光纤安防系统中振动信号的特征提取和识别
2019-09-16邹柏贤许少武逯燕玲
邹柏贤 许少武 苗 军 逯燕玲
1(北京联合大学应用文理学院 北京 100191)2(北京信息科技大学计算机学院 北京 100101)3(网络文化与数字传播北京市重点实验室(北京信息科技大学) 北京 100101)
安防监测系统的关键部分在于光纤振动传感器和信号识别模块.当地面受到外力挤压时,埋在地下的光纤振动传感器会因振动而产生不同的光强波动信号;当光纤振动传感器受到外力直接触及时,也会产生不同的光强波动信号[1].如果在军事基地、机场、石油和天然气场站等需要重点保护区域的周界地下铺设光缆及光纤传感器,当这些区域遭到来自外界的入侵时,传感器能探测感知到外界产生的振动.安防系统对探测到的光强波动信号进行处理和分析,并在获取不同入侵行为的信号特征后,运用有效的识别技术,可以实现对系统监测区域的实时监测和入侵预警,从而提高对这些重点区域的安全保障能力.光纤安防监测系统具有监测范围大、识别能力强、反应快等特点,且能实现高精度定位,其实际应用日益增多.
1 光纤安防系统原理
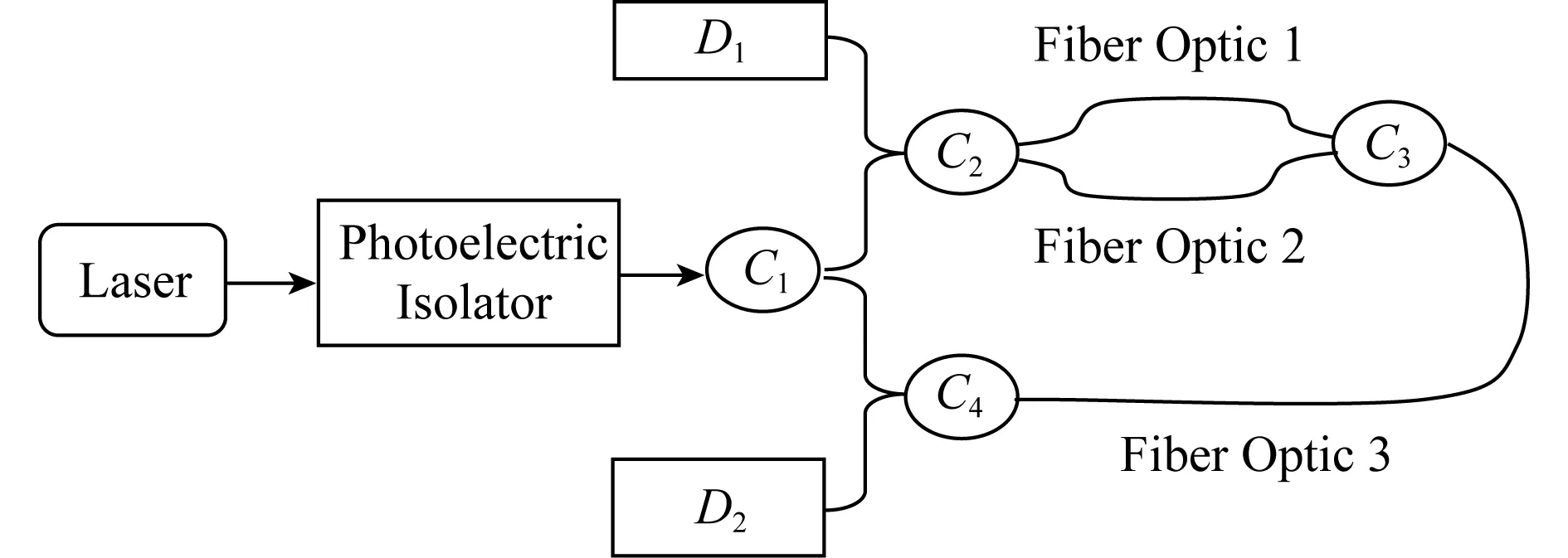
Fig. 1 Model of optical fiber security monitoring system图1 光纤安防监测系统结构图
光纤安防系统由马赫-泽德干涉仪光纤传感器、激光器、光电隔离器、光纤、耦合器、探测器组成,如图1所示[2-3].在光纤安防系统示意图中,光信号产生于激光器,经隔离器分离出上、下2束相干光.上、下2束光信号分别沿着顺时针、逆时针方向传播,探测器光纤将受到外界信号调制的光波传输到光探测器进行检测,将外界入侵信号从光波中提取出来并按需要进行数据处理.
由于外界导致光纤振动的监测信号具有很强的不确定性,在统计上呈现为随机性、非平稳性和间歇性,这直接导致入侵事件类型的识别难度加大.随着光纤安防监测应用的日益增多,分析研究光纤安防监测信号的特点、改进外界入侵事件类型的识别方法,具有十分重要的意义.
时频分析(time frequency analysis)是光纤振动监测信号处理的常用方法.若光纤振动信号为S(t),与其对应的解析信号为Z(t),则其时频分布(time frequency distribution, TFD)可以表示为[4-5]:
(1)
其中,KZ(t,τ)=Z(t+τ2)·Z(t-τ2)是瞬时自相关积,是S(t)的希尔伯特变换,F是傅里叶变换,表示时间卷积(time convolution),G(t,τ)是时滞核(time-lag kernel),即

这里α是一个正实数,也称作正规化因子.
传感光纤是光纤安防监测系统的重要组成部分,通常埋设在所保护区域周围且在地面之下,这样具有一定的隐蔽性.由于传感光纤具有灵敏特性,它对各种触碰或未直接触碰传导而至的外力入侵行为产生振动,进而引起光纤内部光信号传输产生扰动.在复杂的现实环境中,各种人为或非人为的自然干扰因素很多,这使得安防监测系统正确识别入侵事件是一个挑战,要解决这个问题,应当从提取信号特征和识别方法着手.分析光纤安防系统监测信号的时频特征是一种重要方法[6].
2 光纤信号的特征提取与识别研究现状
近年来,光纤安防监测信号的特征提取和识别方法取得许多研究成果.光纤振动信号的特征提取方法主要有采用小波分解、采用其他分解模型以及采用信号波形统计参数的直观特征提取方法.对光纤入侵事件的识别方法主要有神经网络识别方法、经验阈值识别方法、支持向量机识别方法.
2.1 采用小波分解的特征提取及识别方法
在各种光纤振动信号的特征提取方法中,小波分解法是最为常用的一类方法,主要包括小波或小波包分解、小波降噪等.小波包比小波更为精细,小波包的每一级能同时分解低频和高频分量,提高了时频分辨率,提取的特征信息更丰富,有助于增强监测系统的识别能力,但它对系统存储和计算资源提出了更高要求.小波分解法应用场合比较广泛,尤其适合于信号中短时间内突发异常的情形.
