直升机气压高度速度传感器原位校准方法研究
2019-09-11张文锋曾建华
张文锋,曾建华
(中国直升机设计研究所,江西 景德镇 333001)
0 引言
在直升机研制及试飞测试中,直升机飞行位置和姿态等信息对直升机的稳定控制至关重要,而气压高度、速度传感器作为其主要信息获取的方式之一[1],其数据是否准确将直接影响飞行安全[2],因此必须对其关键技术指标进行定期校准。虽然传统实验室校准方法可信度高,但其校准周期长,且重复拆卸与安装传感器对整个机身管路的密封性及传感器本身都带来风险;此外,传感器实际工作使用过程中环境条件的改变、传感器内部管路的相互连接均可能对测量结果存在影响,传统实验室校准方法无法复现传感器的真实工作情况,无法准确对其实际工作中的数据是否准确进行有效评估。因此,必须开展气压高度、速度传感器原位校准工作。本文提出了原位校准方法,利用该方法校准了传感器且进行了验证,满足当前型号该类传感器的原位校准需求,确保试验试飞中数据的准确可靠。
1 校准原理及装置要求
1.1 校准原理
直升机高度、速度参数的测量主要利用安装在飞机头部的空速管进行气压感受,产生相应的静压和动压信号,并作用于与其相连的气压高度、速度传感器从而产生相应的电信号[3]。在校准试验现场,通过空速管上的静压孔和动压孔,标准压力源输出不同的压力值给气压高度、速度传感器,通过数据采集设备采集传感器电量输出值,利用输出值计算其校准结果是否满足要求,从而达到校准高度、速度传感器的目的。原位校准系统原理如图1所示。原位校准时,机上高度速度传感器的振动、环境温湿度、管路、电磁场环境等情况,均与实际工作情况一致,因此,原位校准结果可信度更高。

