倾转四旋翼无人机直升机模式控制方法
2019-09-10孙立志
孙立志




随着无人机技术日趋先进,融合无人直升机和固定翼无人机优点的无人机型应运而生。其中,倾转四旋翼无人机兼具可垂直起降、载重量大及巡航速度高等特点的无,是极具发展潜力的新型无人机种。采用经典力学理论,对倾转四旋翼无人机进行了力学分析,建立了直升机模式下的模型,得出了其质心运动的动力学方程;确定了在直升机模式下的姿态和位置控制方法,设计了倾转四旋翼无人机各个控制回路的控制结构和控制律。
倾转四旋翼无人机具有可以倾转的旋翼,同时有水平固定机翼,因此在巡航速度、有效载荷上更加突出,在军事和商业方面具有广阔的应用前景,是未来无人无人机发展的一个重要方向。
倾转旋翼机的控制方式主要有两种,一种是直升机控制模式,另一种是固定翼无人机控制模式。其飞行过程如下,无人机首先在直升机模式下垂直起飞达到一定高度;接着进入过渡飞行阶段,短舱发生倾转,旋翼回转面由平行于机身纵轴逐渐倾转至垂直于机身纵轴,在该阶段,旋翼逐渐转换为提供推力,而升力则由固定翼提供;完成旋翼倾转后,无人机进入平飞模式,以固定翼模式巡航飞行。在垂直起降的过程中可以按照直升机控制方法来控制,通过改变旋翼的拉力矢量来改变飞行状态;在平飞阶段主要采用固定翼无人机控制模式,通过控制气动舵面的来控制飞行状态。
倾转四旋翼无人机力学模型
