纯电动汽车起步过程转矩优化研究
2019-09-10马秋香
马秋香








摘 要:为了提升纯电动汽车起步过程的加速性能,提出了一种基于模糊控制的起步控制策略,对纯电动汽车起步加速过程进行转矩优化。首先对驾驶员的起步意图进行模糊识别,通过将起步模式划分为一般起步模式,快速起步模式和紧急起步模式来反映驾驶员的起步意图。然后根据起步意图的识别结果,在不同的起步模式下采用不同的电机转矩负荷曲线,使电机的输出转矩更符合驾驶员的起步要求。基于Matlab/simulink建立纯电动汽车仿真模型,对纯电动汽车加速过程的冲击度、电机输出转矩和速度进行分析。仿真结果表明,所研究的控制策略在满足驾驶员起步意图和车辆起步平顺性的基础上提高了车辆的起步加速性能。
关键字:起步过程;模糊控制;转矩优化
中图分类号:U461 文献标志码:A 文章编号:
Research on torque optimization of starting process of pure electric vehicle
Abstract: In order to improve the acceleration performance of the starting process of pure electric vehicles, a starting control strategy based on fuzzy control is proposed to optimize the torque of the starting acceleration process of pure electric vehicles. First, the driver's starting intention is fuzzy identified, and the starting mode is divided into a general starting mode, a fast starting mode and an emergency starting mode o reflect the starting intention of drivers. Then according to the recognition result of the starting intention, different motor torque load curves are used in different starting modes, so that the output torque of the motor is more consistent with the driver's starting requirements. Based on Matlab/simulink, a