1.07×10-3±7.337×10-5) μs-1·mm-1和(1.00×10-3±4.130 014×10-5) μs-1·mm-1.在验证实验中,A、B两路传感器的相对误差分别为2.1%,4.0%.从实验结果可以得出,该方法不仅可以用于双通道的位移检测,亦可用于压力的同步检测,或者双通道的不同参量同步检测;在对其中传感器适当改变的情况下可以完成对化学分析、大气环境检测、生物样品等关键参数的测量。当系统光功率得到满足的前提下,可在上述领域推广多通道多参量的分布式同步检测,使其具有更多的现实意义。