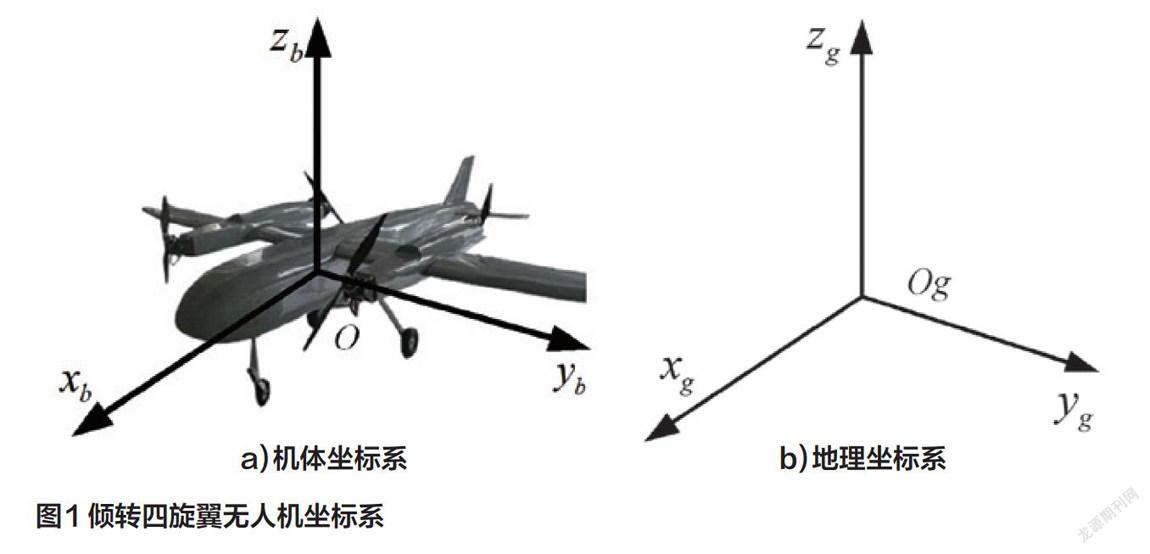
坐标轴系的定义
为便于对倾转四旋翼无人机进行力学分析,需要分别建立机体坐标系和地理坐标系如图1所示。
式中,θ为俯仰角,φ为横滚角,ψ为偏航角。
倾转四旋翼无人机直升机模式下的力学建模
利用经典力学对倾转四旋翼无人机进行力学分析,进行以下假设以简化分析:
(1)将倾转四旋翼无人机视为刚体,且质量是常数;
(2)假设地面为惯性参考系;
(3)忽略地球曲率,视地面为平面;
(4)假设重力加速度不随飞行高度变化而变化。
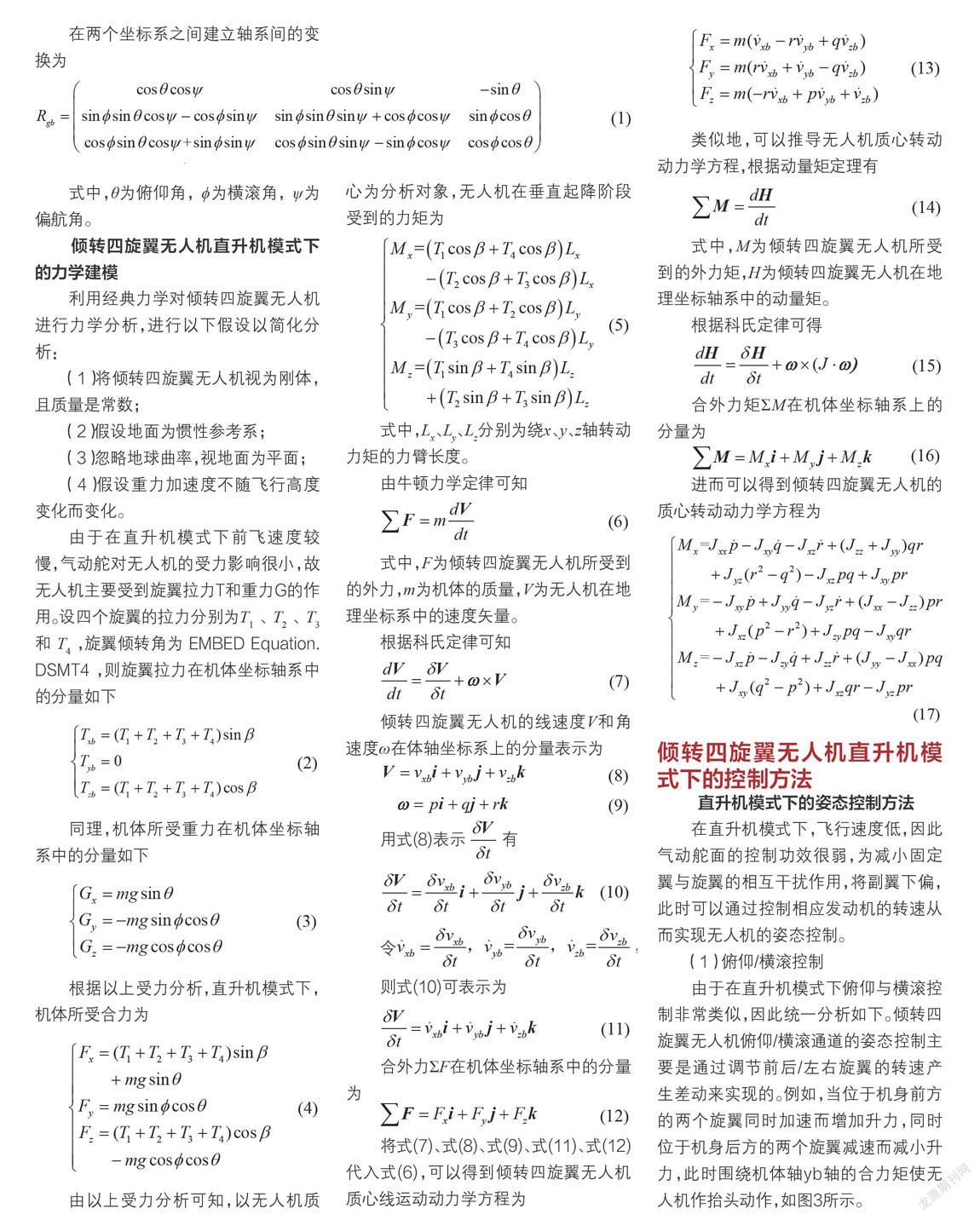
由于在直升机模式下前飞速度较慢,气动舵对无人机的受力影响很小,故无人机主要受到旋翼拉力T和重力G的作用。设四个旋翼的拉力分别为T1、T2、T3和T4,旋翼倾转角为EMBED Equation.DSMT4,则旋翼拉力在机体坐标轴系中的分量如下
倾转四旋翼无人机直升机模式下的控制方法
直升机模式下的姿态控制方法
在直升机模式下,飞行速度低,因此气动舵面的控制功效很弱,为减小固定翼与旋翼的相互干扰作用,将副翼下偏,此时可以通过控制相应发动机的转速从而实现无人机的姿态控制。
(1)俯仰/横滚控制
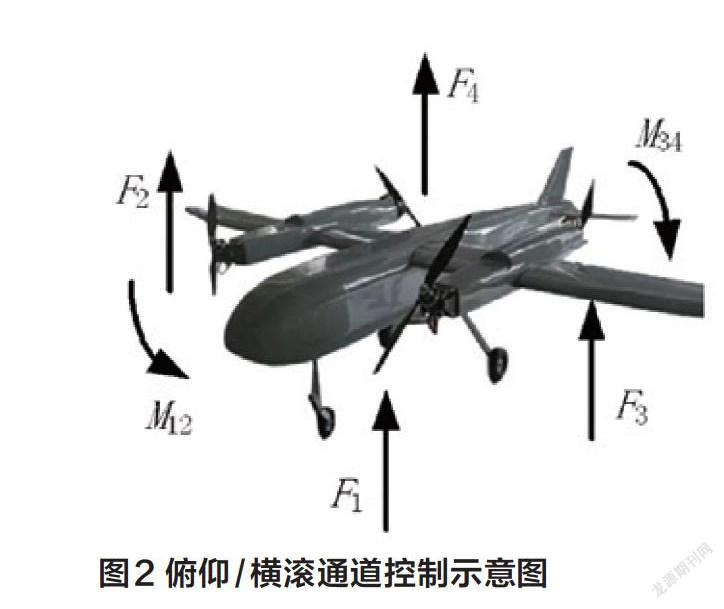