饶云江等人[7]采取多尺度边缘检测方法进行信号分割和2层小波分解等处理,提取信号的峰值、长度、幅度、周期等参数特征,根据提取的信号特征用经验阈值法识别研究了4种报警行为:人工行走、奔跑、汽车行驶、物体跳跃振动.在对振动信号进行噪声预处理和小波包分解之后,Jiang等人[8]提取系统监测信号的3阶小波包能量特征,用反向传播(back propagation, BP)神经网络识别针对机场的3种入侵行为,即人工行走、汽车行驶、小动物爬行.赵杰等人[9]则对光纤振动信号进行5层小波包分解,得到32个子频带的小波包系数,在小波重构之后提取各频带内的信号分量,计算能量谱的特征向量,采用BVC-RBF神经网络(radial basis function neural network with boundary value constraints)算法识别振动信号类型.罗光明等人[10]利用小波对振动信号各频带进行时域分析并计算各频带信号的能量,用小波各尺度上的能量构造了特征向量.由于不同入侵事件引起的振动信号及其变化会反映到各频带的能量上,这使得不同入侵事件的特征向量也不相同,最后采用经验阈值法识别入侵事件.万遂人等人[11]同样进行5层小波包分解,提取32维能量谱特征,再利用支持向量机分类器对光纤信号进行分类.杨正理[12]利用2层小波分解光纤振动信号,提取2层小波系数,通过经验阈值法判断男子攀爬及弱扰动信号事件(风雨、来往车辆震动、飞鸟起降).喻骁芒等人[13]提取3层小波包分解频带能量特征,首先用阈值法判断入侵事件和环境噪声,当检测到发生入侵事件时,用BP神经网络方法识别行人、小汽车、小动物越境这3种入侵事件.杨正理等人[14]对降噪后的振动信号进行4层小波分解,求出振动信号的小波能量熵分布特征,然后根据不同入侵事件产生的信号扰动能量熵阈值范围在不同小波尺度上的分布特点识别入侵事件.朱程辉等人[2]首先用阈值法判断是否发生入侵事件,在发生入侵事件的情况下,对光纤振动信号进行小波变换,由能量谱和持续时间构成特征向量,再用支持向量机分类算法识别入侵事件.李凯彦等人[15]利用希尔伯特变换、最大能量、最高信噪比挑选出振动信号的特征段,用特征段持续时间和小波包能量谱构成复合特征向量.在入侵事件类型识别阶段采用二叉树支持向量机方法识别入侵事件.朱程辉等人[16]根据监测信号的小波变换系数计算短时能量分布特征,结合短时平均过零率特征,用对比法判断是否发生入侵事件,再以小波各尺度上的能量分布特征与经验值进行比较后识别入侵事件类型.
2.2 采用其他分解模型的特征提取及识别方法
这类特征提取方法包括7种:1)根据监测信号的标准差、均值和方差等建立回归方程的方法;2)根据监测信号参数进行动态规划的频率-时间特征提取法;3)对监测信号进行本征模态模型分解法;4)采用高阶谱分析的谱分析法;5)基音特征分析法;6)傅里叶分解法;7)提取门限过零率和稀疏编码的特征提取法.
在回归方程特征提取方法中,采用校验和多元回归方法选择最显著的脉冲、方差和时间这3个参量作为特征向量,然后用阈值法识别信号类型[17].在频率-时间特征提取方法中,提取光纤振动信号的短时过零率特性,分段后建立相应的特征参数模型,通过动态规划算法求出最优特征参数作为信号的特征向量,采用人工神经网络方法识别入侵事件类型[18].蒋立辉等人[19]提出本征模态分解特征提取法,对混入白噪声的光纤振动信号进行经验模态分解,提取本征模态函数特征分量,利用支持向量机(support vector machine, SVM)及二值分类方法识别入侵事件.在谱分析特征提取方法中,对监测信号先后进行本征模态分解、小波分解和重构,然后提取监测信号的高阶谱分析特征,最后用SVM和反向传播神经网络进行信号分类[20].在毕福昆等人[21]提出的基于基音分析特征提取方法中,提取监测信号的平均幅差特征参数作为信号的特征向量,再用门限阈值法区分4种入侵事件.在傅里叶分解的特征提取方法[22]中,对监测信号傅里叶变换后计算不同信号在各频段的能量占比特征,作为识别不同入侵事件的特征,最后采用线性判别分析分类器识别信号类型.在运用门限过零率和稀疏编码的特征提取方法[23]中,分为2个步骤:首先提取过零率,用于识别入侵振动事件是否存在;然后,用稀疏自编码神经网模型提取信号的高维特征,并用神经网络方法识别4种模拟的入侵事件.
2.3 提取信号波形特征的提取及识别方法
提取信号波形图特征的方法,即提取监测信号示意图的直观信号统计特征的提取方法.Seedahmed等人[24-25]提出光纤振动信号的过零率概念,过零率表示在一定时间内,信号线与预定阈值线的相交次数.用信号的过零率及其表示的其他统计参数组成特征向量,然后用阈值方法检测或识别入侵事件.Seedahmed等人[26]还提取电平过零率、持续时间、最大振幅强度等参量,组成特征向量,利用人工神经网络及决策树方法识别入侵事件.
2.4 分析和比较
在对光纤信号特征提取的3种方法中,大多数采用小波分解特征提取方法,其特点是计算量较大,特征向量的维数也较大,在应用中需要占用较大的计算资源,适用于探测在正常信号中夹带的瞬变反常信号并分析其成分;第2类特征提取方法则适用于一些特殊情形,如基于视频分析的方法适用于具有明显非平稳特征的故障信号识别,本征模态分解法适用于非平稳性、非线性过程信号的特征提取,傅里叶分解的方法则是计算时间较长;基于波形统计参数的特征提取法变化敏感,应用中容易产生误报现象,缺乏通用性.
在上述3种光纤入侵事件的识别方法中,经验阈值识别法需人工确定阈值,适应性较差.支持向量机识别方法不适用于解决多分类问题,需要人工确定核函数.阈值法和支持向量机方法都有一定的局限性,而神经网络识别方法则应用比较广泛.但是神经网络识别方法要求采集较多的实验样本,且目前对光纤入侵事件的正确识别率(或测试识别率)不高.
本文对光纤振动信号进行可视化分析,提取包括时域和空域的2维光纤振动信号的特征,运用约束极速学习机(constrained extreme learning machine, CELM)算法识别5种光纤入侵事件,实验表明,CELM算法提高了正确识别率.
3 基于CELM算法的光纤振动信号识别
3.1 5种事件的光纤振动信号
在没有受到外界入侵时,光纤安防监测系统工作在正常情况;当有外界入侵事件发生时,光纤振动监测信号发生变化,主要表现为短暂和突发振动.在时频分析方法中,处理的参量主要是过零率和能量(也称作短时平均能量)[27].
