双频识别声呐提取沉水植物盖度的可行性初探
2019-09-17王茂枚实2
赵 钢,王茂枚,徐 毅,舒 实2,蔡 军
(1.江苏省水利科学研究院,南京 210017; 2.河海大学 土木与交通学院,南京 210024)
1 研究背景
沉水植物作为湖泊生态系统的初级生产者,在固定底泥、防止沉积物再悬浮、净化水质等方面具有重要的作用[1-3]。然而,湖泊沉水植物会随着富营养化进程,发生衰退甚至消失[3]。沉水植物的逐步消亡打破了原有的生态平衡,并由此引发了湖泊水质恶化、生态系统破坏等一系列生态环境问题,严重影响了水体功能的正常发挥和湖泊周边人民的身体健康[3]。因此,探测与调查湖泊沉水植物的分布及群落结构,在湖泊水生态环境修复工作中起着十分重要的作用。
现有湖泊沉水植物分布和群落结构的探测与调查方法主要包括:人工样方调查、卫星遥感监测以及回声探测仪调查。人工样方调查,主要是在选定的区域使用采泥器及水草采集刀具采集、捞割沉水植物[4],这种方法可以准确获得沉水植物的种类、盖度、鲜重等生长状况。但是如要了解整个区域的沉水植物情况,工作量过于繁重,对于观测或获取所需沉水植物难度较大的样地,调查得到的数据也很难全面地代表样地的实际情况,而且样方调查往往将沉水植物连根拔起,会对沉水植物造成破坏。卫星遥感监测方法是在获取特定时段卫星遥感影像数据的基础上,得到沉水植物分布图,然而,目前遥感影像数据的分辨率较低,如水体表面被蓝藻覆盖,会大大影像解析结果的准确性[5-6]。应用回声探测仪对湖泊沉水植物进行走航式调查,能够大幅提高野外调查效率,但是回声探测仪难以识别湖泊底泥的泥水界面及底泥表层的有机碎屑,反而增加了回声信号分析的难度和工作量[7-8]。由此可见,由于受到环境、人力、物力、时间等条件的制约,现有沉水植物的调查方法仍然存在一定的缺陷和不足,有必要探索更为高效、科学的调查方法。
近年来,声呐探测技术在水下鱼类探测[9]、水下工程检测[10-11]等相关领域得到广泛应用。张进[9]利用双频识别声呐对上海滴水湖中的鱼群进行了定量评估,成功获得鱼体个数和鱼长;陈星辰和陈斌[11]使用双频识别声呐对洪泽湖三河船闸的水下工程状况进行探测,准确获得其水下损坏程度和损坏位置。植物盖度是植物地上部分垂直投影面积占样方面积的百分比[4],双频识别声呐可通过发射波束经水体传播后到达沉水植物表面而产生回波并被声呐接收,实现在浑浊、黑暗的水下获得清晰的影像数据[10-11]。理论上采用双频识别声呐探测技术调查湖泊沉水植物盖度是可行的,但是目前实际应用尚未见报道。
本文利用双频识别声呐探测技术对太湖沉水植物开展探测,通过影像后处理获取沉水植物盖度,并对比传统样方调查方法分析双频识别声呐探测技术调查沉水植物数据的可行性,为湖泊沉水植物演替规律的研究和湖泊水生态环境修复工作提供技术支持和理论参考。
2 研究区域与方法
2.1 研究区域及调查时间