pure electric vehicle simulation model is established to analyze the impact degree, motor output torque and speed of the pure electric vehicle acceleration process. Simulation results show that the control strategy studied in this paper can improve the vehicle's starting acceleration performance on the basis of satisfying the driver's starting intention and the vehicle's starting smoothness.
Key words: starting process; fuzzy control; torque optimization
引言
隨着时代的发展和进步,环境污染问题日益严重,环保成为一个备受关注的问题,因此能够减少尾气排放和提高新能源效率的新能源汽车成为重点发展方向[1]。整车控制器是纯电动汽车研究的重点,控制纯电动汽车平稳起步是整车控制器的重要功能之一,设计合理的起步控制策略对于整车控制器的完善和车辆的性能都具有重要意义。文献[2]采用车速与电流双闭环控制策略,建立了起步加速过程的纯电动汽车的动态数学模型,使纯电动汽车的行驶状态更加符合驾驶员的驾驶习惯。文献[3]将纯电动汽车的起步分为无油门起步和有油门起步2种模式,该控制策略满足了纯电动汽车在起步时的平顺性和安全性的要求。文献[4-5]都采用了驱动电机和制动器协调配合的自适应起步控制方法,使车辆在不同坡度上起步冲击度小、不溜车,具有较好的坡道自适应能力。以上文献所提出的纯电动汽车起步过程控制策略对驾驶员的起步意图考虑较少,为充分考虑驾驶员的起步意图,本文提出了基于起步意图识别的纯电动汽车起步控制策略。
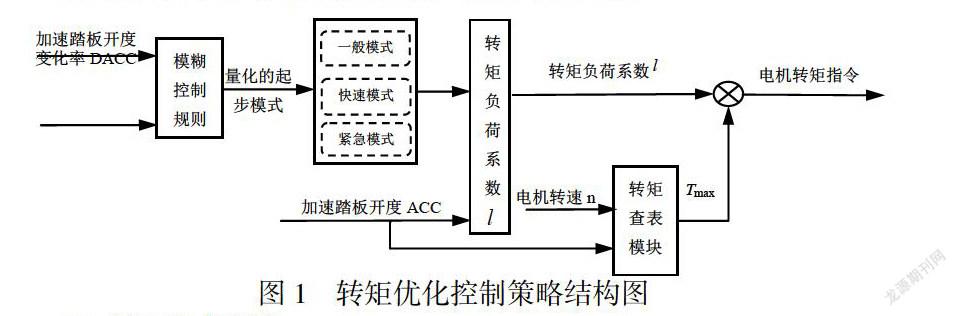
本文所提出的控制策略,通过将车辆的起步模式划分为一般起步模式、快速起步模式和紧急起步模式来反映驾驶员的起步意图。驾驶员起步意图的识别采用模糊控制算法,建立以电池SOC和加速踏板开度变化率为输入变量,以起步模式为输出的模糊控制器。设计出各起步模式下的电机转矩负荷系数曲线,然后根据起步意图识别的起步模式与加速踏板的开度确定电机的转矩负荷系数,进而计算出电机输出转矩。最终整车控制器将转矩命令发送给电机系统,电机的输出转矩通过传动系统传送给车轮,车辆完成起步。
1纯电动汽车起步过程转矩分析