假定信号序列为x(n),n=0,1,…,N-1,这里N为窗函数的时长,则能量函数表达式为
(2)
其中ω(n)为窗序列值,n=M-1,M-2,…,N-1,M是相邻窗之间的位移对应的采样点数.
当信号的连续2个采样值的符号不同时,若把信号当作连续函数对待,则信号必须经过零值,称作过零,每秒时间内过零的次数称为过零率,它被用来描述信号频谱的大致特性.过零率的表达式为
(3)
挖掘机挖掘、人工挖掘、汽车正常行驶这3种光纤振动事件引起的光纤振动信号见图2~4所示(人员行走和噪声这2种入侵事件的光纤振动信号图略).其中,图2(a)、图3(a)、图4(a)是过零率示意图;图2(b)、图3(b)、图4(b)是能量图;图中横坐标是采样地点,采样点间隔约为1 m;纵轴是采样次数,采样时间周期大概是426 ms;竖轴表示过零率或能量.
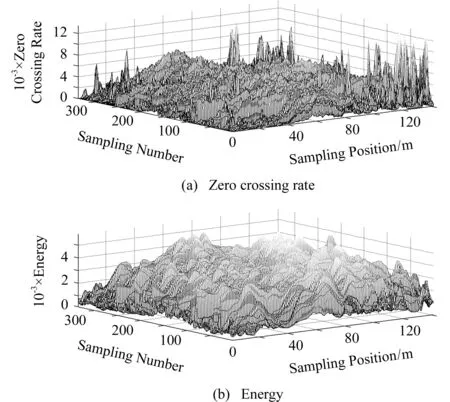
Fig. 2 Optical fiber vibration signal caused by excavator excavation图2 挖掘机挖掘事件的光纤振动信号图

Fig. 3 Optical fiber vibration signal caused by manual excavation图3 人工挖掘事件的光纤振动信号图
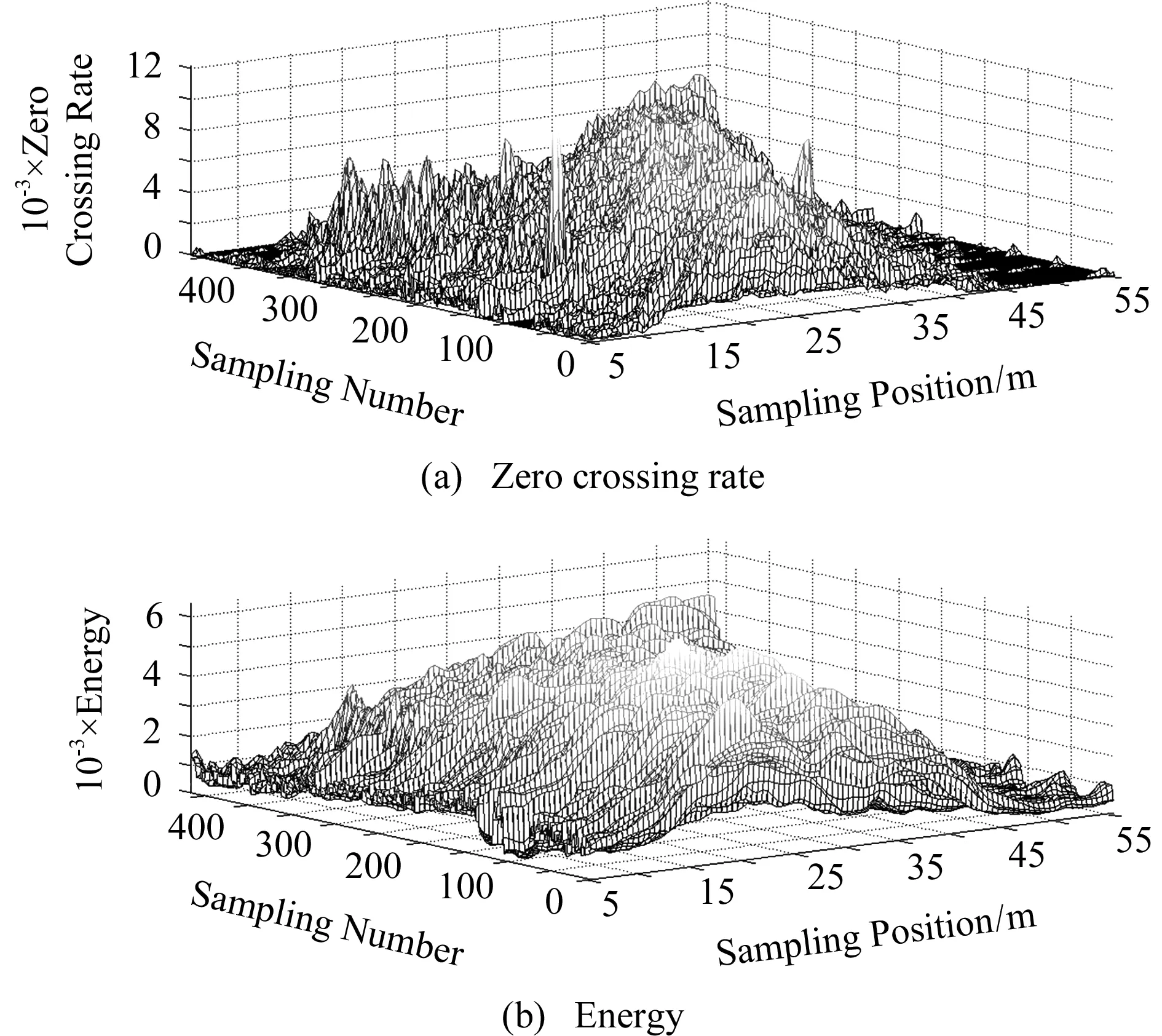
Fig. 4 Optical fiber vibration signal caused by driving vehicle图4 汽车行驶事件的振动信号图
在没有外界入侵事件发生时,安防系统监测信号的过零率和能量都较小且是平稳的;当有入侵事件发生时,监测信号的振幅和频率都会增大,过零率和能量也将增大.在一些弱小的入侵事件发生时,监测信号的能量变化可能不突出,但此时信号的过零率和平常信号仍存在一定差异.综上分析,能量和过零率的变化信息能比较客观地反映光纤安防监测系统是否受到外界入侵事件的干扰.
3.2 光纤振动监测信号的特征提取
基于3.1节的分析,本节探索5种光纤振动监测信号的多种特征提取方法.一般来说,信号的特征参数越多,描述信号特征的能力越强.基于这样的考虑,尝试同时运用过零率、能量、包络(取16个分量)、傅里叶变换参数(取64个分量)这4个参数,组成1个82维的特征向量,这里包络是指反映高频信号幅度变化的曲线;此外,对这4个参数的各种组合,如三元组(过零率、能量、包络)、(过零率、能量、傅里叶变换参数)、(能量、包络、傅里叶变换参数),二元组(过零率、能量)、(能量、包络)、(能量、傅里叶变换参数),以及单个参数作为特征向量,对5种入侵事件进行了探索性的实验,发现本文所提的特征提取方法具有较好的效果.