图1 原位校准系统原理图
1.2 校准装置及要求
校准装置主要由标准压力源、数据采集器、电源、气路软管、专用工装、计算机和相关软件组成,如图2所示。标准压力源用于向高度速度传感器提供标准压力信号;数据采集器实现传感器输出信号的测量;电源向标准设备供电;气路软管搭建标准设备输出端与空速管上工装入口的连接;专用工装实现空速管上静压孔和动压孔的密封;计算机及软件存储校准数据并分析计算校准结果。
气压高度、速度传感器原位校准装置,应在不影响直升机高度、速度测量系统正常工作的前提下实现原位校准功能,且作为计量标准设备,应具备良好的不确定度指标[4],即:①整个标准设备引入的扩展不确定度应小于被测传感器最大允许误差绝对值的1/4;②具有良好的控制稳定性能,工作温度范围宽,易携带;③管路接口应具有良好的匹配及密封性。
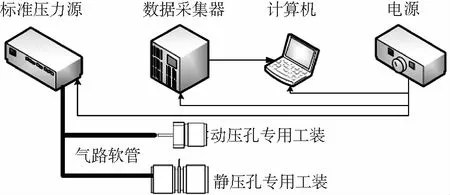
图2 原位校准装置示意图
2 校准方法
2.1 气压高度传感器校准
与传统的实验室拆卸后单个校准方法不同,因直升机机身内部气压高度传感器的静压端与速度传感器的参考端相互连接,为了防止校准气压高度传感器的过程中对速度传感器造成损坏,需将空速管上的静压孔(Ps)和动压孔(Qc)的工装入口利用气路软管分别连接至标准压力源的测试端。在校准管路搭建完成且密封性测试合格的情况下,将标准压力源的压力输出模式调为绝压模式,然后参考规程要求[4],测量范围内至少均匀或合理地设置5个校准点。校准时从压力下限开始,待标准压力源达到目标点时,计算机通过数据采集器采集此时的电量输出值。逐点升压至测量上限,依次采集上行程各目标压力点的电量输出值。然后,逐点降压至测量下限,倒序采集各目标压力点的下行程输出值。上行程和下行程校准为1个循环,如此进行2个循环。为了消除标准压力源的测试端与静压孔和动压孔的高度差,校准时尽量将三者放置在同一水平面上,具体校准方法如图3所示。
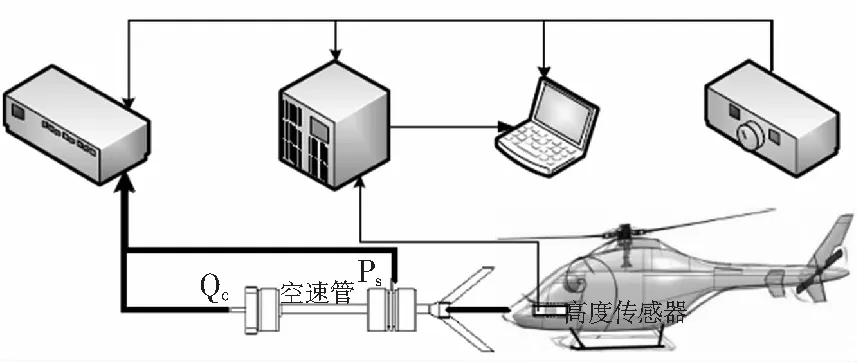
图3 气压高度传感器校准方法示意图
2.2 气压速度传感器校准
在完成上述气压高度传感器校准后,只需将空速管上动压孔(Qc)的工装入口通过气路软管连接至标准压力源的测试端,静压孔(Ps)与大气连通即可。在校准管路搭建完成且密封性测试合格的情况下,将标准压力源的压力输出模式调为表压模式,然后参考规程要求,后续校准步骤与气压高度传感器类似,具体校准方法如图4所示。
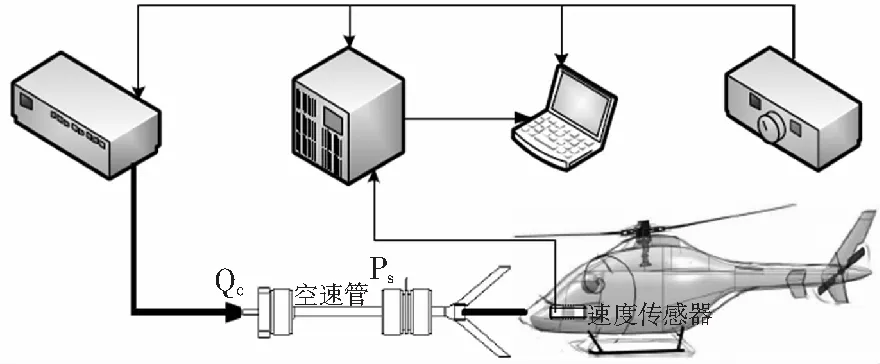
图4 气压速度传感器校准方法示意图
2.3 不确定度计算
气压高度、速度传感器测量误差不确定度来源[5]主要有标准压力源引入的不确定度分量μ(p)、数据采集器引入的不确定度分量μ(v)。现以校准测量范围为(0~1)psi、输出(2.5~5)V、0.5级的气压速度传感器为例,标准压力源输出压力最大范围15kPa(2.2psi),最大允许误差±0.01%FS, 在(15~45)℃范围内使用时,温度影响可忽略。数据采集器的最大允许误差为±(0.0024%读数+50μV),使用时,环境温度超过(23±5)℃时温度影响为±10μV/℃。
1)标准压力源引入的不确定度分量μ(p),标准压力源与被测传感器之间高度差影响忽略,因此,标准压力源最大误差不超过±1.5Pa,按均匀分布,则:

(1)
2)数据采集器引入的不确定度分量μ(v),主要是数据采集器的示值误差引入的μ(v1)、测量重复性引入的μ(v2)和环境温度变化引入的μ(v3)。
示值误差不超过±0.17mV,按均匀分布,则:

(2)
对气压速度传感器进行2个循环的测量,每个校准点均有4次读数,由此计算各个校准点的试验标准偏差,取最大值,则s=2.3mV,则:

