基于3D视觉的线结构光测量算法
2019-09-10陈状胡永祥郝晗
陈状 胡永祥 郝晗

摘 要:近年来,已有越来越多的国内外学者对线结构光测量技术展开研究,也取得了大量的成果,但对相机内参数和光平面标定参数有效评估还存在一些问题。本文对线结构光基本理论和关键算法进行理论分析,并进行相机内参数和光平面方程标定实验验证,获得了线结构光测量的理论评估精度。实验结果表明,本方法能够有效评估线结构光测量的精度,测量精度在3um范围内。
关键词:线结构光;3D视觉;相机内参数;光平面标定参数
中图分类号:TP391.41 文献标识码:A 文章编号:2096-4706(2019)22-0033-03
Abstract:In recent years,more and more scholars at home and abroad have carried out research on linear structured light measurement technology and made a lot of achievements. However,there are still some problems in the effective evaluation of camera internal parameters and light plane calibration parameters. In this paper,the basic theory and key algorithm of linear structured light are analyzed and verified by calibration experiment of camera internal parameters and optical plane equation,the theoretical evaluation accuracy of line structured light measurement is obtained. Experimental results show that this method can effectively evaluate the precision of line structured light measurement,which is within the range of 3um.
Keywords:linear structured light;3D visual;internal camera parameter;calibration parameters of light plane
0 引 言
三维扫描时,激光线投射在物体表面,相机获取从另外一个角度的物体表面的激光线图像[1]。激光线在图像中的提取偏差直接影响测量结果的好坏。
在实际应用中,线结构光测量系统快速、精确、稳定性好,而且结构简单,易于实现,相比点结构光提高了效率[2],又避免了面结构光方法的复杂性[3],因此在各个应用领域,如制造业、军事、医学上获得了更广泛的应用
本文介绍了线结构光的基本原理和关键算法,并对相机内参数[4]和光平面方程[5]进行标定实验,获得了线结构光测量的理论评估精度。
1 基本理论
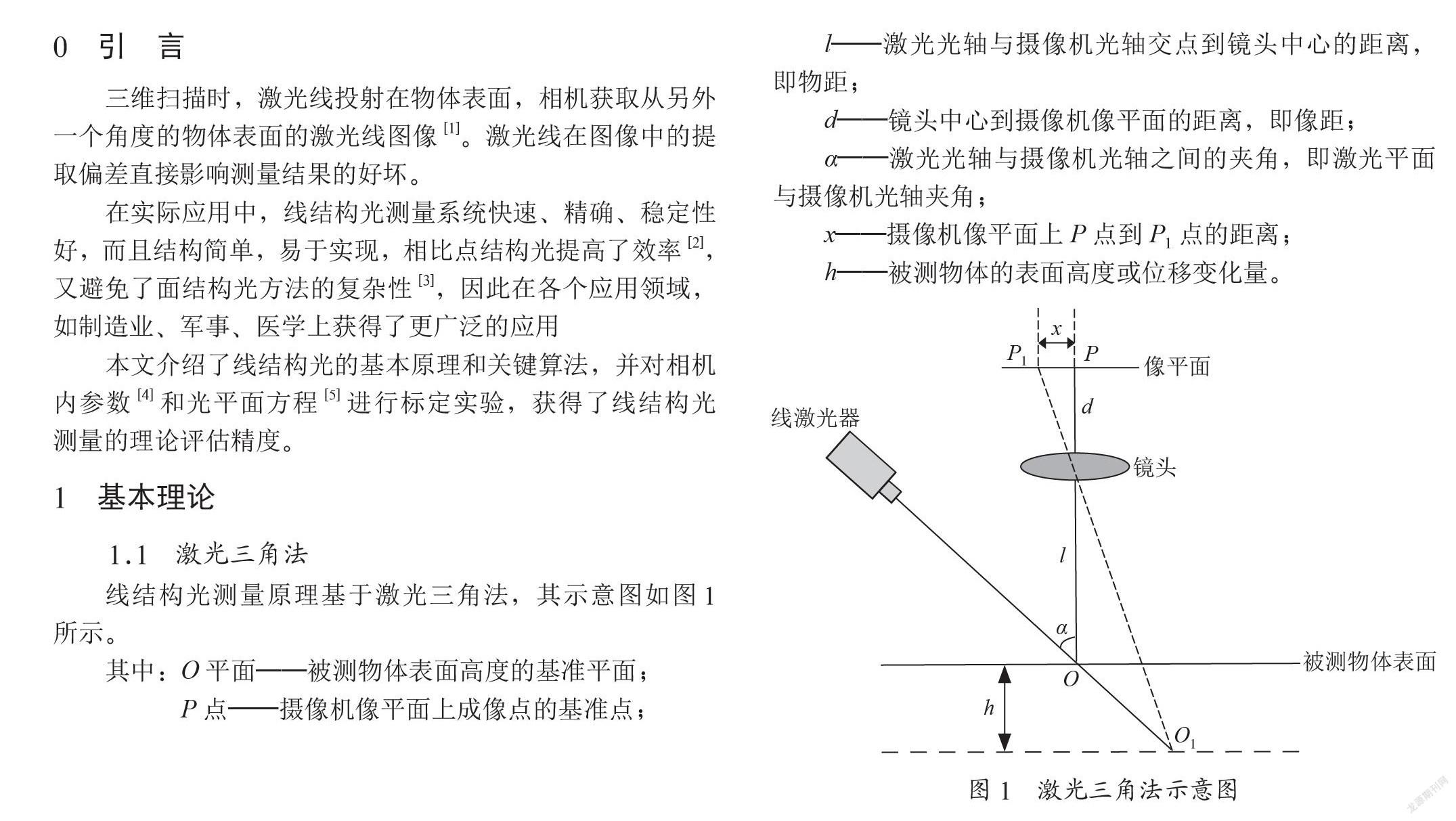
1.1 激光三角法
1.2 关键算法
线结构光测量原理示意图如图2所示。
由图2可知,光平面与被测物体的相交点在摄像机坐标系下的三维坐标,可根据摄像机坐标系下的光平面和相机光轴射线相交计算得到。该计算过程中的关键步骤为:相机内参数标定、光平面方程标定、激光条纹中心提取。
根据现有的技术积累,本线结构光测量系统依次采用:(1)张正友相机标定算法[6];(2)基于自由移动平面靶标的标定方法[7];(3)Steger算法,完成相机内参数标定、光平面方程标定和光条中心提取。
2 相机内参数和光平面标定实验
2.1 相机性能参数
本系统所用相机为凯视佳公司的JELLY3系列工业相机,具体参数如表1所示。
此外,经测试该相机视野大小为:15mm*11mm,景深大小为1mm左右。
2.2 相机内参数标定实验
