诊断、预测和系统健康管理技术在直升机航空电子系统的应用
2019-09-11陈圣斌沈亚斌曾曼成
胡 磊,陈圣斌,沈亚斌,曾曼成
(中国直升机设计研究所,江西 景德镇 333001)
0 引言
目前直升机按以可靠性为中心的维修(MSG-2)的要求广泛采用定时维修、视情维修和事后维修(状态监控)三种维修方式,其中航空电子系统及其部件/设备,基于其随机故障的特点和系统组成,都采用状态监控或事后维修方式。从基于状态维修的角度看,这种维修方式,使产品使用寿命达到了极致,但是也存在如下缺陷:
1)飞行中出现故障之后,未能及时采取措施,设备中某一电路故障,将危及与其相连接的其它电路。例如,直流电源系统中的电压调节控制保护装置,如电源电路短路,有可能使与其相连的调压电路板,过压保护和过流保护电路板等造成功能破坏,甚至引起着火或冒烟危险。
2)当余度系统相同结构的设备发生共模故障时,系统中相同设备都会失效,造成飞行事故, 不能执行飞行任务,甚至影响飞行安全。如机上多功能显示器都失效,直升机有可能失去所有飞行信息,从而无法进行飞行控制。
3)特别是由于这种维修方式是基于MTBF值来计划备件供应,在许多情况下(严酷的海上或深海飞行中)会由于备件供应不足造成停机飞行。
4)虽然这种维修方式借助机载的BIT功能使外场维修的平均修复时间(MTTR)较短,但在中继级仍有大量维护检查工作,它们的预防性维修时间(MPMT)较高。另外由于BIT的虚警率较高,也会产生误拆卸。
航空电子系统诸如上述的问题,使得这种维修方式对航电系统造成了较重的维修负担。
随着航空技术和航空电子技术的发展,目前美国正在开发一种包括动力、传动、结构、旋翼、电气和液压-飞行操纵等旋翼航空器6个主要系统的故障诊断、预测和健康管理系统,以便使这6个系统的故障实现综合管理,使6个系统实现基于状态维修(CBM),以降低维修负担,提高安全性和使用可用度。
本文认为航空电子系统的状态监控也可以融入到这一诊断、预测和健康管理系统中,从而将航空电子系统由事后维修或状态监控转化为基于状态维修,消除事后维修存在的问题,降低维修负担,提高安全性。
本文根据上面的思路,首先应用故障物理的科学方法,论述了现代航空电子系统的开路/短路、导电不良等主要故障模式不是传统可靠性认为的随机故障,而是像结构部件、动部件那样,是一种随使用时间累积而发生的耗损性故障,它们也适用诊断、预测和健康管理技术进行状态监控;然后在COST-A的诊断、预测和系统健康管理技术的基础上,讨论了将航空电子系统融入到COST-A系统中,实现航电系统诊断、预测和健康管理;最后提出这种诊断、预测和健康管理技术的获益和未来的发展方向。
1 航空电子系统/设备的主要故障模式
1.1 航空电子系统/设备故障机理的重新认识
所谓故障物理方法,是使用科学的方法,如后面所说的工程设计分析方法[1-2],识别元器件、部件和系统的故障根因机理及故障发生过程,并形成知识库,以便今后必要时应用。下面基于这种方法详细地分析现代航空电子设备的故障发生过程及失效机理,以确定航空电子系统和设备的主要故障模式。
