负载隔离式电动客车串联复合制动策略研究
2019-09-10辛亚飞张铁柱张洪信赵清海侯典平
辛亚飞 张铁柱 张洪信 赵清海 侯典平



摘要: 为提高电动客车的能量利用率并增加续驶里程,本文对负载隔离式电动客车串联复合制动策略进行研究。在Matlab/Simulink软件中搭建控制策略模型,嵌入AVL_CRUISE软件搭建的电动客车仿真模型进行联合仿真研究,对串联复合制动控制策略的制动能量回收效果进行分析,对控制策略的合理性和有效性进行验证。仿真结果表明,带串联复合制动策略的车辆续驶里程增加了51.51 km,百公里电耗减少了28.02 kWh,制动能量回收率达到25.58%,验证了串联复合制动控制策略的有效性。该研究为负载隔离式电动客车的研究和开发提供了理论基础,具有一定的实际应用价值。
关键词: 负载隔离; 电动客车; 控制策略; 制动能量回收; 串联; 制动法规
中图分类号: U461.3; TP273+.3 文献标识码: A
电动汽车技术与产业发展已成为缓解全球环境与能源危机的重要途径[1]。青岛大学提出了负载隔离式电动汽车的概念,利用储能电池存储和供给主要电能,动力电池辅助满足大功率及大电流的负载需求,采用自主产权的拓扑电路和控制策略,使发动机和储能电池免受车辆负载变化造成的冲击,保障发动机在最佳经济工作区域工作,增大制动能回收率,增加汽车续航里程[23]。为解决负载隔离式电动客车续驶里程短的问题,本文主要研究电动客车复合制动控制策略。在复合制动控制策略的研究中,张抗抗等人[4]提出串联制动控制策略,该策略较适用于后轮驱动的纯电动汽车;张俊智等人[5]针对混合动力城市客车提出了一种串联式制动能量回馈系统及对应的控制策略;赵治国等人[6]提出了一种基于制动防抱死系统(antilock brake system, ABS)液压制动与再生制动协调控制的电液复合制动控制策略,该策略有效提高了制动能量的回收效率;李国斐等人[7]提出了一种前后轮制动力分配的控制策略,充分利用电机的制动转矩,大幅提高了制动能量的回收;舒红等人[8]在欧洲经济委员会(Economic commission of Europe, EEC)制动法规的基础上,提出了一种能量管理策略。