纯电动汽车在起步过程中,是通过电机输出转矩来获得驱动力,通过克服作用于汽车的各种外力实现车辆的起步[6-7]。纯电动汽车的行驶方程式为
式中,为电机输出转矩,为主减速器传动比,为传动系统机械效率,为车轮半径,为车辆总重力,为滚动阻力系数,为坡度角,为空气阻力系数,为迎风面积,为车辆速度,为汽车旋转质量换算系数,为车辆总质量,为车辆行驶加速度。
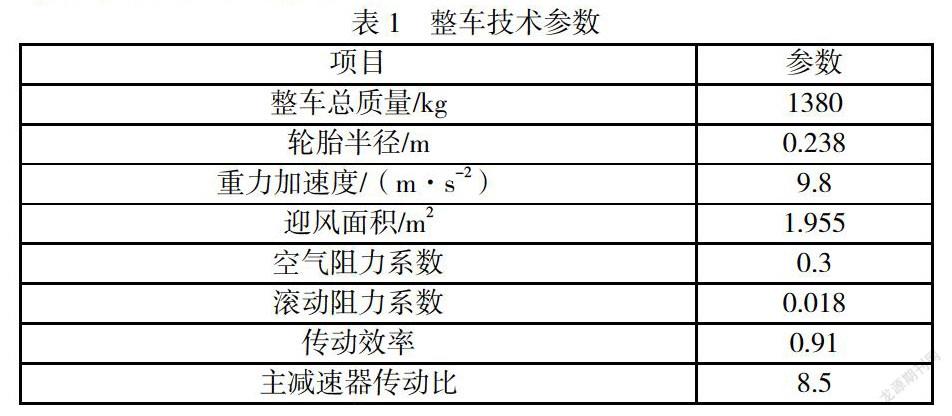
纯电动汽车的动力全部由电机提供,因此控制电机输出合理的转矩是实现纯电动汽车平稳起步、加速性能良好的关键。本文所研究的纯电动汽车的部分技术参数如表1所示。
2纯电动汽车起步过程转矩优化策略
传统的纯电动汽车起步控制策略仅考虑了加速踏板行程的变化,控制策略采用线性转矩输出,驾驶员的起步意图得不到体现。
为解决上述问题,本文将纯电动汽车的起步模式设置为一般起步模式、快速起步模式和紧急起步模式,各起步模式对应不同的电机转矩负荷系数曲线。转矩负荷系数是加速踏板开度的函数,其表达式如下:
不同的起步模式可以使驾驶员的起步意图得到更好的体现。通过模糊控制算法来确定起步模式,在此基础上计算出电机的输出转矩,然后将转矩命令发送给电机系统,转矩通过传动系统作用到车轮上,完成车辆起步。其中电机的输出转矩是转矩负荷系数和电机当前转速下最大输出转矩的函数,其表达式如下:
纯电动汽车起步过程转矩优化策略如图1所示。
2.1 起步模式识别
驾驶员的驾驶意图主要通过踩踏加速踏板来实现,但是车辆本身的状态也会影响车辆的性能,因此在起步意图识别时主要考虑加速踏板和车辆的状态。车辆加速踏板开度和加速踏板开度的变化率可以直观的反映驾驶员的起步意图,加速踏板开度代表车辆起步之后驾驶员期望的稳定车速,加速踏板开度的变化率的大小在一定程度上反映了驾驶员对于起步要求的快慢。当驾驶员踩踏加速踏板的速度比较快时,代表驾驶员想要快速起步,电机应该输出一个较大的转矩;当驾驶员踩踏加速踏板的速度较慢时,代表驾驶员想要平稳起步,电机输出一个合适的转矩。驾驶员在通过一系列操作来表达驾驶意图时,为了车辆能要一个更好的起步加速过程,车辆状态的分析也至关重要。电池SOC较大时,电池的持续输出性能较好,优先考虑快速起步,使驾驶员的起步意图得到体现;在电池SOC较小时,优先考虑平稳起步,降低电池的能耗,延长整车的续航。
在车辆起步的过程中,驾驶员对汽车的操作是一系列的感性集合,因此起步模式的识别难以用准确的数学模型来表述。引入具有较强鲁棒性的模糊推理[8],利用模糊控制来判断驾驶员的起步意图。
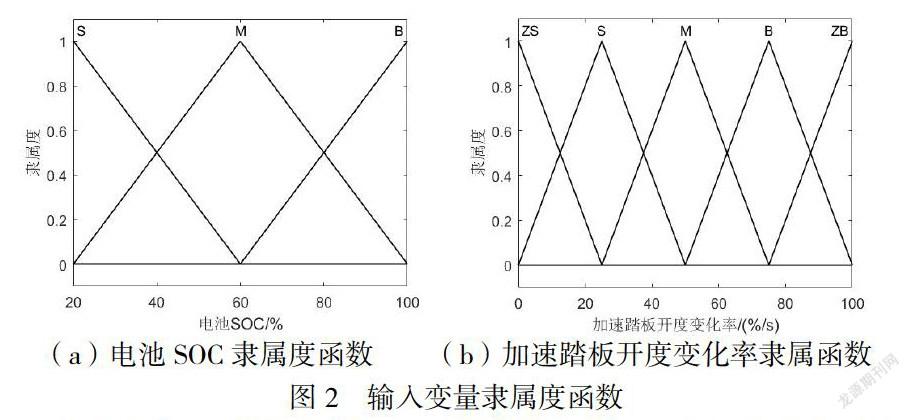