本文从各个实验的能量数据中,选择位于奇数阶方块的中心能量值超过预定值的n×n(n=3,5,7,…)区域数据,以及在过零率数据中相同位置和时间的同样大小数据块,将两者结合起来组成1×(2×n×n)维的特征向量,作为实验样本.
如图5~7分别是挖掘机挖掘、人工挖掘、汽车行驶这3种入侵事件的监测信号的过零率和能量特征样本示意图(人员行走和自然噪声这2种入侵事件的光纤振动信号图略).图中的特征样本小方块以矩阵方式排列,坐标的横轴和纵轴分别表示特征样本小方块所在的行号和列号.图5(a)、图6(a)、图7(a)是过零率的特征样本,图5(b)、图6(b)、图7(b)是能量的特征样本,图5~7中1个小方块代表1个3×3的特征样本,而图5~7都含有20×20个这样的小方块.
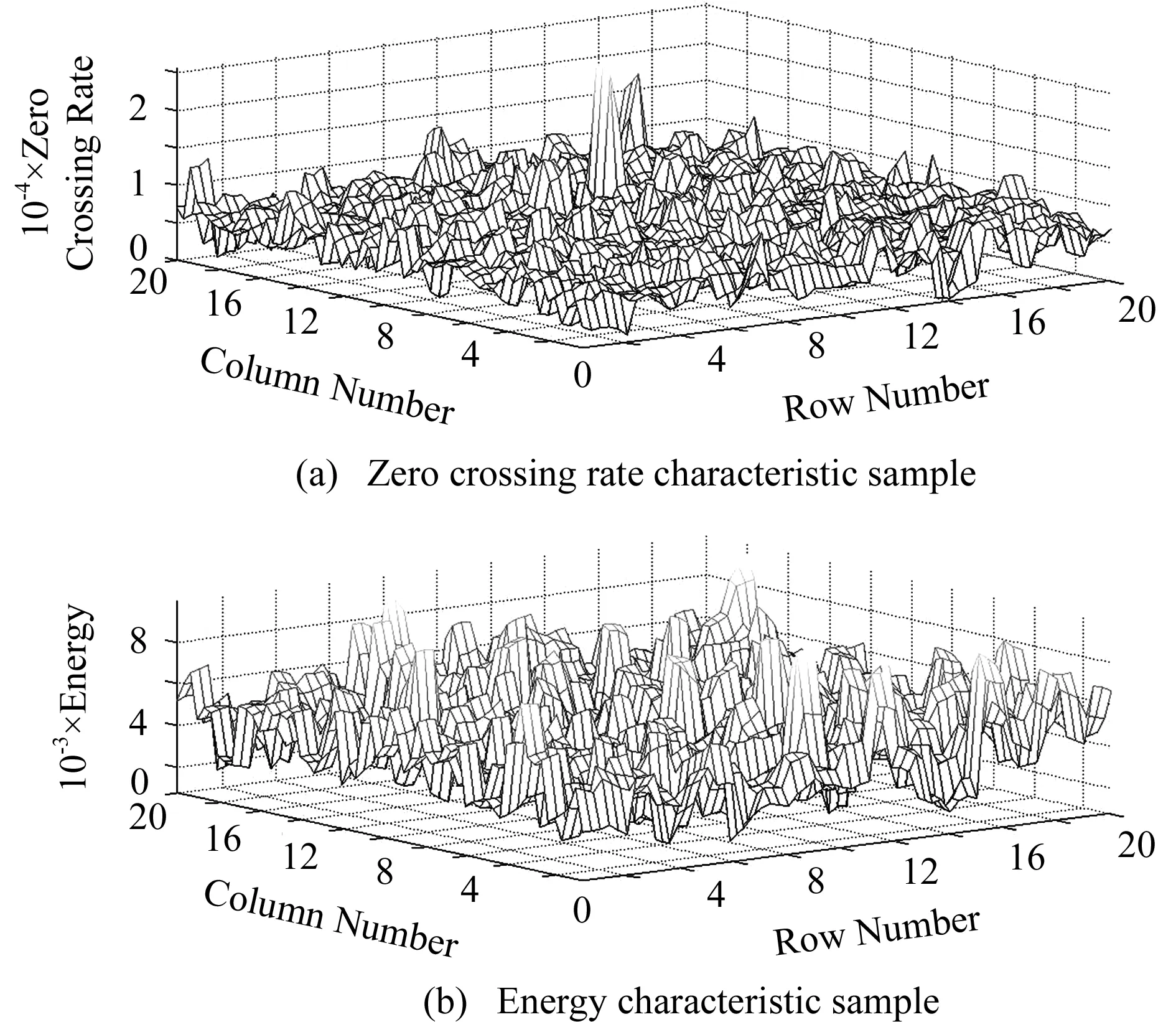
Fig. 5 The characteristic sample of optical fiber vibration signal caused by excavator excavation图5 挖掘机挖掘的光纤振动信号特征样本
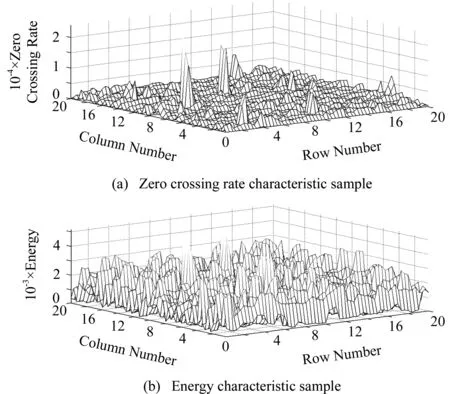
Fig. 6 The characteristic sample of optical fiber vibration signal caused by manual excavation图6 人工挖掘的光纤振动信号特征样本

Fig. 7 The characteristic sample of optical fiber vibration signal caused by driving vehicle图7 汽车行驶的光纤振动信号特征样本
从图2~7可见,不同类型的入侵事件引起的过零率和能量特征样本各不相同,且外观结构比较复杂,特征不显著.极速学习机算法能够从大量复杂数据中找出规律,抓住信号的本质特征,并建立模型.这是采用约束极速学习机方法识别光纤振动入侵事件类型的出发点.
3.3 基于CELM算法的光纤振动信号识别
按照入侵事件的危害性,把挖掘机挖掘、人工挖掘、汽车行驶、人员行走和自然噪声这5种事件分为3个等级:1)紧急事件,指有很强的破坏性,需紧急处理的入侵事件,包括挖掘机挖掘、人工挖掘;2)重要事件,指有较大的破坏性,需尽快处理的入侵事件,包括汽车行驶、人员行走;3)一般事件,指没有破坏性的事件,包括自然噪声事件.紧急的破坏事件的预警级别应当先于其他事件,而重要事件应当先于一般的噪声事件.经过实验表明,对于机器学习方法,采用二分类任务决策树模型的正确识别率比一次性完成多分类的正确识别率更高,因此,采用决策树二分类模型,在决策树每个结点对应一个识别任务.