针对新能源汽车续驶里程短的问题,再生制动及控制策略在新能源汽车的研究中非常重要,但目前对负载隔离式电动客车再生制动方面的研究较少。基于此,本文主要对负载隔离式电动客车串联复合制動策略进行研究,采用Matlab/Simulink软件和AVL_CRUISE软件进行仿真分析。该研究为负载隔离式电动客车续驶里程的增加提供理论依据。
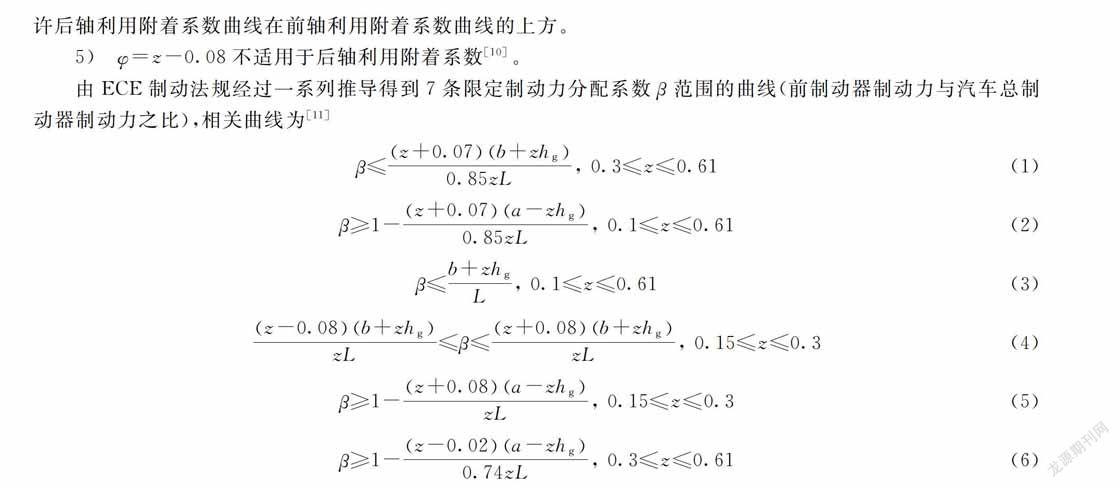
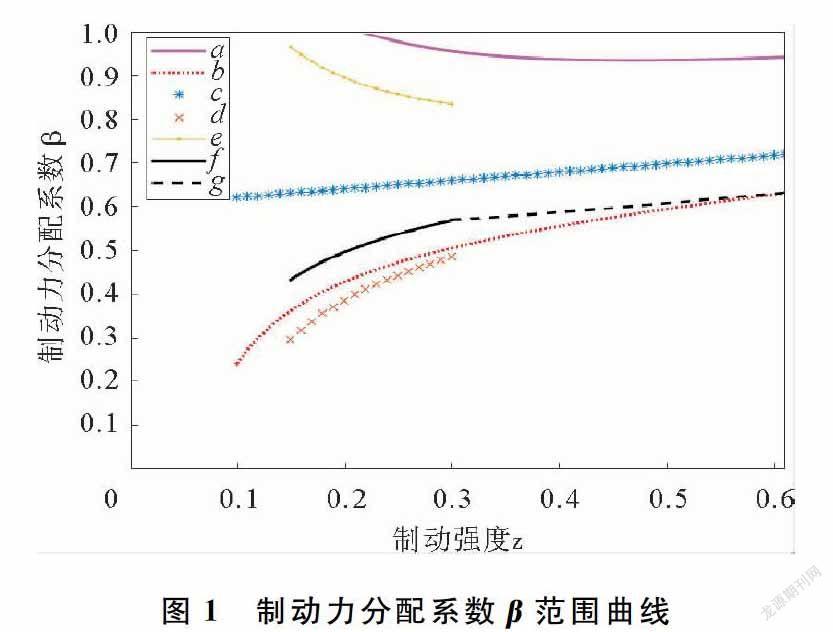
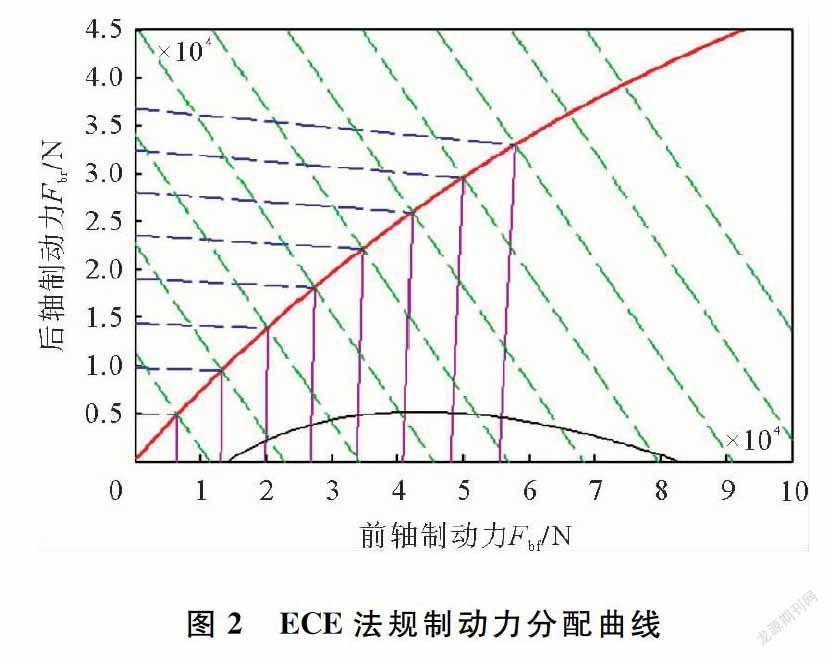
1 ECE制动法规要求
2 串联复合制动控制策略设计
根据ECE法规的要求,结合制动力分配系数、车速、附着系数及电机性能等影响因素,本文提出一种针对负载隔离式电动客车的制动力分配控制策略,称为串联复合制动控制策略,该策略由电机组成的再生制动系统和前后轮制动器组成的机械摩擦制动系统的控制。因为只有驱动轮才可进行制动能量回收,也就是在负载隔离式电动客车中,只有后轮才可进行制动能量回收。在保证制动稳定性的前提
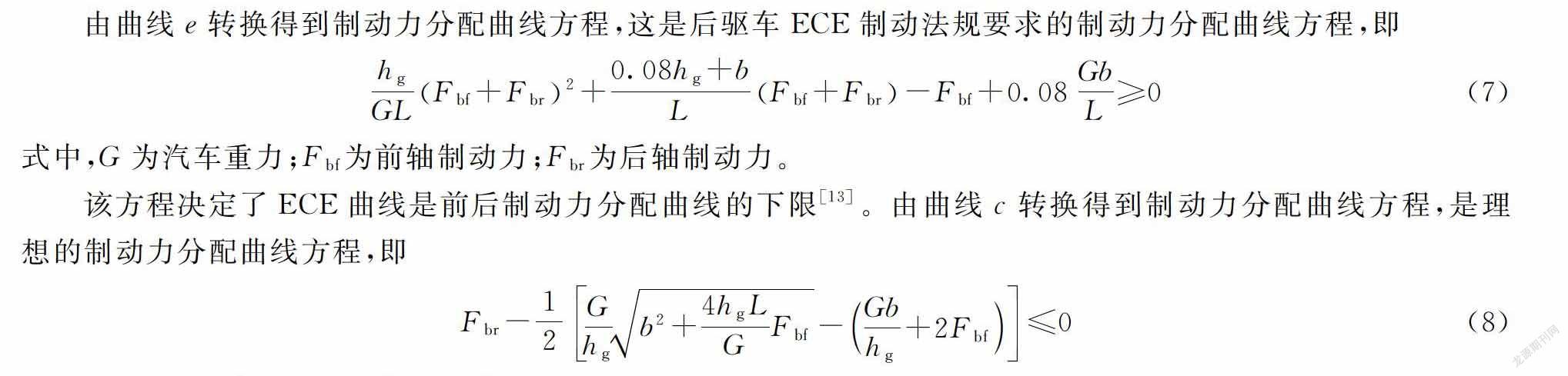
本文所提出的串联复合制动控制策略基于制动力分配方法,即在强度制动小时,将制动力分配到后轮,且只有后轮的再生制动系统起作用,进行制动能量回收,制动力分配曲线如图3所示。虽然存在后轮比前轮提前抱死的可能,但在低附着系数路面φ<0.2上,配备ABS系统的整车允许后轮的利用附着系数大于前轮[4],且很多学者在进行后驱电动汽车制动能量回收策略设计时均采用该假设;当制动强度继续加大,超出后轮再生制动系统作用范围时,前后轮制动力分配按照r曲线进行,如图3线段AB所示;当制动强度持续加大,直到r曲线与I曲线相交时,此时前后轮制动力分配按照I曲线进行,也就是进行理想的制动力分配,如图3中线段BC所示。
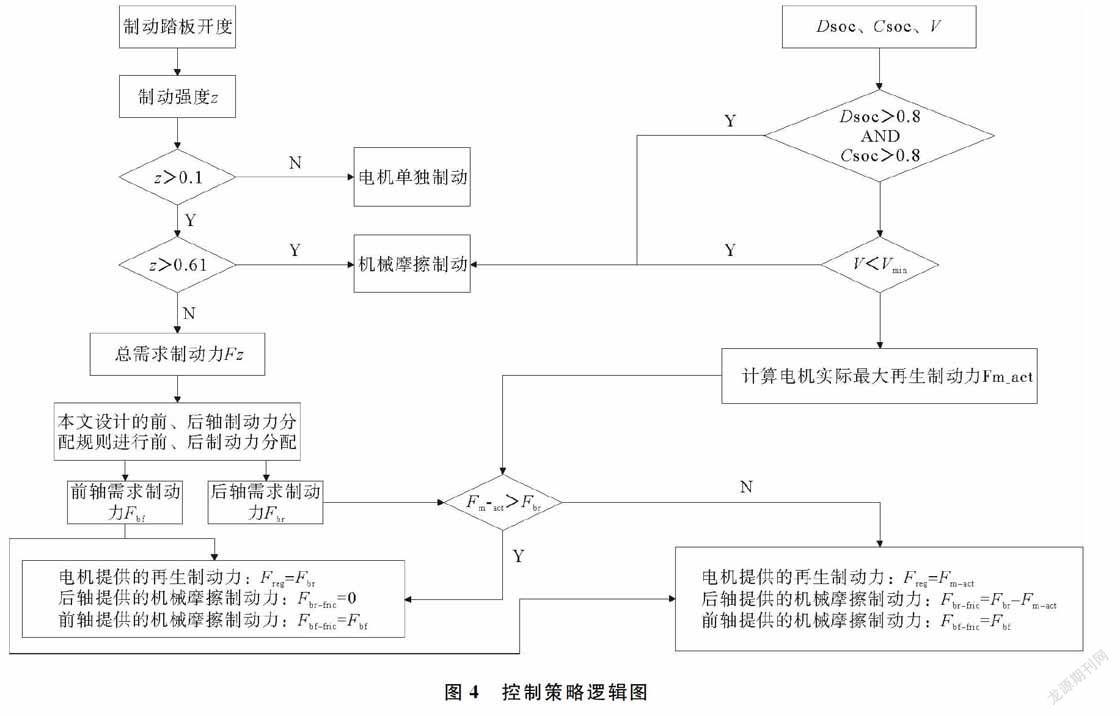