太湖贡湖湾位于太湖东部(如图1(a)),湖底平坦,水深2 m左右,分布着种类较多的沉水植物,主要优势种为马来眼子菜等;贡湖湾为无锡市、苏州市等周边地区重要的水源地;另外,近年来,贡湖湾沉水植物群落呈现明显减少趋势,需要加强探测和调查[12]。因此,选择太湖贡湖湾作为本文的研究区域。遵循GIS方法中的成层随机布点原则,兼顾采样点分布的均匀性和随机性,在贡湖湾湖区选择具有代表性的采样点10个,其中贡湖湾西北部5个,东部5个,如图1(b),各采样点坐标见表1。笔者分别于2013年5月、2013年8月、2013年11月及2014年2月,按不同季节分4次对太湖贡湖湾湖区沉水植物开展调查研究。

图1 太湖贡湖湾湖区位置及采样点分布Fig.1 Location of Gonghu Bay of Taihu Lake and distribution of sampling points
2.2 双频识别声呐探测方法
双频识别声呐(Dual-Frequency Identification Sonar,缩写DIDSON):通过声学透镜对波束进行压缩,聚焦形成非常狭窄的波束来生成接近光学照片画质的高清图像数据[11]。双频识别声呐工作时所使用的主要设备包括:
(1)双频识别声呐(标准型)。可在1~40 m范围内对观测目标进行自动调焦,保证了观测范围内图像清晰度。
(2)船只。为了实现双频识别声呐在湖泊中运行,需要船只作为运载工具。
(3)GPS定位系统(Leica RTK GPS)。利用GPS定位系统对船只进行导航,并将探测结果与已知坐标进行比对校正,对测线进行平面精度控制。本文采用高精度的Leica RTK GPS。
(4)计算机。计算机或笔记本电脑接收双频识别声呐获得的影像数据并进行后处理分析。
双频识别声呐探测主要包括以下3个步骤:
(1)基于各探测点形成测线,使得测线能够经过全部测点。利用测绘局提供的CORS系统进行测线平面控制,控制测线的相对探测点的平面偏差在1.5 cm之内。
(2)以船只作为运载工具,将双频识别声呐和GPS定位系统一同固定于船只船舷处同一位置,使双频识别声呐的探头设置于湖泊水面以下并与水平面呈25°~35°范围内的锐角,探头与探测目标的距离设定在1~2 m内。
(3)利用GPS定位系统导航船只,使双频识别声呐按照既定的测线移动。船只带动双频识别声呐的平移速度不超过3 m/s。为了获得沉水植物的高分辨率影像,设置双频识别声呐最优工作参数,即采集窗口起点距离0.83 m、窗口长度2.5 m。
2.3 图像数据后处理方法
为了实现对声呐图像的盖度提取,本文提出了基于数字影像处理技术的双频识别声呐数字图像处理系统。首先,将图像转换为目前常见格式的影像,如JPG,BMP,PNG等,其图像编码格式统一,在后续的处理中易于进行像素级操作,如图2(a)所示;其次,变换图像灰度,为了突出显示出植被的细节部分且提高其显示清晰度,将水域部分变换为黑色背景,植被增强为白色显示;最后,利用行列扫描算法,扫描各个像素的灰度值,并根据植被像素所占总图像面积的比值估算单位面积水下的植被的盖度,如图2(b)所示。
2.4 人工样方调查方法
在进行双频识别声呐探测的同时,作为对照,在每个调查区域通过人工样方调查对沉水植物进行种类识别和盖度比对。人工样方调查采用多次重复随机小样方调查的方法[13],每个样方为0.5 m×0.5 m的铁框,采样时将框内全部沉水植物连根拔起,每个样点取5个样方,记录样方种类和数量,并称取鲜重。最后,通过方网格法计算盖度。
3 结 果