2004年,Huang等人[28]提出的极速学习机(extreme learning machine, ELM)模型,很快得到广泛应用[29].极速学习机是一类前馈神经网络的机器学习算法,其主要特点是隐含层节点参数可以随机或人为给定且不需要调整,学习过程仅需计算输出权重.ELM具有学习效率高、泛化能力强的优点,被广泛应用于分类、回归、聚类、特征学习等问题的研究中。
极速学习机中隐含层权重参数的完全随机性,往往无法表示出输入样本的判别性特征.这些非约束随机参数使得极速学习机需要产生很多隐层节点,才能达到比较满意的泛化性能.但是,更多的隐节点意味着更长的训练和测试时间,以及出现过拟合的可能性增加.有研究表明[30],类间样本差向量对于分类任务是很有效的.文献[31]提出的约束极速学习机方法,用基于样本的类别先验信息产生从输入层到隐含层的权值,即以样本向量的线性组合作为极速学习机网络结构中的隐层权值.其目的是在特征空间中将不同类别的样本分割在不同的区域内,即在隐含层中提取判别性特征.
约束极速学习机算法通过将极速学习机中完全随机的权值向量参数约束在一定范围之内,并不是完全随机的向量.基于类间样本差向量的约束极速学习机(constrained difference extreme learning machine, CDELM)算法是把不同类型样本之间的差向量作为权值向量,而基于混合向量的约束极速学习机(constrained mixed extreme learning machine, CMELM)算法则是把类间样本差向量、类内样本和向量作为权值向量.通过在典型数据集上验证表明,各约束极速学习机的正确识别率都有不同程度的提高.
利用基于样本向量之差极速学习机和基于混合向量约束极速学习机方法识别5种光纤入侵事件.
3.3.1 决策树模型
决策树模型是一种常用的分类方法,基于树结构进行决策.决策树是一种监督学习模型,给定一个样本集,通过学习得到一个分类器,能够对新出现的对象进行正确的分类.这里采用二分类任务决策树模型,根结点对应全部的样本,叶结点是相应的决策结果,其他结点则对应某种属性测试;从根结点到每个叶结点所经过的路径对应一个属性判定序列.
对光纤振动监测信号的识别流程见图8所示.按照入侵事件等级划分,建立决策树中各结点对应的样本类型,并将图8中各结点的分类任务分别标记为第1~4阶段任务.
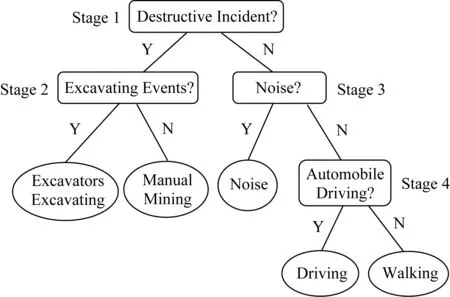
Fig. 8 Flow chart for identifying optical fiber vibration signals图8 安防监测信号识别流程图
3.3.2 约束极速学习机算法
对于任意N个不同样本(xi,yi) ,其中xi=(xi1,xi2,…,xin)T∈Rn,yi=(yi1,yi2,…,yim)T∈Rm,则前馈神经网络的输出可表示为
(4)
xj∈Rn,ai∈Rn,βi∈Rm,
其中,x=(x1,x2,…,xN),G()是激励函数,L是隐层节点数,ai=(ai1,ai2,…,ain)T是输入层到第i个隐层节点的输入权值系数,bi是第i个隐节点偏置;βi=(βi1,βi2,…,βim)T是第i个隐节点的输出权值向量;ai·xi是向量ai和xi的内积.
若该神经网络能以零误差逼近N个样本,则存在ai,bi,βi,使
(5)
j=1,2,…,L,
式(5)可以化简为Hβ=Y,其中:
H(a1,a2,…,aL,b1,b2,…,bL,x1,x2,…,xL)=
(6)
H是神经网络的隐层输出系数矩阵,在极速学习机算法[25]中,可任意给定输入层系数和偏置,上述前馈神经网络的训练要求出输入层系数的最小二乘解,输出层系数矩阵β可由下式计算得到
其中,H+表示H的伪逆矩阵.
在约束极速学习机算法[31]中,输入权值和偏置向量不是随机给定,而是从训练集得到.
在基于类间样本差向量的约束极速学习机算法中,从训练集中随机选出2个不同类别的样本Xc1和Xc2,得到差向量Xc2-Xc1,对其进行标准化后得
以此作为输入层到隐含层节点的一个权值向量,由L对样本组成输入权值矩阵.
同时,计算相应的偏置向量
(7)
其中L2表示向量的2-范数.

(8)
偏置向量的另一半分量在实数区间[-1,1]中均匀选取.
理论上,CDELM尝试在隐含层中提取判别性特征.极速学习机的隐含层中完全随机参数不总是能够表示判别性的特征.有研究表明,类间样本差向量对于分类任务很有效.将极速学习机的权值向量参数随机产生约束在类间样本差向量的封闭集合中,而不是任意向量的开放集合中.从输入层到隐含层的神经元的本质是将原始样本映射到这些向量张成的判别性特征空间中.在该特征空间中,样本可以很好地分开.随机使用类间样本差向量产生从输入层到隐含层的权值向量,类间样本差向量可以将样本映射到比极速学习机更具有判别性的空间中.用基于样本的类别先验信息来产生从输入层到隐含层的权值.这样做的目的是在特征空间中将不同类别的样本分割在不同的区域内.CDELM的本质是约束隐神经元的输入连接权的方向和从一类到另一类的方向一致,因此将随机权值选取约束在由类间样本差向量的集合中.
CMELM使用类间样本差向量和类内样本和向量的混合向量,构建从输入层到隐含层的权值.CMELM首先按照基于类间样本差向量的约束极速学习机产生一半数目的隐层权值和相应的偏置;然后按照基于类内样本和向量的约束极速学习机产生一半数目的隐层权值和相应的偏置;最后将从输入层到隐含层的权值设为这些向量和偏置.由于最后一层的线性性质,CMELM事实上是基于类内样本和向量的约束极速学习机和基于类间样本差的约束极速学习机的模型平均.
4 实验结果及分析
实验的目的是: 1)参数寻优,即寻找光纤信号特征提取方法的合适参数,包括实验样本的数据块大小n、约束极速学习机算法中的激励函数和隐层节点数目;2)约束极速学习机识别光纤入侵事件的效果.实验数据来自合作方提供的真实数据,包括人工挖掘、挖掘机挖掘、汽车行驶、人员行走和噪声分别产生的光纤振动数据,采集的数据主要有过零率、能量以及相应的光纤传感器空间位置.
1) 实验平台.联想品牌的笔记本Y400、内存12 GB、机械硬盘120 GB、微软Windows 10 专业版操作系统,应用软件Matlab(2016a).