由串联复合制动控制策略的制动力分配曲线,设计控制策略的逻辑图,控制策略逻辑图如图4所示。只有当制动压力Brake_pressure>0时,电动客车处于制动工况;如果制动压力Brake_pressure=0,说明驾驶员没有采取制动措施,此时为驱动工况。图4中,以制动踏板开度为输入信号,判断制动强度的大小,从而决定选用哪种制动系统进行制动。
当制动强度z≤0.1时,由再生制动系统进行制动和能量回收,即由电机单独进行制动;当制动强度z处于0.1~0.61之间时,计算电动客车的总需求制动力Fz,然后按照图3所示的制动力分配曲线进行前、后轮的制动力分配,前轮需求制动力全部由前轮的机械摩擦制动力提供,后轮需求制动力需要分情况讨论。当后轮需求制动力小于或等于电机提供的再生制动力时,后轮需求制动力全部由电机的再生制动力提供,此时后轮不提供机械摩擦制动力;当后轮需求制动力大于电机提供的再生制动力时,后轮需求制动力由电机的最大再生制动力和后轮补充的机械摩擦制动力提供;当制动强度z>0.61时,属于大强度紧急制动工况,为保证制动安全,不采用再生制动系统进行制动,前后轮制动力均由机械摩擦制动系统提供。
在控制策略逻辑中,采用哪种制动系统还需考虑储能电池SOC、动力电池SOC、车速V及电机实际最大再生制动力Fm-act。当储能电池SOC和动力电池SOC都大于0.8时,为避免电池过充,此时不采用再生制动系统,制动力全部由机械摩擦制动系统提供;当电动客车当前车速V再生制动的最低车速Vmin时,即车速太低时,为了降低对电机的损耗,不采用再生制动系统进行制动,制动力均由机械摩擦制动系统提供;当储能电池SOC和动力电池SOC至少有一个小于0.8,且电动客车当前车速V大于最低车速Vmin时,计算电机实际的最大再生制动力Fm-act,然后根据后轮需求制动力Fbr和电机实际最大再生制动力Fm-act的大小,分情况讨论制动力由哪种制动系统提供,0.1 该串联复合制动控制策略中,需要特别说明:
1) 当电机制动力不能满足客车制动需求时,使用后轴机械摩擦制动力对客车制动需求进行补充。
2) 当储能电池SOC<10%,且动力电池SOC<20%时,发动机启动。对动力電池进行充电,使动力电池的SOC维持在20%左右,从而驱动汽车行驶,直至燃油消耗空,汽车停止。
3) 发动机的负荷率通过PID模块控制。PID控制模块的输入信号是需求转速和实际转速,经运算和判断,输出信号是发动机负荷率。
