船载系留式多旋翼无人机总体设计与使用研究
2019-09-10王雷计世勋
王雷 计世勋

设计了一种用于船载使用的系留式多旋翼无人机系统,对总体参数优化、系留缆、地面一体机、定点跟随等关键技术难点进行了分析,区分任务前检查、设备部署展开、无人机起降三个阶段梳理了系统使用流程。
多旋翼无人机是一种具有自动垂直起降、超低空巡航、空中定点悬停和绕点飞行等功能特点的新型无人飞行器。系留式多旋翼无人机区别于自由飞式机型,它采用系留线缆给飞行平台源源不断提供电能,可实现无人机长时间滞空。系留缆为光电复合线缆,内部有单根或者多根单模光纤,可实现私密高速数据传输以及更安全的无人机控制数据链路。基于其续航时间长、保密性能好等特点,将其加装于船载动平台上,将可实现长时间视频监控或无线组网等功能。
系统工作原理
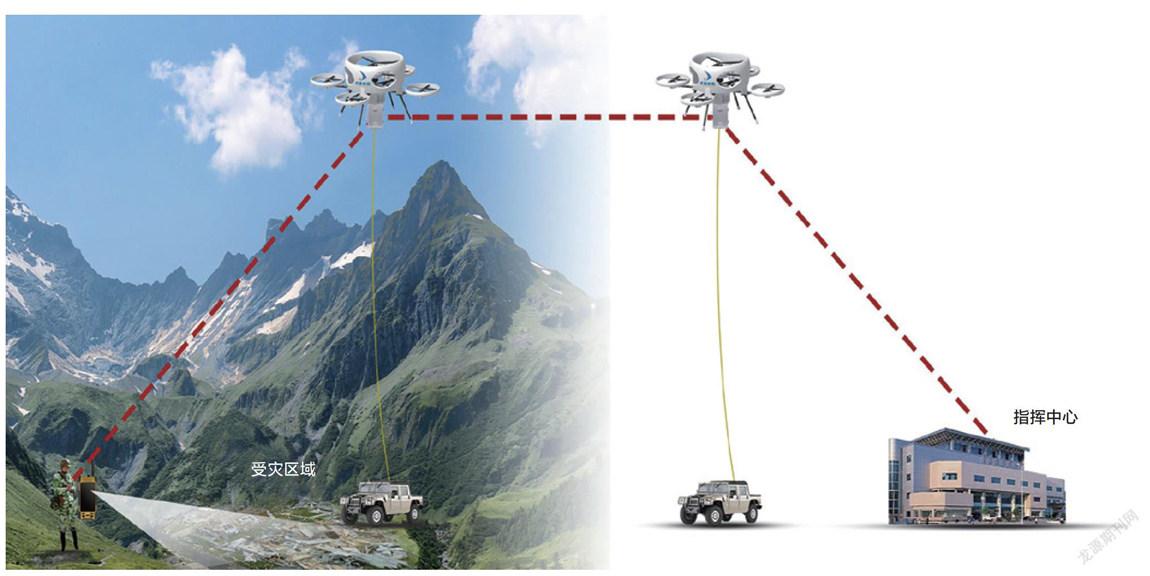
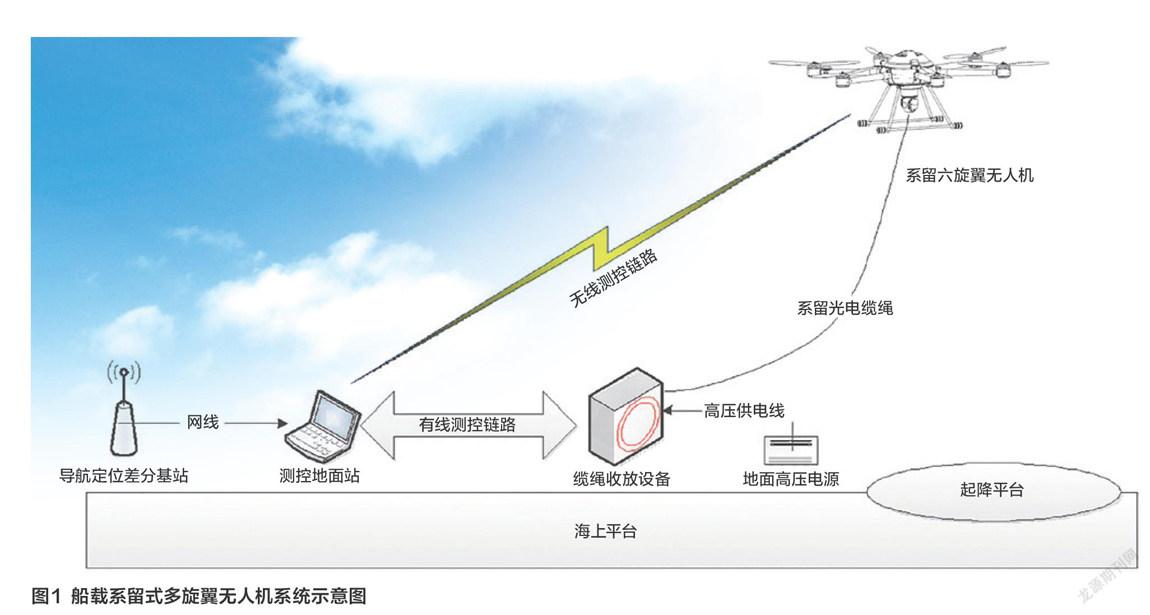
船载系留观测平台利用系留无人机挂载摄像吊舱,应用监视测量技术,在通信链路上传输摄录到的图像。无人机可实现自主起降,自动收放线,地面供电系统可对无人机进行长时间供电,保证任务的执行。系统由多旋翼无人机、缆绳收放设备、地面高压电源、测控地面站、导航定位差分基站和附属配套设备等组成,如图1所示。
根据需要,可以在系留无人机上搭载不同的光电监测设备(如光电吊舱、倾斜相机、雷达等)。舰船装载系留无人机系统到达作业地点后,操作人员控制其起飞并进行作业。从空中对海面目标进行监视、探测,并将得到的监测信息通过光纤信道经由动中通设备传输到远端指挥中心,实现视频、数据和控制指令的双向交互,做到指挥中心与现场的“零距离”管理和指挥。
关键技术分析
总体参数优化
飞行器的总体布局是实现飞行器性能指标和技术使用要求的重要环节,并为全机详细设计提供依据。系留型多旋翼的主要飞行科目为悬停和小速度前飞,因此在桨尖速度、桨盘实度等总体参数选择时,应以该状态的功率作为优化目标。当系留多旋翼伴随载体平台大速度跟随飞行时,气动阻力消耗功率约占总功率30% - 50%。从多旋翼构型分析,机身是构成阻力的主要部分,对其整流、减小结构过渡区的压差阻力、机身最大横截面。另外一个约束是操稳特性方面,应保证多旋翼飞行器具有一定的迎角稳定性、速度静稳定性和角速度阻尼等,并在飞行状态改变时,作用在多旋翼的力矩不产生突变,从旋翼与重心的位置、辅助旋翼与主旋翼的拉力分配关系方面,改善操纵响应。