由于在直升机模式下俯仰与横滚控制非常类似,因此统一分析如下。倾转四旋翼无人机俯仰/横滚通道的姿态控制主要是通过调节前后/左右旋翼的转速产生差动来实现的。例如,当位于机身前方的两个旋翼同时加速而增加升力,同时位于机身后方的两个旋翼减速而减小升力,此时围绕机体轴yb轴的合力矩使无人机作抬头动作,如图3所示。
通过差动来实现无人机的俯仰和横滚控制,可以减小通道间的耦合,更加便于单独对每个通道进行设计。设计时认为无人机的俯仰角和横滚角都比较小,此时虽然通过前后/左右升力的差动产生相应转矩,但各个旋翼升力在重力方向上的分力之和变化很小,这就保证了无人机在姿态调整时不会明显影响到无人机的高度。
(2)偏航控制
直升机模式下的偏航控制是通过控制左右两侧舵机反向倾转,这样四个旋翼的水平分力会产生一个绕z轴的力矩,进而控制偏航姿态。左右两侧舵机反向倾转既增大了偏航力矩,又减小了偏航与横滚通道的耦合。同时可采用左右旋翼反向倾转,四个旋翼相对于z轴的转矩是同向的,这就增大了偏航姿态调节的转矩,加快了调节速度,如图3所示。
直升机模式下位置控制方法
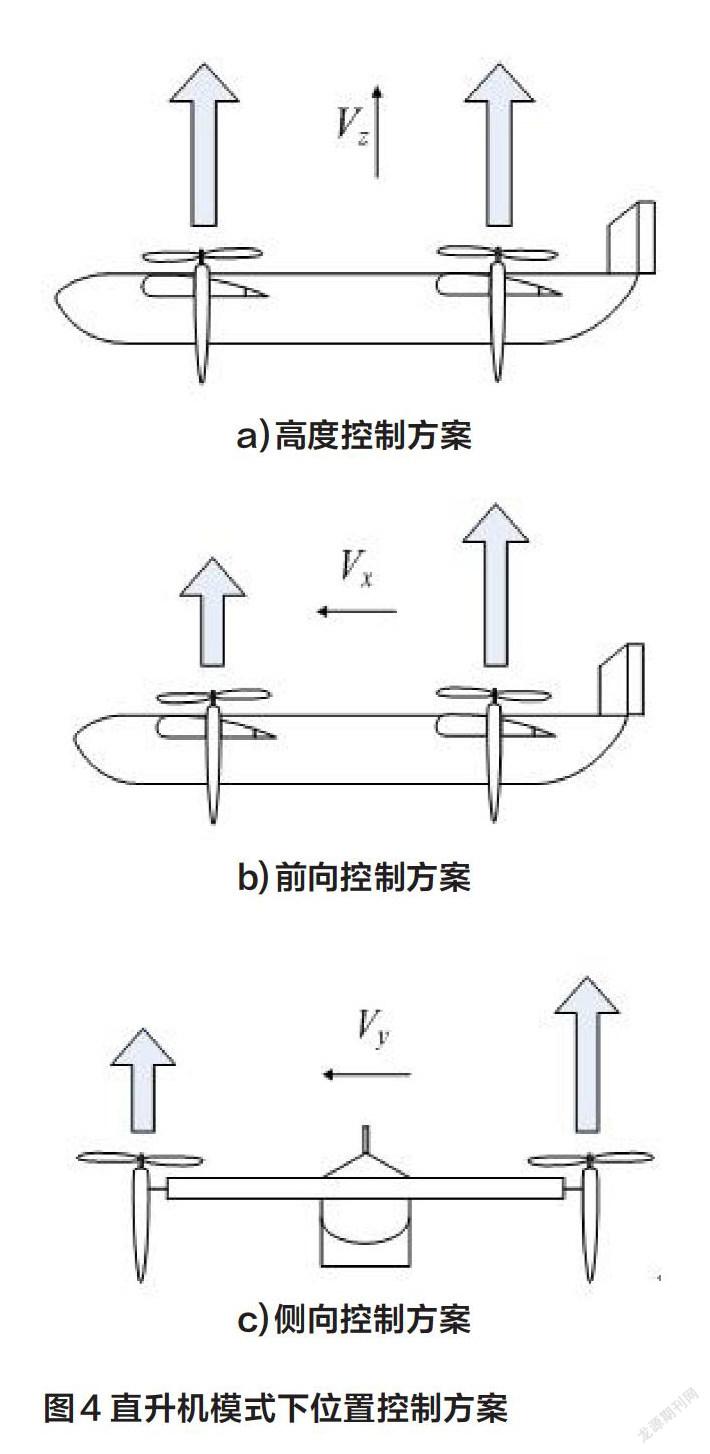
倾转四旋翼无人机融合了无人直升机和固定机翼无人机的优点,其中平飞时飞行速度较高,但在一些特殊场合需要低速和短程飞行,此时一般采用直升机模式飞行。在直升机模式下无人机在地理坐标系中的相对位置主要通过三种线运动来调节,分别为高度、前向和侧向运动。
(1)高度控制