2) 实验设计.在参数寻优的实验中,分别选取3种尺寸大小(n×n,n=3,5,7)的数据方块作为样本;约束极速学习机算法中的激励函数,考虑常见的5种激励函数为Sigmoid,Sine,Hardlim,Triangular basis,Radial basis分别对2种约束极速学习机算法进行训练和测试;在隐层神经元个数的寻优中,考虑的隐层神经元个数分别为100,200,500,700,1 000,2 000,5 000,7 000,10 000.通过实验结果表明,分别选取3种不同大小(n×n,n=3,5,7)的数据块作为训练和测试样本对事件的正确识别率的影响不显著,但提取3×3数据块的特征样本的正确识别率略高.另外,激励函数对CELM算法实验结果的影响不显著,此外,我们还对不同隐层神经元数量对正确识别率的影响进行实验.提取的实验样本总数约为4万,样本集的23用于训练神经网络模型,另外13用于测试.实验中的识别过程按照图8所示的识别流程进行,对光纤振动信号整个识别过程分为4个阶段:第1阶段分辨出紧急事件和非紧急事件;第2阶段在发生紧急事件时判断紧急事件的类型,即事件属于挖掘机挖掘还是人工挖掘事件;第3阶段是在发生非紧急事件的情况下判断是否是自然噪声,如果不是则进入第4阶段任务,识别汽车行驶和人员行走.
4.1 CELM算法分析
识别算法中,首先需要确定特征向量.上文已经完成选取特征向量工作的一部分,但特征向量的维数仍待定.其次,CDELM和CMELM这2种算法中,隐层节点个数和激励是待定参数.下面的实验将为特征向量的维数、隐层节点个数和激励函数的确定提供支撑.
4.1.1 数据块大小对识别率的影响实验
根据图8所示的实验流程,用3种大小的n×n(n=3,5,7)的数据样本进行实验,其中大小为3×3的数据块样本总数约为4万,分别用CDELM算法、CMELM算法在各阶段的实验结果见表1、表2以及图9、图10.

Table 1 Experiments of CDELM on Different Size Samples表1 CDELM对样本不同维数的实验
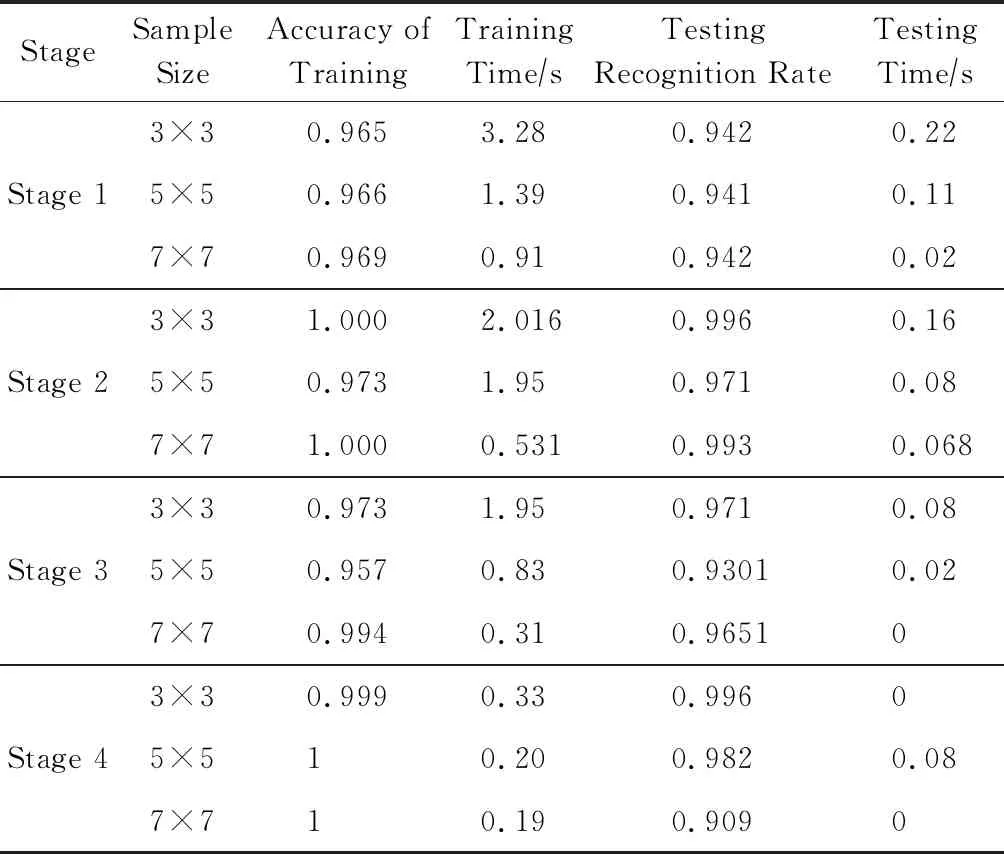
Table 2 Experiments of CMELM on Different Size Samples表2 CMELM对样本不同维数的实验
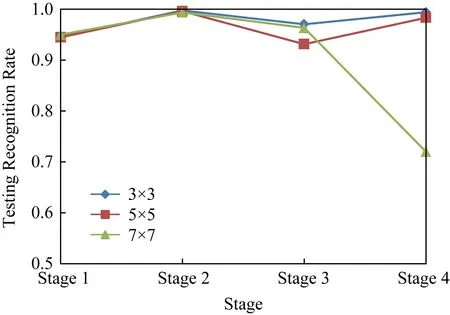
Fig. 9 The recognition rate of CDELM for different size samples图9 CDELM对样本不同维数的识别率
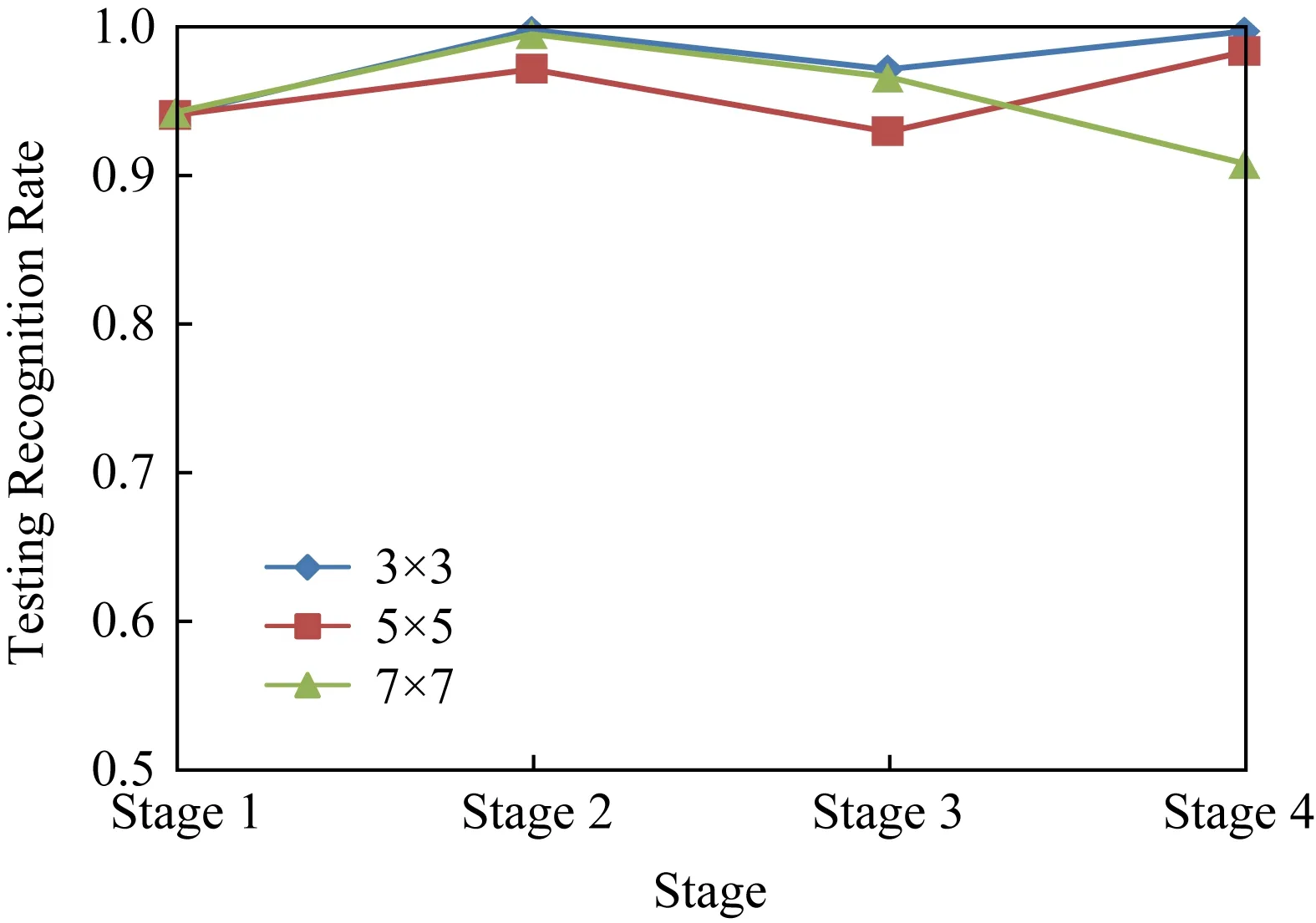