3 负载隔离式电动客车模型搭建和控制策略模型搭建
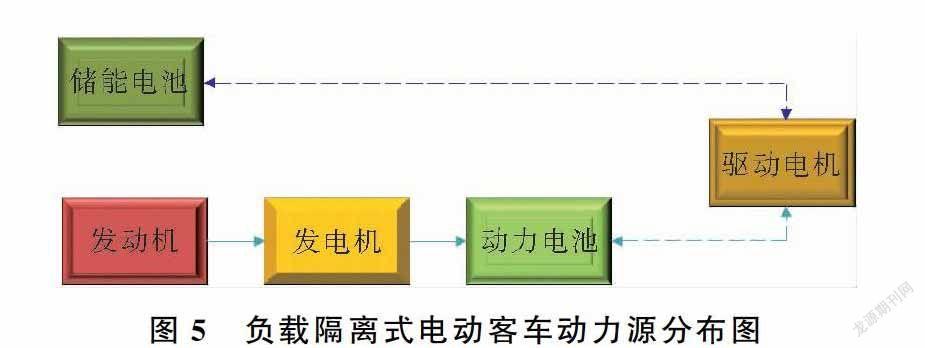
本文使用AVL_CRUISE软件对负载隔离式电动客车建模。AVL_CRUISE软件是一款具有模块化建模能力的车辆仿真软件,集成化的车辆模块使建模更方便。负载隔离式电动客车模型包括储能电池模块、动力电池模块、驱动电机模块、发动机模块、发电机模块、主减速器模快、差速器模块及车身电器等模块,达到将负载和发动机
储能电池和动力电池的设计,优化了负载隔离式电动客车的能量提供系统。储能电池负责主要能量的提供,当储能电池放电使SOC降到最低限值时,由动力电池放电提供给电动客车需求的能量。负载隔离式电动客车既有储能电池,又有动力电池,其动力源分布如图5所示。
在控制策略模型搭建过程中,本文使用了Matlab/Simulink软件对串联复合制动控制策略进行模型搭建。Simulink作为集成化软件,具有强大的建模能力。本文搭建的控制策略模型,包括制动力分配模块、复合电源管理模块和发动机控制模块。该模型共有车速信号、电动机转速信号、驾驶员负荷率信号、驾驶员制动压力信号、动力电池SOC信号、发电机转速信号、储能电池SOC信号、电机功率信号、储能电池与动力电池功率信号、储能电池与动力电池最大充电功率信号等12个输入信号,同时也包括电机负荷率信号、后轴机械摩擦制动信号、前轴机械摩擦制动信号3个输出信号,其中又分为发动机开关信号、发动机负荷信号、发电机开关信号、发电机负荷信号、储能电池开关信号、动力电池开关信号等。
采用DLL方式对串联复合制动控制策略的有效性和合理性进行验证,即建立动态链接库的方式,实现AVL_CRUISE软件和Matlab/Simulink软件的联合仿真,从而对串联复合制动控制策略的制动能量回收效果进行分析[1420]。在传感器从车辆模型中采集到控制策略模型所需的输入信号后,通过控制策略模型的计算和逻辑判断,实现串联复合制动控制策略所设计的要求,输出信号即为该策略达到的控制效果。
4 CITY_CYCLE循环行驶工况仿真分析