3.1 双频识别声呐影像显示结果

图3 4种典型沉水植物声呐影像Fig.3 Sonar images of four typical submersed macrophytes
将双频识别声呐探测得到的太湖贡湖湾典型沉水植物影像与样方取得的样品进行实际对照,分别得到马来眼子菜(Potamogetonmalaianus)、微齿眼子菜(Potamogetonmacckianus)、穗状狐尾藻(Myriophyllumspicatum)和金鱼藻(Ceratophyllumdemersum)4种典型沉水植物的声呐影像,如图3所示。
从图3可以看出,4种典型沉水植物分别呈现如下特点。
马来眼子菜:叶条形,叶片先端钝圆而具小凸尖,基部钝圆,边缘浅波状,有细微的锯齿。
微齿眼子菜:茎细长,具分枝,近基部常匍匐,于节处生出多数纤长的须根,叶条形,无柄,先端钝圆,基部与托叶贴生成短的叶鞘,叶缘具微细的疏锯齿。
穗状狐尾藻:根状茎发达,在水底泥中蔓延,节部生根,茎圆柱形,分枝极多。
金鱼藻:茎平滑,具分枝,叶裂片丝状条形,边缘仅一侧有数细齿。
3.2 盖度的提取与分析
将不同时间各样点声呐探测数据文件按帧号提取出多幅图片,从中去掉场景重叠部分的图片,得到场景独立的各组图片。然后通过双频识别声呐数字图像处理系统进行批处理,得到各采样点的盖度,并与采样点区域的多次重复随机小样方调查结果进行对比,结果如图4所示。
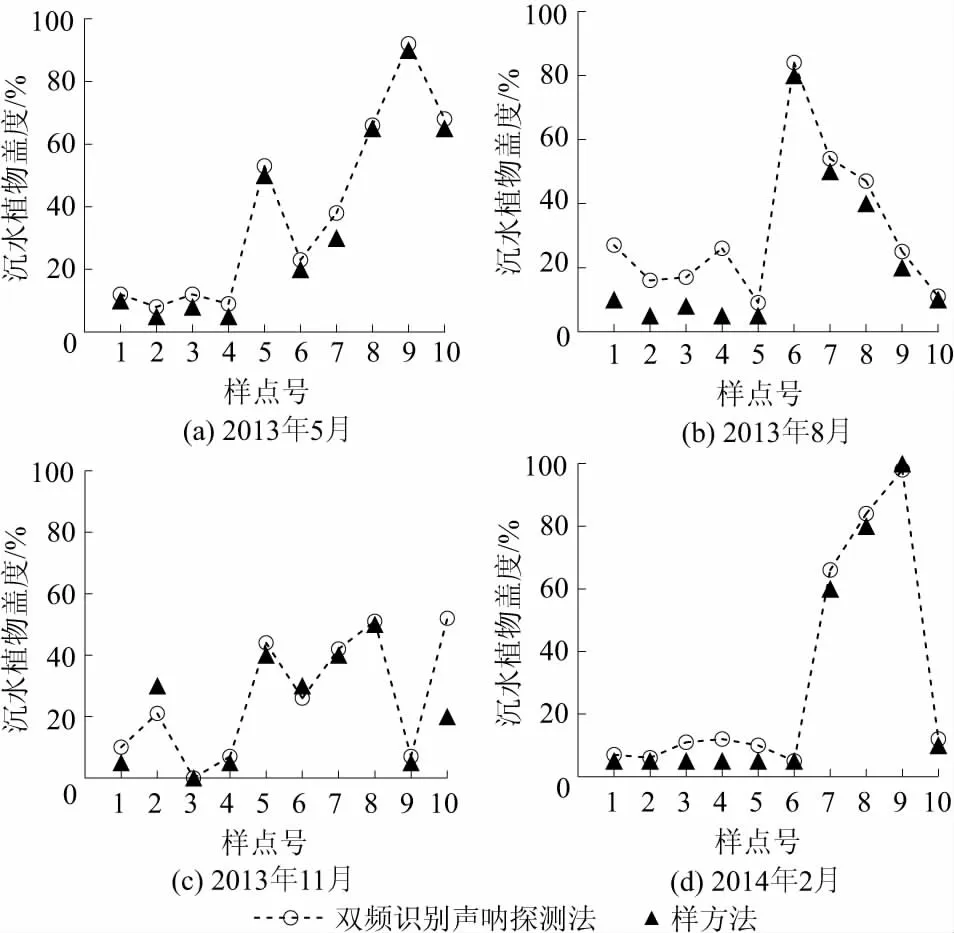
图4 不同季节各样点声呐探测法与样方法盖度对比Fig.4 Comparisons of acquired coverage at sampling points between DIDSON and plot method in different seasons
图4(a)为2013年5月分别用声呐探测法和样方法测得的沉水植物盖度,在1—10号样点处声呐探测法得到的沉水植物盖度分别为12%,8%,12%,9%,53%,23%,38%,66%,92%,68%,而样方法测得的盖度则分别为10%,5%,8%,5%,50%,20%,30%,65%,90%,65%,2种方法得到的盖度基本一致,声呐探测法测得的盖度略高于样方法。2013年8月测得的结果也基本类似,多数样点处声呐探测法测得的盖度高于样方法(图4(b));而在图4(c)中,2013年11月声呐探测法测得的盖度在2号和6号样点处略低于样方法结果,但2种方法得到的盖度相差不大。图4(d)显示2种方法得到的盖度呈现类似的规律,2014年2月1—6号样点处的沉水植物盖度在5%~10%之间,而7—9号样点处的盖度>60%,在9号样点处甚至接近100%。通过与传统的样方法进行对比,可以发现本文提出的双频识别声呐法测定的沉水植物盖度与样方法基本一致,表明该方法探测得到的沉水植物盖度与实际值较为接近,对于大面积的沉水植物调查来说,该方法探测数据具有较高的参考性。
4 讨 论