无人机的高度控制是通过同时调节四个发动机转速来实现的。在某个平衡状态下,四个发动机同时加速时无人机所受升力大于重力,产生向上的加速度,此时无人机会向上爬升;减速时同理,通过控制无人机向上或下飞行达到控制高度的目的。
(2)前向/侧向控制
无人机要进行水平位置的调节就要有水平方向的合力产生相应的加速度,由于无人机在直升机模式下,且飞行速度较低,只能利用旋翼來产生相应的力,这就要求无人机产生一定的俯仰角/横滚角,此时旋翼的升力会在水平方向产生分力。
以前向控制为例,当无人机产生一定俯角时,旋翼的回转面也随之与水平面产生一定的夹角,使旋翼产生前向的分力,从而推动无人机向前运动;同理当无人机产生一定仰角时,会推动无人机向后运动,侧向运动与此类似,如图4所示。倾转四旋翼无人机直升机模式下的控制律设计
直升机模式下旋翼机的各部分开环传递函数可以线性化处理。假设一个时刻只进行一种操作,各通道近似解耦。根据以上对控制方法的分析可知,位置控制中的前向控制和侧向控制分别需要以俯仰角控制和横滚角控制为基础,所以在设计控制律时要先设计姿态控制,再将姿态控制作为位置控制的内回路对位置控制进行设计。
姿态控制律的设计
无人机姿态控制是通过控制力矩使机体转动达到相应的姿态角,必然有角加速度积分产生角速度和角速度积分产生角度的过程,所以控制系统的结构采用双闭环设计。内回路为角速率回路,外回路为角度回路。由双闭环控制系统设计经验,内回路带宽较宽,可以有效地抑制干扰,内环带宽要远大于外环带宽,一般的控制回路都需要校正,这里采用经典PID控制。