系留缆设计
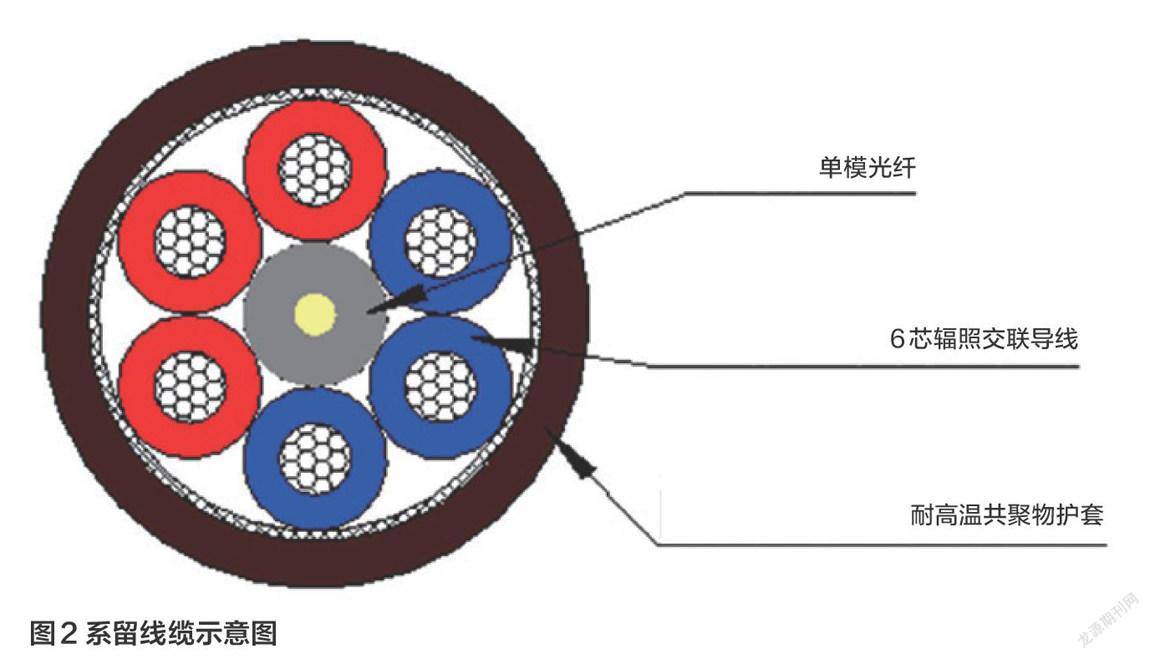
系留线缆采用1光6电复合缆设计,既负责电能的输送,同时也要通过其中的光纤传送信号,如图2所示。
系留缆应具有耐反复卷绕收放,工程化程度高;环境适应性好,耐盐雾、耐湿热、耐高低温、耐低气压、耐紫外,防雨水;传输电流大,可以光电混装;耐电压值高、绝缘电阻高;抗拉力大,柔软,适合反复收放、弯曲和拉伸等功能。
基于以上考虑,本系统采用轻型合金导体及航空线缆以减轻重量,设计耐压值可以抗5000V高压不被击穿;线缆绝缘材料使用机器人线缆的高温塑料,可以承受长时间的反复弯曲;该线缆的抗拉力由专用的超高强度纤维来承担,抗拉力大于50kg以上;可以通过额定14A的高压直流电;线缆内部包含抗微弯光纤,可提供优良的光传输性能,配合光电转换终端可提供高清视频、千兆网络等接口,可以传输高清视频及控制信号,抗干扰能力强。
地面一体机设计
地面一体机负责无人机起降时的线缆自动收放控制以及将发电机输送过来的交流电转化为高压直流电。其中箱内安装有系留线缆收放控制机构和地面电源模块,分别用于实现无人机起降时的线缆自动收放控制以及将发电机输送过来的交流电转化为高压直流电,如图3所示。
由于系留无人机系统需要根据无人机空中平台的状态自动收放系留线缆,因此专门设计了智能化的线缆收放控制机构,采用进口电机及进口传感器,保证系统的稳定性和控制精度。无人机起降时自动收放线,通过传感器精确测量线缆长度,并根据飞行高度自动控制收放线的速度,同时精确测量线缆拉力,根据无人机拉力自动调节力矩,保证线缆有一定张力。在无人机小范围晃动时,通过缓冲装置保证线缆的平滑收放控制,收线时自动排线,保证线缆均匀的缠绕在转轴上。
地面端AC/DC电源模块将发电机输出的交流电转化为稳定可靠的直流电,通过系留电缆输送到机载端,供无人机使用。采用220V交流电转化为400V直流电输电模式,进行输出过流及短路瞬时保护及故障隔离、输入过欠压瞬时保护及故障隔离、输出过压瞬时保护及故障隔离以及过温保护设计。