以加速踏板开度的变化率和电池的为输入变量,起步模式為输出变量建立模糊控制器。车辆的起步过程是一个加速的过程,因此将加速踏板开度变化率的模糊集论域定义为[0 100],其语言变量设置为:{极小ZS,小S,中M,大B,极大ZB}。电池的过小时会使车辆进入跛行模式,因此将电池的模糊集论域定义为[20 100],其语言变量设置为{小S,中M,大B}。起步模式n的论域设置为[1,3],其语言变量设置为{一般起步模式S,快速起步模式M,紧急起步模式B}。选择三角函数作为输入变量的隶属度函数,如图2所示。输出变量的隶属度函数采用固定值,S对应1,M对应2,B对应3。
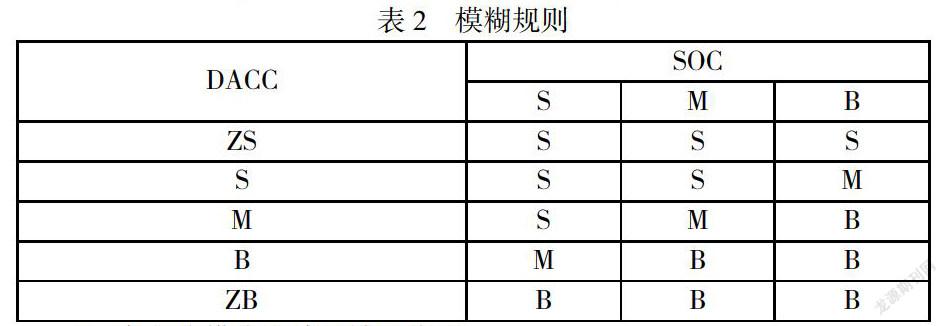
在所选输入变量的基础上,总结驾驶员在纯电动汽车起步时的经验,模糊控制规则采用的形式,制定如表2所示的15条模糊规则。输入变量首先经过模糊化处理,然后再经过模糊规则的模糊推理,最终通过解模糊得到精确的输出变量。
2.2各起步模式设计及转矩分配
2.2.1 紧急起步模式设计
在紧急起步模式下,为了满足急加速起步的要求,整车的动力响应要迅速,加速踏板开度与电机转矩负荷系数的对应关系应是硬踏板控制方式[9]。
纯电动汽车的动力性主要体现在爬坡性能上面。拟定紧急起步模式下纯电动汽车以30 km·h-1车速爬坡,最大爬坡度是30%,可以得到不同爬坡度所需的电机功率和转矩[10],如表3所示。
定义车辆的加速踏板开度与车辆爬坡度的关系如表4所示。
利用公式(3),可以求出不同爬坡度下电机转矩负荷系数,综合表3和表4可以得出加速踏板开度与转矩负荷系数的关系,如表5所示。
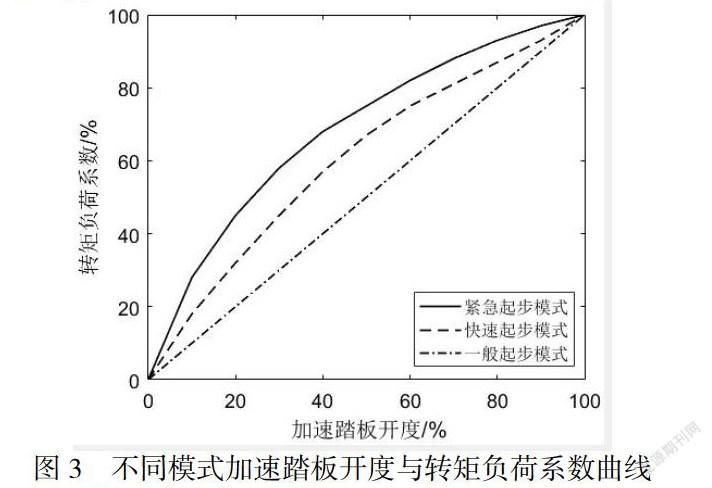
通过数据拟合,可以得到加速踏板开度与转负荷系数的关系曲线,如图3中紧急起步模式的转矩负荷系数曲线。
2.2.2 快速起步模式设计
在快速起步模式下,整车的动力性相比紧急起步模式要差一些,减小整车的冲击度,但是比一般起步模式下的动力性能要好。拟定快速起步模式下纯电动汽车以30 km·h-1的车速爬坡,设定最大爬坡度为20%,可以得到不同爬坡度所需的电机功率和转矩如表6所示。
定义车辆的加速踏板开度与车辆爬坡度的关系如表7所示。
利用公式(3),可以求出不同爬坡度下电机转矩负荷系数,综合表6和表7可以得出加速踏板开度与转矩负荷系数的关系,如表8所示。
通过数据拟合,可以得到加速踏板开度与转负荷系数的关系曲线,如图3中快速起步模式的转矩负荷系数曲线。
2.2.1 一般起步模式设计
在一般起步模式下,采用传统的线性策略,如图3中一般起步模式的转矩负荷系数曲线。
3 控制策略仿真验证
在Matlab/simulink软件中搭建整车仿真模型,该模型包括加速踏板模型、整车控制器模型、电机模型、电池模型、传动系模型和整车动力学模型,对控制策略进行仿真。
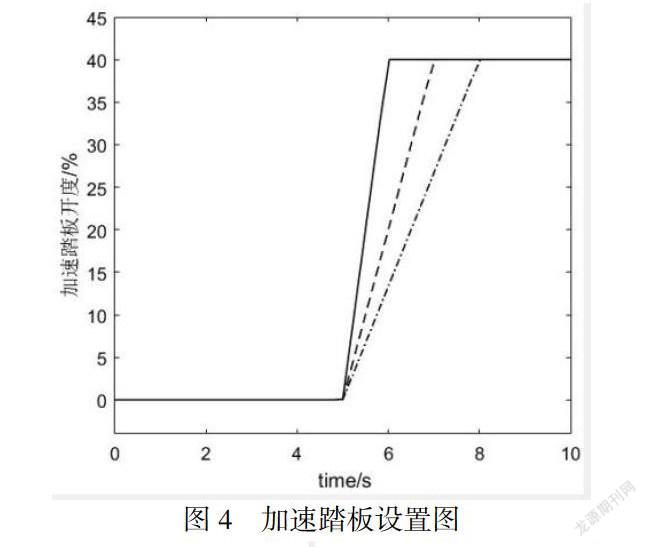