由于本系统所用相机的视野范围和景深均较小,故给相机内参标定造成较大困扰。因为一般在进行标定时需要尽可能让标定靶在纵深方向上变化,而受相机的视野和景深限制,为了在保证视野清晰的同时又能确保标定靶上格点数满足一定数量要求,必须使标定靶的尺寸较小。从目前市面上的各种标定靶来看,考虑选择光刻标定板。根据目前相机内参数标定情况来看,欲保证本款凯视佳MU3C120M型号相机能够精确标定,其所需的标定靶的规格参数应满足如下要求:格點数为15*13,方格尺寸为0.5mm的光刻标定靶。
受现有条件限制,目前只有一块格点数为50*50,方格尺寸为1mm的光刻标定板可供使用,故先使用该标定板进行测试。通过对该标定板进行一定处理,分别进行了两组相机内参标定实验。
(1)实验一:选取格点数为9*11的标定靶(如图3所示),连续进行了两次标定实验,其标定结果如表2所示。
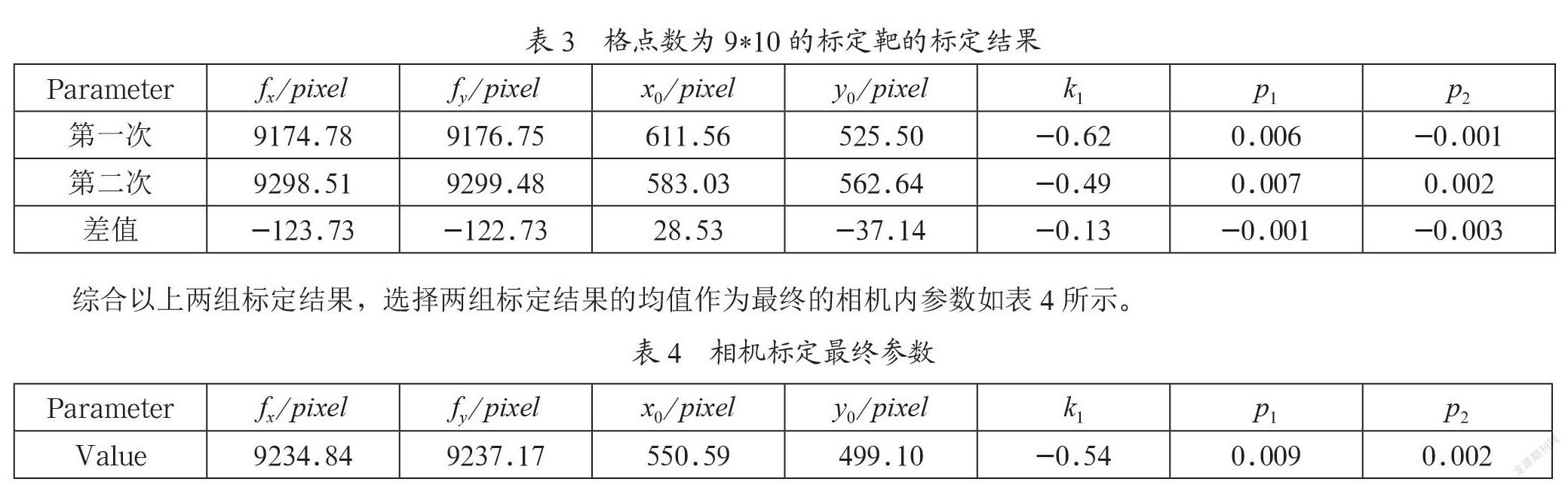
(2)实验二:选取格点数为9*10的标定靶,连续进行了两次标定实验,每次实验拍摄40幅图片,其标定结果如表3所示。
对比表2和表3中的结果可知,实验一的标定结果的重复性比实验二更好,其原因可能是实验一中标定靶的格点数更多,且拍摄的图片清晰度更佳。需要指出的是,实验二中拍摄到的其实是从标定靶背面观测到的反射面,主要是为下一步标定激光平面做铺垫。从以上两组相机标定实验的结果来看,相机内参标定结果还不稳定,存在一定波动。考虑更换一个尺寸更小的标定板进行测试。
综合以上两组标定结果,选择两组标定结果的均值作为最终的相机内参数如表4所示。
2.3 激光平面标定实验
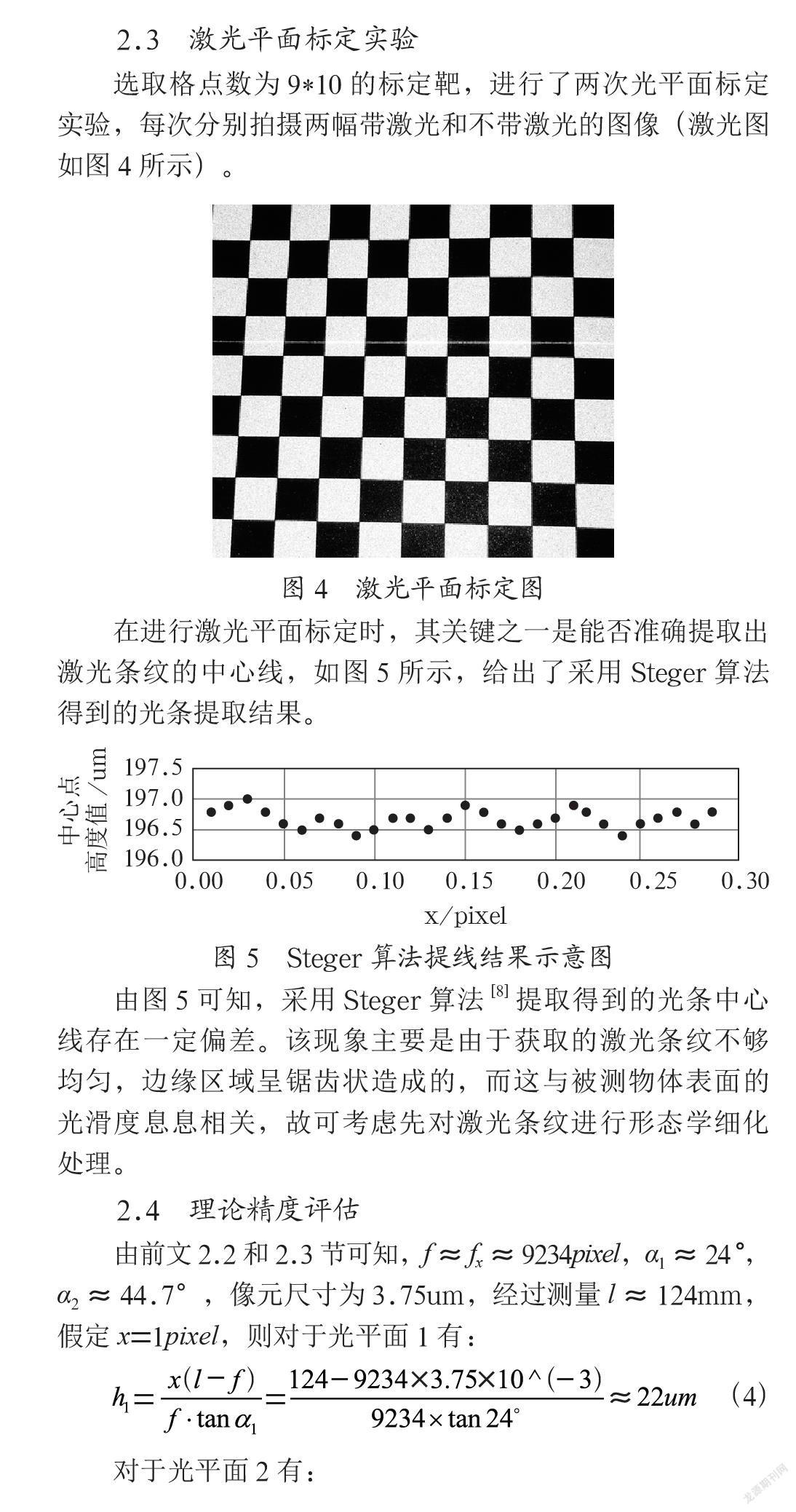
选取格点数为9*10的标定靶,进行了两次光平面标定实验,每次分别拍摄两幅带激光和不带激光的图像(激光图如图4所示)。
在进行激光平面标定时,其关键之一是能否准确提取出激光条纹的中心线,如图5所示,给出了采用Steger算法得到的光条提取结果。
由图5可知,采用Steger算法[8]提取得到的光条中心线存在一定偏差。该现象主要是由于获取的激光条纹不够均匀,边缘区域呈锯齿状造成的,而這与被测物体表面的光滑度息息相关,故可考虑先对激光条纹进行形态学细化处理。
2.4 理论精度评估
由前文2.2和2.3节可知,f≈fx≈9234pixel,α1≈24,α2≈44.7°,像元尺寸为3.75um,经过测量l≈124mm,假定x=1pixel,则对于光平面1有:
由式(1)和(2)可知,当被测物体在纵深方向移动100um时,其对应的激光条纹1和2在像面上的位置将分别变化4.5pixel和10pixel左右,且激光条纹2上的像素点变化大小为激光条纹1变化大小的2倍左右。
此外,从理论上来说,若x的取值为0.1pixel,则激光线1和激光线2的测量精度分别可达到2um和1um。值得一提的是,此理论精度是在上述给定焦距f和α角下得到的,由于目前相机内参数和光平面标定仍存在一定误差,故该测量精度会出现一定波动。
3 结 论
本文首先分析了线结构光的基本原理和关键算法,依次采用张正友相机标定算法、基于自由移动平面靶标的标定方法进行实验,并通过相机内参数标定实验和激光平面标定实验进行验证,最后推导出线结构光测量的理论精度,能有效确定线结构光测量误差。
参考文献:
[1] 洪梓铭,艾青松,陈昆.基于光纤激光的高精度三维视觉测量技术 [J].红外与激光工程,2018,47(8):89-96.
[2] 贾鹏霄,汪沛,周越,等.一种基于直线基元的手眼系统结构光标定方法 [J].光子学报,2018,47(1):194-201.
[3] 杨海清,王洋洋.基于面结构光几何关系的三维数字化研究 [J].计算机应用研究,2018,35(7):2237-2240.
[4] 刘力双,吕勇,孟浩,等.六自由度测量方法中相机参数对测量精度的影响研究 [J].激光杂志,2018,39(1):89-92.
[5] 马静宜.光幕阵列光幕平面方程精确标定技术 [D].西安:西安工业大学,2018.
[6] 靳冲,张建勋,廖宁.传统相机标定算法综述 [J].科学咨询(科技·管理),2018(1):38-39.
[7] 杨凯,余厚云,杨超.基于自由靶标的线结构光视觉测量系统标定研究 [J].机电工程,2016,33(9):1066-1070.
[8] 南方,李大华,高强,等.改进Steger算法的自适应光条纹中心提取 [J].激光杂志,2018,39(1):85-88.
作者简介:陈状(1996.05-),男,汉族,安徽宿州人,硕士研究生,研究方向:电子与通信工程。