Fig. 10 The recognition rate of CMELM for different size samples图10 CMELM对样本不同维数的识别率
从表1和表2中可见,除个别情况之外,2种约束极速学习机算法对于3×3样本的识别率都略高于用5×5和7×7样本进行实验的识别率,但相差不大.另外,在训练时间上的差异明显,这是由于样本数量上的差异造成的.
4.1.2 激励函数对识别率的影响实验
分别用5个常见激励函数Sigmoid,Sine,Triangular basis,Radial basis,Hardlim对2种约束极速学习机算法进行训练和测试,这里的特征样本取3×3数据块,隐层节点个数为500.这些激励函数在各实验阶段的结果见图11和图12.可以看出,CDELM和CMELM算法在激励函数为Sigmoid时在各阶段的正确识别率较高,且表现较为平稳.

Fig. 11 The correct recognition rate of CDELM for different excitation functions图11 CDELM对不同激励函数的正确识别率

Fig. 12 The correct recognition rate of CMELM for different excitation functions图12 CMELM对不同激励函数的正确识别率
4.1.3 隐层节点个数对正确识别率的影响实验
选择3×3的特征样本,激励函数选择Sigmoid,对2种约束极速算法中的隐层节点不同个数进行模型训练和测试.表3和表4中都表明,当隐层节点为500个时,识别率达到最高.实验表明,在其余3个阶段的实验结果是类似的.
4.2 实验结果
根据4.1节分析结果,在CDELM和CMELM算法的实验中,选择样本大小为3×3的数据块,选择激励函数用Sigmoid函数,500个隐层节点;ELM算法中的参数与之相同.BP算法实验中,同样选择用500个隐层节点,迭代次数上限为1 000.SVM算法实验采用系统默认选项.

Table 3 Experiments of CDELM on Different Numbers of Hidden Layer Nodes表3 CDELM对不同隐节点数的实验
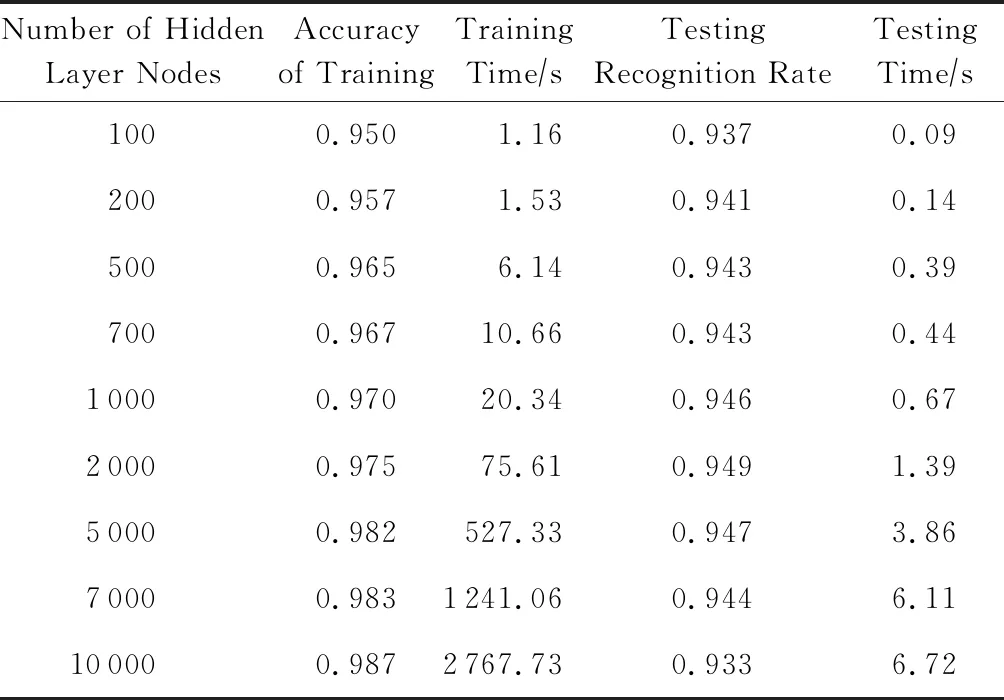
Table 4 Experiments of CMELM on Different Numbers of Hidden Layer Nodes表4 CMELM对不同隐节点数的实验
第1阶段识别紧急事件和非紧急事件,表5中给出了实验结果.实验说明CDELM和CMELM算法的识别率高于其他3种算法,虽然训练时间与ELM算法相近,但比BP,SVM算法则大大缩短.