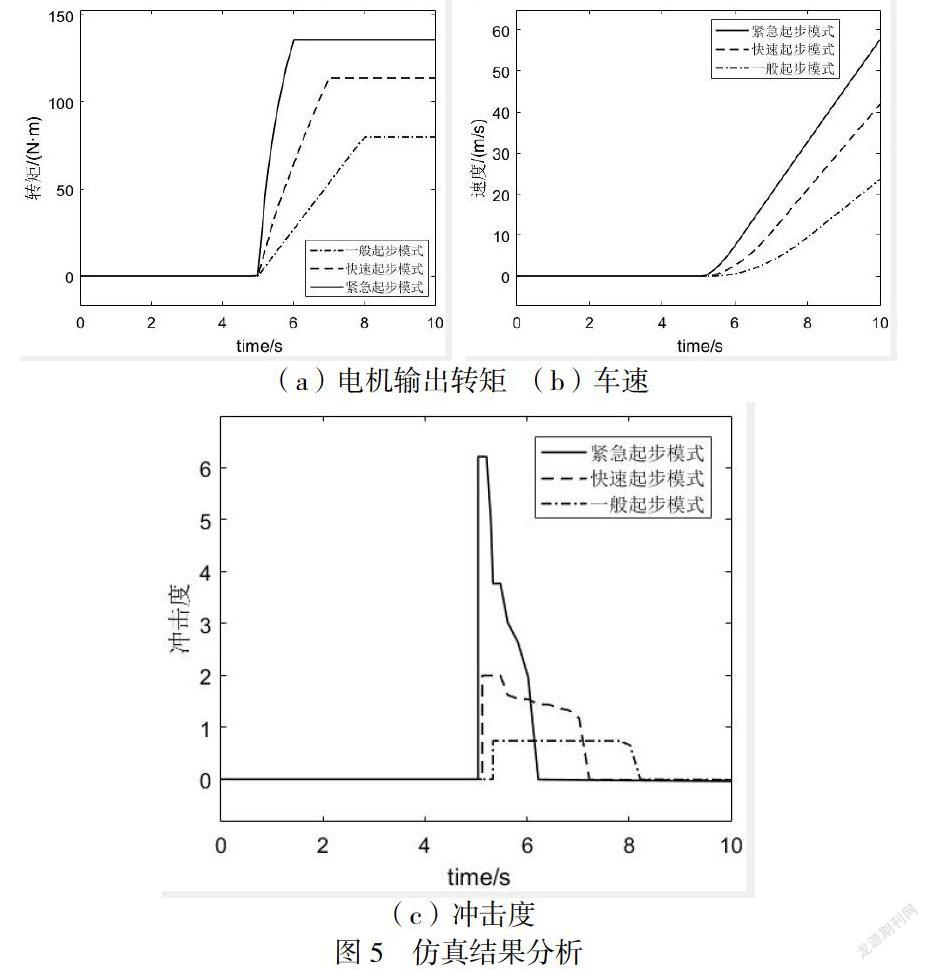
将电池的SOC设置为80%,然后设置不同的加速踏板来对控制策略进行验证,对仿真结果中的车速、电机输出转矩和冲击度进行分析判断控制策略的可行性。加速踏板的设置如图4所示,三种情况分别是5-6s、5-7s、5-8s内加速踏板开度从0增至40%。仿真结果如图5所示。
由图5(a)(b)可以看出,紧急起步模式和快速起步模式转矩的输出相比一般起步模式更大,更大的输出转矩会满足驾驶员的快速起步要求;在车速方面,紧急起步模式和快速起步模式都能在较短的时间里完成起步并提速。由图5(c)可以看出,三种起步模式都滿足冲击度的要求。
4 结语
本研究运用模式控制算法对驾驶员的起步意图进行识别,依据驾驶员的起步意图确定电机转矩负荷系数,最终确定电机输出转矩。仿真结果表明,控制策略能够较好的识别驾驶员的起步意图,优化了起步时的转矩输出,使汽车的起步加速性能大幅改善,并且能够满足汽车的平顺性要求。为车辆的起步控制策略提供了一种有效的方法,对将来车辆的开发具有借鉴意义。
【参考文献】
[1]黄志.新能源汽车技术发展现状分析及其趋势[J].汽车实用技术,2018,44(11):19-20.
[2]汪贵平,马建,杨盼盼,等.电动汽车起步加速过程的动力学建模与仿真[J].长安大学学报(自然科学版),2009,29(06):98-102.
[3]胡建军,杜瑞,吉毅.纯电动汽车起步控制策略[J].重庆大学学报,2013,36(08):19-25.
[4]吴兵显,周萍.基于纯电动汽车的坡道起步控制策略研究[J].农业装备与车辆工程,2019,57(05):37-40.
[5]秦大同,陈淑江,胡明辉,等,周孟喜.纯电动汽车电机与制动器协调起步控制[J].中国机械工程,2012,23(14):1758-1763.
[6]余志生.汽车理论[M].北京:机械工业出版社 , 2015.
[7]胡骅,宋慧.电动汽车[M].北京:人民交通出版社,2012.
[8]Datta M,Senjyu T.Fuzzy Control of Distributed PV Invert-
ers/Energy Storage Systems/Electric Vehicles for Frequency Regulation in a Large Power System[J].IEEE Transactions on Smart Grid. 2013, 4 (1):479- 488.
[9] 熊会元,何山,查鸿山,等.双轴驱动纯电动汽车驱动转矩的分配控制策略[J].华南理工大学学报(自然科学版),2018,46(11):117-124.
[10] 郭温文.纯电动客车整车控制系统设计及控制策略研究[D].长春:吉林大学,2011.