本文所研究的负载隔离式电动客车为后驱式电动汽车,负载隔离式电动客车主要参数如表1所示。采用中国城市公交车行驶工况CITY_CYCLE工况作为仿真工况,分别进行不带串联复合制动控制策略的循环工况仿真分析和带串联复合制动控制策略的循环工况仿真分析。设置电池初始SOC值为100%,CITY_CYCLE循环工况基本参数如表2所示。假设在发动机不工作的情况下进行仿真。
对续驶里程进行仿真,不考虑串联复合制动控制策略时,续驶里程为186.00 km;考虑串联复合制动控制策略时,续驶里程为237.50 km,提高了27.69%。两种策略的循环工况电耗对比图如图6所示。由图6可以看出,不考虑串联复合制动控制策略时,百公里电耗为79.30 kWh;嵌入串联复合制动控制策略时,百公里电耗为51.28 kWh,减少了28.02 kWh。电机输出电流对比如图7所示。考虑串联复合制动策略的电动客车,仿真运行时有回馈电流,不带串联复合制动策略的电动客车,仿真运行时没有回馈电流。
此外,进行CITY_CYCLE循环工况仿真分析,对车辆模型设置行驶里程,直到电池达到设定的最低界限,车辆停止运行,仿真制动能量回收率。带策略的车辆模型的动力电池,总回收能量为24.77 kWh,总消耗能量为96.85 kWh,制动能量回收率为25.58%。
5 结束语
为提高负载隔离式电动客车的能量利用率且增加续驶里程,本文基于ECE制动法规对负载隔离式电动客车的制动力分配进行分析,提出了一种串联复合制动控制策略。在Matlab/Simulink软件中搭建控制策略模型,嵌入AVL_CRUISE软件搭建的负载隔离式电动客车模型中联合仿真,对控制策略的合理性和有效性进行了验证。仿真结果表明,与不考虑串联复合制动控制策略的电动客车相比,该策略电动客车的制动能量回收率达到25.58%,续驶里程增加了51.51 km,百公里电耗减少了28.02 kWh,从而验证了该策略的合理性和有效性,解决了负载隔离式电动客车续驶里程短的问题。该研究为负载隔离式电动客车的实际应用提供了理论依据,为进一步研究负载隔离式电动客车和再生制动、复合制动及其控制策略方面的工作奠定了基础。
参考文献:
[1] 甄娜. 面向后驱动复合电源电动汽车仿真的ADVISOR二次开发研究[D]. 西安: 长安大学, 2011.