在第1阶段检测出发生紧急事件时,对挖掘机挖掘还是人工挖掘事件的识别任务在第2阶段进行,实验结果见表6.CDELM和CMELM算法在测试准确率上略高于其他3种算法,在训练时间上比BP,SVM显著缩短.5种算法对2种破坏事件的正确识别率都较高,说明不同事件特征明显.

Table 5 Experiment of Stage 1表5 第1阶段实验
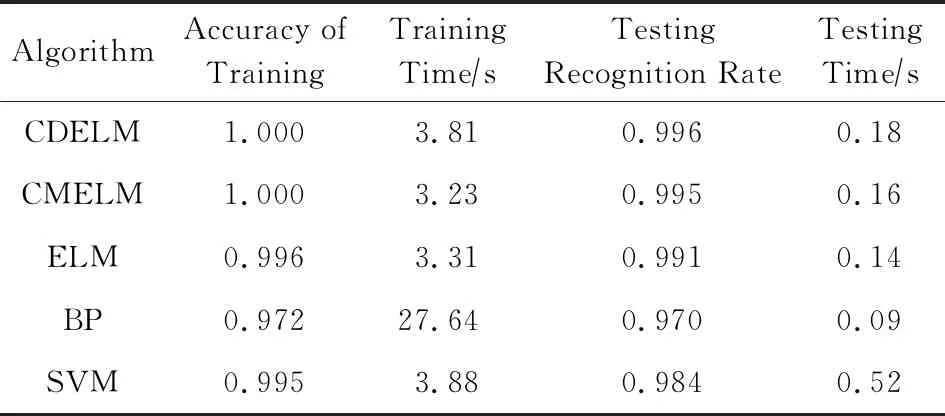
Table 6 Experiment of Stage 2表6 第2阶段实验
在第1阶段检测出发生非紧急事件时,识别自然噪声还是非自然噪声的任务在第3阶段进行.实验结果见表7.从表7中可见,2种约束极速学习机算法CDELM及CMELM的识别率比其他3种算法都高, CDELM和CMELM算法的训练时间比BP算法明显缩短,但测试时间略高于ELM,BP算法.
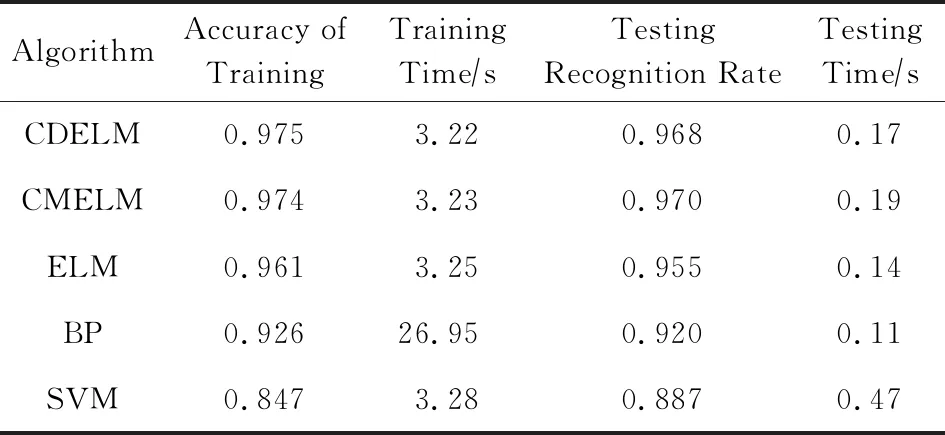
Table 7 Experiment of Stage 3表7 第3阶段实验
在第3阶段检测出发生非重要事件时,识别汽车行驶还是人员行走的任务在第4阶段进行.表8中的实验结果表明,2种约束极速学习机算法的识别率比其余3种方法的识别率都高,在训练时间上,差别不大(除BP算法之外),而测试时间几乎相同.
综合上述实验结果,在第1~4阶段,2种约束极速学习机算法CDELM及CMELM的正确识别率都高于其他3种算法,在模型训练时间、训练正确率上也具备明显的优势.图13对5种算法的实验结果进行比较,表明2种约束极速学习机算法在各阶段的正确识别率都高于其他算法.从各实验结果还表明,CDELM和CMELM这2种约束极速学习机算法在各实验阶段正确识别率相差很小(低于0.002),前者略高于后者,所以图13中2条识别率曲线显示重合.

Table 8 Experiment of Stage 4表8 第4阶段实验
根据光纤振动信号识别流程图,综合在第1~4阶段的实验结果,按照2个关系式进行计算:事件的识别率(叶结点)=从根结点到叶结点各阶段测试识别率相乘;事件的识别时间(叶结点)=从根结点到叶结点各阶段测试时间相加.5种入侵事件的正确识别率和检测过程所需时间,结果如表9所示.可以看出,运用约束极速学习机算法,对各类事件的正确识别率都有显著提高,且训练模型和识别时间差别很小,计算复杂性没有明显增加.

Fig. 13 Comparison of correct recognition rate among five algorithms图13 5种算法的正确识别率比较

Table 9 Recognition Rate and Time of Five Types of Events表9 对5类事件的识别率及识别时间
5 结 论
由于外界导致光纤振动的监测信号具有很强的不确定性,在统计上呈现为随机性、非平稳性和间歇性,导致正确识别光纤振动的事件类型难度较大,现有的各种特征提取方法和识别方法有很强的局限性.对光纤信号的预处理以小波分解处理为主,在实际应用中缺乏自适应性;在对光纤振动信号的识别方法中,以神经网络方法、经验阈值判别法及支持向量机识别方法为主,但正确识别率不高.为提高正确识别率,应对安防系统监测信号进行深入研究,准确地描述不同入侵事件的本质特征.
通过实验,我们提出的特征提取方法和识别方法显著提高了光纤入侵事件的识别率.即在过零率采集数据中,提取3×3的数据块作为特征向量,要求数据块中心对应的能量值超过预定阈值.采用二分类任务决策树模型,分别用CDELM和CMELM这2种约束极速学习机算法识别入侵事件,与ELM,BP和SVM算法相比,显著提高了事件的正确识别率,模型训练时间大大缩短,但测试用时相差不大.
本文特征提取方法的新意主要体现在3方面:
1) 传统的特征提取方法多是在时域维度提取1维的向量信息,而本文提取的样本特征数据则同时包括时域和空域2个维度的信息,这里空域是指物理位置相邻的信号采样点,即提取连续时间、相邻的信号采样点的过零率数据构成的2维矩阵作为实验样本,因此,提取2维信息将比1维信息更加丰富,这符合常理,从我们的实验中证明了这一点.
2) 通过对数据可视化结果分析,发现在高能量的信号采样点的过零率特征、在2个维度(时域和空域)上随不同事件类型而不同,由此决定选取相应区域的过零率数据(2维矩阵)作为选取特征样本数据.
3) 经过实验证明,本文的特征提取方法能满足实时处理、识别和预警的要求.