现代航空电子设备基本上是由半导体器件和集成电路组成的复杂的组合结构,典型的印制电路板是多层玻璃纤维环氧树脂片的叠合结构。板上穿有许多孔体镀铜孔,并焊有元器件、引线和一些集成电路的扁平封装器件。在这种结构中,几种材料的热膨胀系数和刚度都有相当大的差别,因而它们之间存在着一系列的热失配和刚度失配。而电子设备在使用中因开和关以及使用模态的变换和环境应力的作用,会产生低周热循环和高周振动循环,其部、组件因存在热和刚度失配而经受较大的应力(交变/热应力)。根据断裂力学的观点,在电子元器件中不存在制造缺陷是不现实的。微观裂纹会在交变应力下扩展,最后形成疲劳破坏。因此电子设备的一类主要故障是机械的,疲劳破坏造成电路板的焊点连线等断裂,形成开路故障;另一类是化学性的,由于潮湿或其它化学、生物因素引起电介质退化形成电解质短路及腐蚀,这种腐蚀在接触点生成高电阻薄膜,使电路导电不良。这些说明电子设备的主要故障是机械性的和化学性的,其发展造成的故障(短路/断路)是非随机的。
导致电子设备发生故障的因素是很多的,其中影响最大的是温度、振动、湿度和噪音(显然,这种影响因素与可靠性试验剖面中施加的应力是一致的)。美国空军从外场拆卸下来的故障件表明,有约50%的元器件或连接点有疲劳裂纹,常见的破坏部位是引线接合处、孔的镀铜层、焊点和玻璃封装;另有约45%~50%左右为腐蚀问题,在触点或其它部位形成高阻薄膜。极少故障是因电应力过高而造成的。
由上述电子设备故障过程和故障机理分析可以得出,现代航空电子设备的主要故障模式(开路、短路、导电不良)是随使用过程的累积损伤发展的,而不是随机产生的。因此,根据可靠性物理理论,这种航空电子设备也可应用结构、动部件的应力-强度干涉法及腐蚀损伤的评估法,确定产品寿命[2]。
无疑,COST-A系统的诊断、预测和监控管理技术也适用于航空电子系统/设备。
1.2 电子系统/设备故障模式及其发生位置的确定
一个具体的电子设备必须确定其主要的故障模式(短路故障或开路故障还是导电不良),以便为其检测方法(电流法、电压法或其它方法)及故障检测传感器的设置提供输入。
1.2.1 电子设备具体故障模式的确定
通常采用如下方法确定系统/设备的主要故障模式:
1)基于数据的生成法
这是根据以往的直升机外场使用收集的信息,如基地级、中继级及机载设备制造商修理的相关数据,来确定设备的主要故障模式。
例如:前面所说的COST-A系统的研发过程中,对液压-飞行操纵系统,通过相应数据的挖掘确定其主要故障模式。
① 利用2410数据表(即可靠性外场信息表)及AMRDEC(航空和导弹研发及工程中心)的SME的输入汇编成液压-飞行操纵系统数据库;
② 利用pareto图(排序图)给出系统外场可更换单元拆卸率及非计划维修活动主宰因素排序集;
③ 利用pareto图确定液压泵MTBR参数指标最具影响的重要部件。
经上述信息分析,确定液压泵的外漏及内部故障为主要故障模式。
由此可见,利用分析模型、流量、泄漏检测传感器,能评估状态诊断、预测和健康状态。
2)工程设计分析方法
工程设计分析方法是现代航空电子系统/设备常用的故障分析方法[2]。它利用CAD/CAE建模技术(如应用美国普及型软件CAE APPS)将航空电子设备的物理模型转化为数字模型,然后使之在计算机的应力环境下(温度、湿度、振动、电应力)按试验要求运行/试验,使受试产品发生各种故障(如开路、短路、断续接通、性能退化等),然后从试验结果(自动生成)获得表征该产品的主要故障模式。
当然,应用传统的可靠性试验方法,也能确定产品的主要故障模式。
1.2.2 故障发生位置的确定