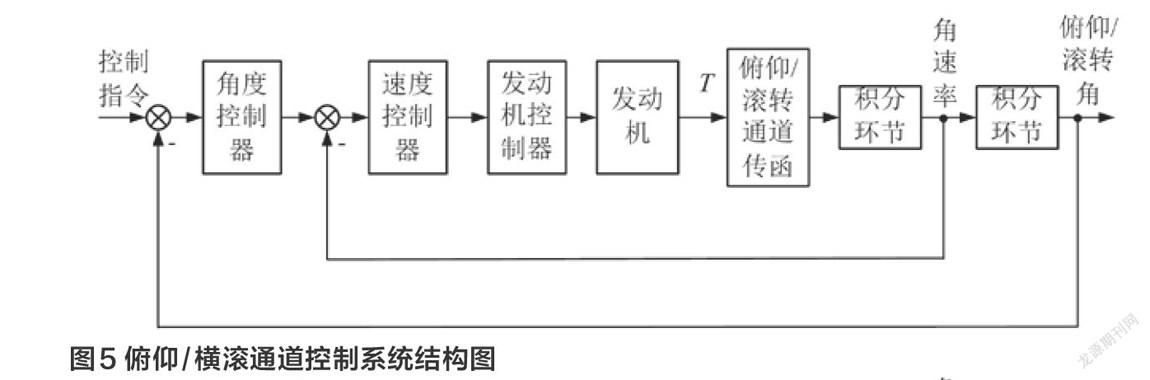
(1)俯仰/横滚通道控制律设计
俯仰/横滚通道控制系统结构如图5所示,控制指令经过两个控制器,控制发动机的转速,在不同转速下旋翼提供不同的升力,升力以旋翼气动中心到xb和yb轴距离作为力臂得到力矩,使机体旋转,输出量为角加速度,经过积分环节后转化为俯仰/横滚角度输出。
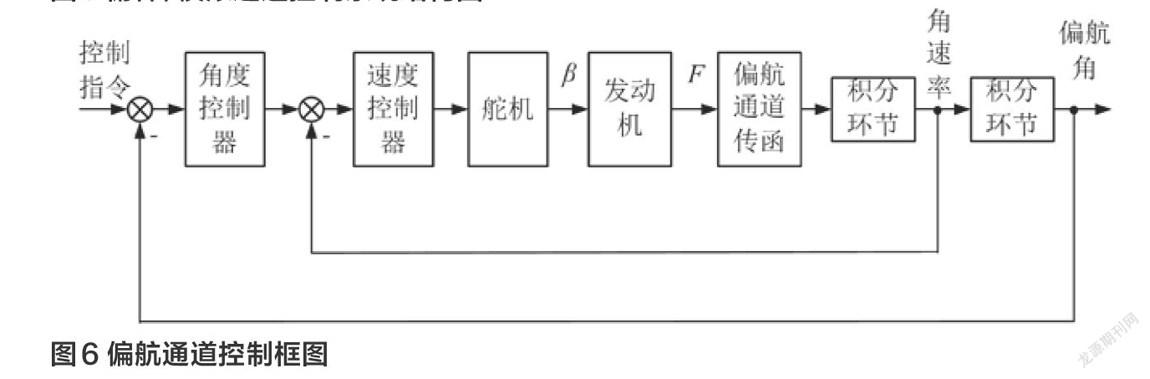
(2)偏航通道控制律设计
偏航角回路控制结构如图6所示,偏航角控制是通过控制左右两侧舵机反向倾转,此时旋翼的升力在水平方向的分力会产生一个绕机体坐标系z轴的力矩,从而改变偏航姿态角。假设某个旋翼拉力为F,相应舵机倾转角为β,则该升力在水平方向上的分力为Fsinβ,由于β变化范围较小,可以限制在精度允许的范围内,此时可以将旋翼拉力F在水平方向的分力做以下线性近似
Fsinβ≈Fβ
(18)
位置控制律的设计
相对于无人机的姿态控制,无人机的稳定性对其位置控制的要求比较低,允许存在比较大的超调和较长的调节时间,根据设计经验,水平位置控制的开环传函阶数较高,在校正时难以严格控制超调和调节时间,故在位置控制律的设计中均采用单闭环结构。
(1)高度控制