沉水植物的盖度可以科学反映湖泊水体的生态状况,所以湖泊的沉水植物调查是一个重点。与其他生物群落的调查方法一样,沉水植物的调查也属于统计生态学的范畴,其分析方法是从一组观测数据出发,经过分析、运算,找出数据中隐藏的规律。受人力、物力和时间的限制,在大多数情况下,研究者都不可能对所研究地区(或范围)的生物群落进行全部的研究,而只能抽取其中的一部分来研究分析。传统的植物群落调查主要采用样方法。但是,由于沉水植物广泛具有集群分布的特征,反映群落种类组成的最小面积在不同的群落地段可能有极大的不同,随着样方面积的增大,种类-面积曲线有较大的差别;同时,人工捞割沉水植物,不仅工作量繁重,且有些样地很难观测、收取到所需的沉水植物,调查得到的数据不能全面地代表样地的实际情况,还会对沉水植物造成破坏。所以,沉水植物的调查一直是一个难点[4-5]。
受双频识别声呐应用到渔业资源调查中的启发,为了探索出一种更为高效可靠的湖泊沉水植物调查技术,本文根据双频识别声呐的工作原理,考虑探测目标沉水植物的生理轮廓、生态分布特点,结合探测区域水体环境特点,提出利用双频识别声呐调查湖泊沉水植物的方法。双频识别声呐通过声学原理成像,弥补了光学成像系统受环境光源亮度、水体透明度及环境对比度限制的缺陷,适用于在水体透明度不高的太湖中探测调查沉水植物;双频识别声呐分辨率较高,采用双频识别声呐能够探测并分辨沉水植物的茎干和叶片目标,植物形态与生长型等因素对探测结果并无明显影响,能够较好地反映实际情况。
较传统采集调查方法,其优势主要表现在4个方面:
(1)分辨率高,可直观、形象地观测到沉水植物的形态,且不伤害沉水植物,对湖泊生态影响小。
(2)获取的沉水植物图谱影像是连续的,且全覆盖不漏测。
(3)观测的数据和图像可以有效地收集保存,为日后的观测和研究提供方便,且可以同时观测湖泊地质、地貌等其他状况,可与其他领域交叉使用。
(4)易操作使用,携带方便,大大减小工作人员的工作量和工作强度。
然而,将双频识别声呐获取的盖度与传统的样方法结果进行对比,可以发现2种方法获得的盖度指标仍然存在一定的差异,双频识别声呐获得的盖度指标往往高于样方法。在图4(b)中,2013年8月1—4号样点的盖度指标,双频识别声呐结果甚至是样方法结果的2~4倍。当时正值夏季,是蓝藻生长最为旺盛的季节,水体中悬浮大量的蓝藻等杂质,对双频识别声呐的探测造成了一定的影响。因此,双频识别声呐探测沉水植物时,往往会受到水体中其他物种或杂质的影响。
另外,由于双频识别声呐在探测沉水植物时,探头与探测目标的距离需设定在1~2 m内,对于水深较深的湖泊,还需对探测装置进行改装。而根据本文的探测试验,为了获得清晰的沉水植物影像,船只带动双频识别声呐的平移速度不宜超过3 m/s,因此,探测速度也不宜过快。
5 结 论
本文利用双频识别声呐在不同季节对太湖贡湖湾沉水植物开展探测调查,主要得到以下2点结论:
(1)双频识别声呐能够在水体透明度不高的湖泊中以及不破坏沉水植物的情况下,探测并分辨植物的茎干、叶片目标,采用该方法调查沉水植物盖度是可行的。
(2)基于数字影像处理技术提出了双频识别声呐数字图像处理系统,可以实现沉水植物盖度的提取。通过与样方法调查结果对比发现,双频识别声呐探测得到的盖度与实际值较为接近,对于大面积的沉水植物调查来说,该方法探测数据具有较高的参考性。研究成果可为湖泊沉水植物演替规律的研究和湖泊水生态环境修复工作提供技术支持和参考。