对于较简单的系统或部件器故障模式,故障发生的位置和检测方法在确定故障模式时利用基于数据的方法都能得到,但是对于复杂的航空电子设备,则需要利用工程分析方法,分析故障发生的位置。
其分析程序如下(以示例说明):
1)建立CCA模型
某电路板(CCA)物理模型或布置图见文献[2]之图4。利用CALCE PWA软件建立电路板的带有约束条件的CALCE PWA模型见文献[2]之图5。
2)随机振动响应分析
对每一电路板进行随机振动响应分析,以确定在分析所规定的随机振动载荷作用下的前3个振动频率和发生的位移,这一分析结果用于冲击和振动疲劳寿命评估的输入。其分析结果见表2[2],其随机位移见文献[2]之图7。
3)冲击响应和生存力分析
此分析确定冲击脉动造成的位移和最大应力,而生存力分析评估用于与实际最大所允许断板(sut-of plane)的位移和可接受的电路板应力相比较,其结果以故障概率给出。这一冲击分析的结果见文献[2]之表3。
4)振动疲劳寿命评估
根据振动分析输入和运输使用剖面评估CCA部件焊点和部件引线的疲劳寿命。其结果以损伤比给出。损伤比(DR)是寿命时间内的实际循环数除以引起故障的循环数的比值,损伤比大于1,表示故障,其结果见文献[2]之图9。
5)热疲劳寿命评估
焊点的热疲劳寿命评估模型为CCA部件连接(如焊点)提供了疲劳寿命评估,其故障是因PWB和部件之间热膨胀系数(CTE)失配造成的。热疲劳寿命评估结果见文献[2]之图10。
6)组合疲劳寿命评估
组合疲劳寿命评估模型提供CCA部件相连接(如焊点和部件引线)在振动和热载的共同作用下的疲劳寿命评估。此模型使用累积损伤Miner定律,即累积损伤为振动损伤和热循环损伤之和。给出了组合疲劳寿命评估结果见文献[2]之图11。
通过上述分析就能在设计的早期知道航空电子系统/设备最可能发生的故障和故障发生的位置,这为航空电子系统外场可更换单元(LRU)故障监控提供输入,如检测方法、健康和非健康(故障)判别准则,以及运算律模型等。
2 实现诊断、预测和健康管理的技术途径
2.1 基于能力的使用和支撑技术—航空计划(COST-A)
美国陆军航空开发管理局—航空应用技术管理中心(ADD-AATD)和西科斯基飞机公司根据美国国防部提出的后勤转变的战略要求和陆军司令部陆军航空之基于状态维修(CBMT)的行动计划[3,4],于2012-2014年联合负责完成了“基于能力的使用和支撑技术-航空(COST-A)计划”,为旋翼航空器6个主要系统(动力、传动、结构、旋翼、电气和液压-飞行操纵系统)开发和演示/验证了一套高价值的诊断、预测和健康管理技术[5]。该项计划的主要目标是减少计划检查和预防性维修工作,降低使用维修费用,提高直升机的安全性和使用可用度,使6个系统实现基于状态维修(CBM)。
该项计划是与UH-60型机2005年的维修性基值相比较得到的维修性目标值,是:
每飞行小时检查减少50%;
每飞行小时维修人时(MMH/FH)减少12%;
部件平均拆卸间隔时间提高15%;
误拆卸率小于5%;
无故障工作时间:最少为10飞行小时。
2.2 COST-A的诊断和健康管理系统(COST-A系统)
COST-A系统由机载系统(OBS)和地面系统(GBS)两部分组成。其中OBS实现6个系统的诊断、预测和系统健康管理,而GBS完成机载系统未能实现的故障诊断工作(因模糊性)和进行维修规划。COST-A系统组成如图1、图2所示。