定点跟随设计
系留式多旋翼无人机在进行自主起降时,对回收箱的相对位置有较高要求,尤其在船上使用时,载体随风浪的摇摆和升降会使回收难度加大。利用载波相位差分技术,以地面设备的DGPS作为参考站,与机载DGPS做差分计算,通过无人机数据链交换差分校正数据,差分定位的结果分别送到自动驾驶仪和地面控制站,保证无人机平稳跟随及着陆。为提高系统的鲁棒性,还可以同时使用无线电高度表或激光高度表等,也可采用与其它传感器进行复合计算定位的方法。
系统使用流程研究
执行任务前检查
首先操作人员检查机载备用电池容量是否充足,然后检查机载设备的各连接插头,确保无松动情况,接下来将无人机与地面站连接,并通电测试,确保飞控系统工作正常,最后测试线缆收放机构是否正常工作。
设备部署展开
将系留无人机放置在相对水平的平面上,将折叠机臂展开并锁紧,将线缆插头与无人机上的插头连接并锁紧,启动发电机开始工作,开启地面站电源,啟动地面站操作软件。检查机体以及各部件的状态是否符合飞行条件,启动无人机电源,开启飞控系统,飞控启动自检程序,检查飞控系统与各机载设备之间连接是否正常,检查地面站与无人机飞控系统通讯是否正常,机载设备回传的各项参数指标是否正常,开启任务载荷电源,检查任务载荷工作是否正常。
无人机起降
可在地面站软件中设置无人机悬停高度,点击“起飞”按钮,无人机自动起飞,上升至对应高度后悬停。启动任务载荷开始工作,过程中观察地面站界面上显示的无人机各项参数是否正常。需要改变无人机悬停高度,则重新在地面站中输入高度值,无人机自动上升、下降来改变悬停高度;若想改变无人机航向,则重新在地面站中输入航向角值,无人机自动原地转向,调整机头指向期望航向。
任务执行完毕后,在地面站软件中点击“降落”按钮,无人机自动降落至起飞初始位置;通过遥控器锁定飞控系统,可根据需要再次起飞。降落时重复起飞前检查的所有项目,关闭任务载荷电源,关闭无人机电源,断开与地面电源的连接,关闭发电机,将无人机机臂折叠后放入航空收纳箱。
结束语
系留式多旋翼无人机在有人船上的应用,国内外研究及实践较多,其实施相对容易。而在无人船(艇)上的使用尚处于工程试验阶段,面临的技术问题也更为复杂,本系统设计对相关研究具有一定借鉴意义。
(参考文献:略。如有需要,请联系编辑部。)