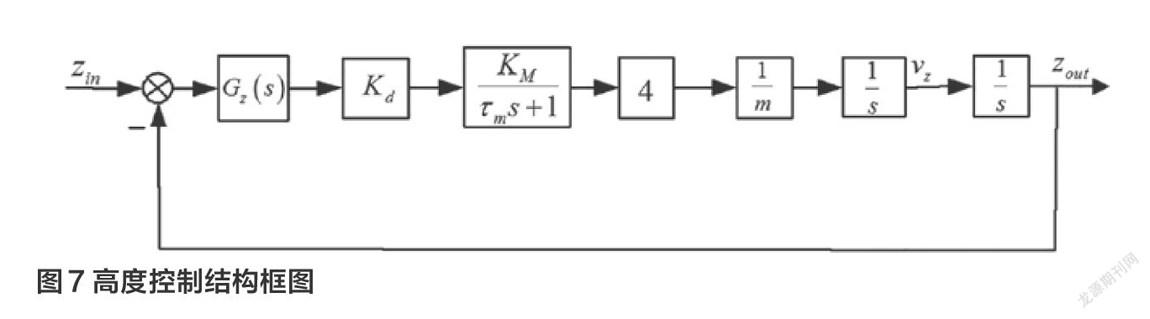
倾转四旋翼无人机是通过控制四个发动机同时加减速,从而改变高度方向的加速度来实现高度控制的。在直升机模式下机体所受空气阻力很小,旋翼拉力与垂直加速度的关系可以表示为
直升机模式下俯仰/横滚角很小或在调节高度前将俯仰,横滚角调节到很小,所以线性化后高度方向的加速度为az= 4F/m,可得高度控制=系统结构如图7所示。
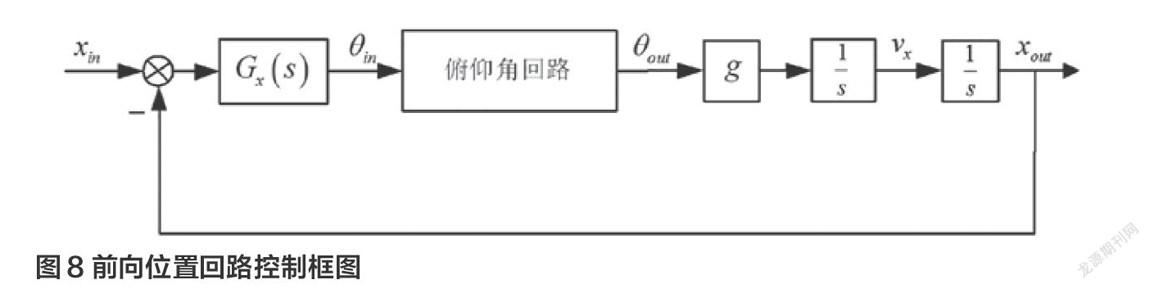
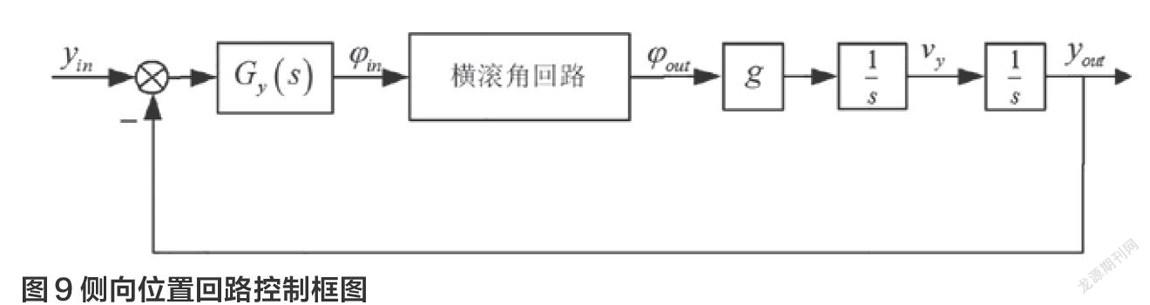
(2)水平位置控制
无人机的水平位置是通过前向位置和侧向位置来确定的,相当于一个二维平面,因此其控制包括前向位置和侧向位置两个回路。无人机要进行水平位置的调节就要有水平方向的合力产生相应的加速度,为了简化分析,不考虑各回路间的耦合。前向运动分析如下,假设無人机处于固定高度,并且横滚角为零,则无人机在纵向平面内的受力分析为
结论
本文主要对倾转四旋翼无人机在直升机模式下的控制方法进行了研究。通过对倾转四旋翼无人机进行数学建模,确定了倾转四旋翼无人机姿态控制方法和位置控制方法,并建立了倾转四旋翼无人机各个控制回路的结构框图,设计了相应回路的控制律,相关方法可为倾转四旋翼无人机的基础研究提供一定参考。
(参考文献:略。如有需要请联系编辑部)