2.2.1 机载系统
机载系统组成如下(见图1):
1)IVHMU(综合健康管理装置):这是UH-60直升机IVHMS/HUMS的装置,COST-A的机载系统就是在IVHMU的基础上构建的;
2)PHMU(预测和健康管理装置):该装置(电路板)插接到IVHMU机架上,其功能是在机上进行6个系统的故障检测和隔离,以减少维修排故工作,提高使用可用度;
3)OBN(光电主网络):它使各类装置(数字的、模拟的)信号连接,实现实时、稳定和可靠的通信;
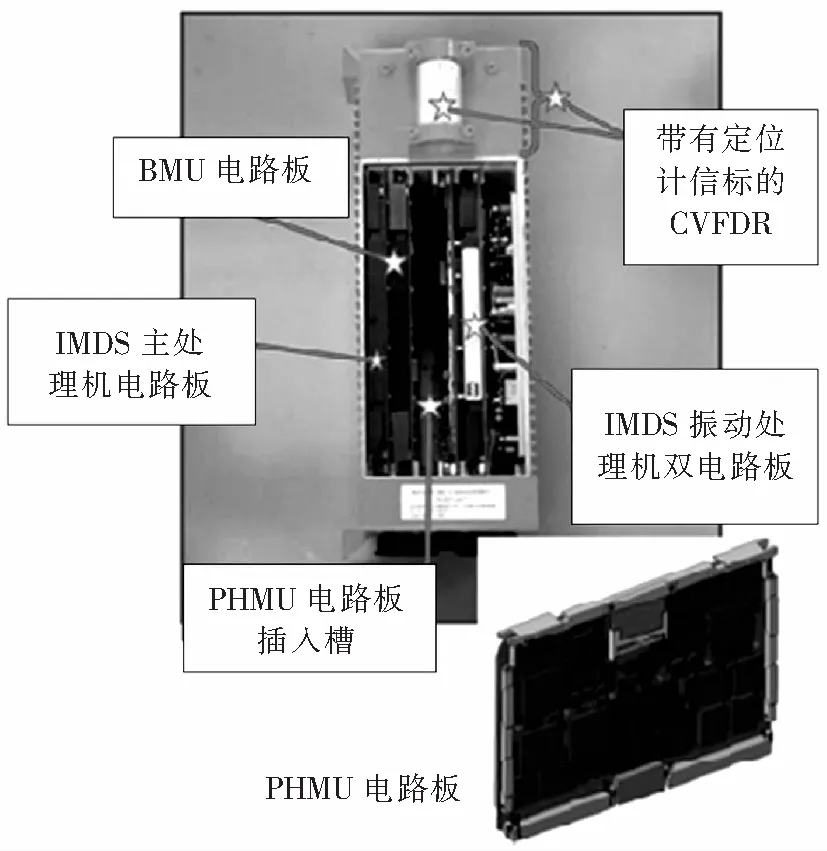
图1 COST-A系统的主要组成部件
4)NAIU(网络采集和接口装置):这是PHMU电路板、OBN和脱机部件(地面系统)之间的主要接口;
5)SSI(传感器系统接口):PHMU经SSI传感器接口连接到OBN上,这是一多物理接口模块,它接纳数字和模拟信号、协议等,该接口实现光电信号的转换。
6)机载软件:机上软件对6个系统提供了先进的机上状态监控诊断和推理运算律,以便提供早期和精确的故障检测和隔离。
2.2.2 地面系统
地面系统组成如图2所示[6]。
1)飞机笔记本:它和机载系统及其软件扩展了IVHMS在机上(UH-60型)陆军平台维修(PMA)软件的功能,增加了6个系统的健康和维修显示。
2)部队(大队或营级)服务器(BAT):应用地面诊断、预测和健康管理工具进一步降低模糊性,预测部件今后的健康趋势,并利用机群的历史数据作出维修规划。
2.3 COST-A诊断、预测和健康管理系统(COST-A系统)运行
COST-A系统的运行或工作原理如图3所示。
1)诊断程序:该程序根据传感器的信息,经处理和规格化后,识别系统中的非正常状态并生成相应的故障模式,使特定部件超限的状态指示(CI)或健康指示(HI)信息传输到维修集生成程序。
2)维修集生成程序:如诊断程序特定部件有两个故障模式“A”和“B”的超限状态指示,则分别生成了维修活动“1”和“2”,即有一个维修活动,这便存在模糊性;
3)故障模式推理程序:该程序接到模糊性信息后,对“A”和“B”两个故障模式的发生概率排序,确定A故障为可能发生的故障;
4)机载维修推理程序:该程序根据“A”故障映射维修集,并生成维修建议;
5)健康累积评估程序:该程序根据“A”故障健康指示的累积评估,形成对高层次的健康指示,并以矩阵方式给出对上层次任务的安全和功能的影响,从而根据GYOR(绿黄橙红)颜色指示,提供着陆时采取的维修措施,即时进行,还是继续观察(这一措施将显示在飞机笔记本显示器上);
6)飞机笔记本程序:该程序一方面给出飞机着陆后采取的维修措施,另一方面对机载系统因模糊性而不能确定的故障继续诊断,从而将故障根因找出,并予以隔离,其维修改进建议在维修显示器上给出;
7)部队服务器:该程序对机载系统健康进行数据累积,利用历史数据(机群)进行维修规划,根据剩余寿命给出部件下一次维修干预的时间,以便进行维修保障规划(备件供应)。
上面的工作原理或系统运行见文献[7]。
2.4 航空电子系统的诊断、预测和系统健康管理技术
1)通过前面航空电子系统设备基于故障物理的分析,确认了航空电子系统/设备的主要故障是因耗损性的疲劳损伤和化学腐蚀造成的断路、短路及导电不良的断续故障,因此航空电子系统也能融入到COST-A系统之中,如同结构、动部件、机电产品(如带液压泵的油箱)那样实现诊断、预测及系统健康管理,使航空电子系统/设备从传统的事后维修(状态监控维修)转换为基于状态维修。