(3)
考虑可能存在的环境温度影响,取最大值,按均匀分布,则:

(4)
因此:

(5)
3)合成标准不确定度:

(6)
4) 扩展不确定度:
U=kuc(Δv)=2.40mV,k=2
(7)
被检传感器的最大允许误差为12.5mV,从上面分析可知,整套原位校准装置最大引入的测量扩展不确定度小于被检传感器允许误差的1/4,即3.125mV,因此本套校准装置满足要求。
3 校准结果验证

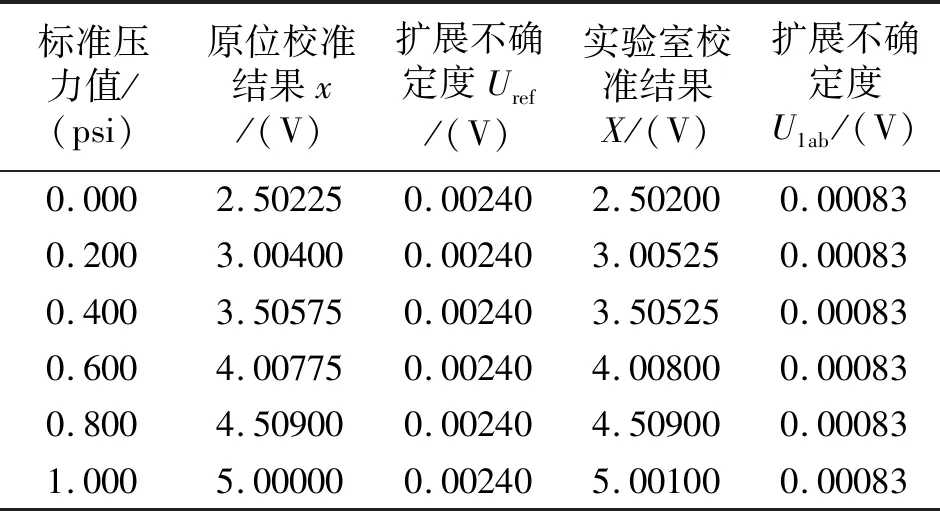
表1 原位校准与实验室校准结果
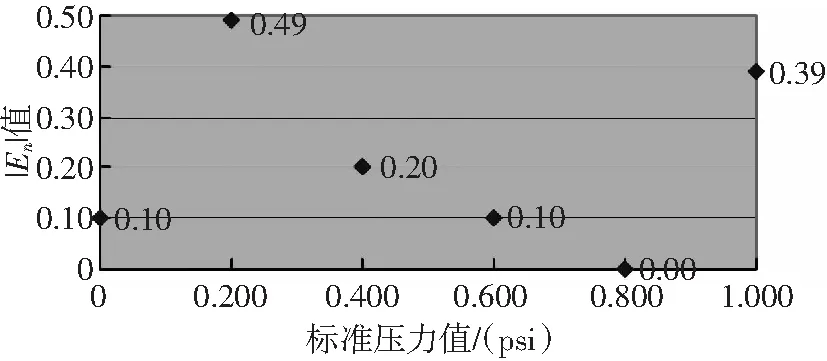
图5 各点校准结果|En|值分布图
4 结论
直升机气压高度、速度传感器原位校准方法目
前已应用于部分型号直升机机载高度、速度传感器的校准,该校准方法具有以下三个特点:
1)本文校准方法针对被检传感器的实际工作环境条件开展校准,校准数据真实、准确、可靠,对后期客户使用校准数据具有更高的应用价值;
2)与传统校准方法相比,原位校准避免了被检传感器的拆卸与安装,大量节省了维护时间,同时杜绝了因拆卸不当造成的人为故障与损伤,大幅度缩短了校准时间,提高了校准工作效率;
3)本文针对直升机气压高度、速度传感器的原位校准方法,对后续其他类机载传感器开展原位校准有很好的借鉴作用。