2)由于航空电子系统是由通信、导航、显示、飞行控制、武器/火控等多个分系统组成,因此在美国COST-A系统的IVHMU装置中增加航空电子系统的预测和健康管理装置(电路板)(AVIONIC-PHM电路板)(装置中含软件),实施对航电系统的状态监控。
3)由于航空电子系统都有机载自检测功能,因此采用BIT传感器作为AVIONIC-PHM系统的故障检测装置,但是应提供航电设备(LRU)的故障/失效的状态指示或健康指示门限值。
4)这样航电系统的数据和信息也通过COST-A系统中的OBN、NAIU、SSI与COST-A的IVHMU和航电-PHM相互交联实现信息共享(如航电PHM系统从IVHMU中获取飞行记录数据等进行故障检测等),航电PHMS的数据和信息也可传输到地面系统(地面系统加入航电PHM系统相关要求,如航电设备的故障历史数据)以实现地面系统诊断预测、健康管理功能。
5)航电PHM系统实现其诊断、预测和管理技术的挑战/问题是:
①确定航空电子设备的主要故障模式,通过各种方法,如基于数据生成法、工程设计分析法或传统可靠性(三综合条件)试验获取其故障模式、故障发生的位置,并建立历史数据库,以获取设备的故障数据,建立CI、HI门限值;
②建立表征电子设备故障的模型,可采用数据生成法、物理模型法、神经网络模型法等。根据故障模型形成诊断、预测和健康管理软件,实现诊断、预测和管理功能。
③采用先进的传感器技术。对原机上BIT的传感器重新检讨,以选用先进的传感器,如压电传感器、霍尔效应传感器,这些传感器应选择合理的方法(易于实现且不会增大费用等),或嵌入在要检测的电路中,或设置在设备外面的电缆中(如电缆故障通过扩谱时域发射器(SSTPR)来检测与电缆相连接的电子设备电子模块的断路故障)。
④根据现有资料认真学习COST-A系统的诊断技术、推理技术、模型构建技术、系统集成或综合技术,形成航空电子系统的诊断、预测和系统健康管理技术。
⑤长远设想,建立全机各个系统重要设备的诊断、预测和系统健康管理体系,实现直升机从目前的三种维修转化为基于状态维修,最终实现二级维修体制,消除目前以检查为主的中继级维修。
⑥通过无线电传输,将机载系统信息实时下载到地面系统进行同步处理,实现空-地一体化,使飞机使用维修保障无间隙衔接,进一步减少维修负担,提高直升机使用可用度。
⑦本文仅是系统方案设想,真正的工作还包括参数指标体系、各参数的改进要求,系统/分系统部件及其软件各自研制验证及系统综合的验证确认等大量工作。美国COST-A系统经过2012-2014年累积40多个月的研发,整个系统形成了30多项新的和改进技术,经系统综合试验台验证达到技术成熟度6级(PHL-6)的水平,因此工作是大量的,任务是繁重的。
3 结论
通过上面的论述可以得出:
1)基于故障物理分析,航空电子系统/设备的主要故障模式为短路、断裂、断续通断等,极少为随机故障;
2)航空电子系统/设备故障能应用与结构系统相似的应力-强度干涉法,确定主要故障的发生、扩展和最终影响;
3)基于上面的结论,本文认为,航空电子系统/设备也能采用美国COST-A系统的基础结构建立航空电子系统的诊断、预测和系统健康管理系统,实现基于状态维修,减少维修负担,提高使用可用度和飞行安全。