[2] 宋翠萍. 负载隔离式电动汽车动力系统匹配与性能仿真研究[D]. 青岛: 青岛大学, 2016.
[3] 洪吉超. 负载隔离式纯电驱动汽车性能仿真与控制策略研究[D]. 青岛: 青岛大学, 2015.
[4] 张抗抗, 徐梁飞, 华剑锋, 等. 后驱纯电动车制动能量回收系统及其策略的对比研究[J]. 汽车工程, 2015, 37(2): 125131, 138.
[5] 张俊智, 薛俊亮, 陆欣, 等. 混合动力城市客车串联式制动能量回馈技术[J]. 机械工程学报, 2009, 45(6): 102106.
[6] 赵治国, 彭玉钢. 四驱混合动力轿车串联式电液复合制动仿真[J]. 系统仿真学报, 2012, 24(2): 448455.
[7] 李国斐, 林逸, 何洪文. 电动汽车再生制动控制策略研究[J]. 北京理工大學学报, 2009, 29(6): 520524.
[8] 舒红, 秦大同, 胡明辉, 等. 轻度混合动力汽车再生制动能量管理策略[J]. 机械工程学报, 2009, 45(1): 167173.
[9] 余志生. 汽车理论[M]. 5版. 北京: 机械工业出版社, 2009.
[10] 侯典平, 张洪信, 赵清海, 等. 负载隔离式电动汽车再生制动控制策略研究[J]. 青岛大学学报: 工程技术版, 2017, 32(2): 130137.
[11] 侯典平, 张洪信, 赵清海, 等. 纯电动汽车再生制动力控制策略优化研究[J]. 机械制造, 2017, 55(3): 47.
[12] 高树健. 电动汽车再生制动控制策略设计与仿真[D]. 西安: 长安大学, 2013.
[13] 刘红亮, 董学平, 张炳力. 电动汽车再生制动控制策略的研究[J]. 合肥工业大学学报: 自然科学版, 2012, 35(11): 14841487.
[14] 彭金雷. 纯电动汽车整车控制策略研究[D]. 广州: 华南理工大学, 2013.
[15] 何经纬. 基于Cruise的混联式HEV控制策略研究[D]. 西安: 西安理工大学, 2016.
[16] 杨海圣, 姬芬竹, 杨世春. 基于SimulinkCruise联合仿真的制动能量回收系统研究[J]. 控制工程, 2018, 25(6): 10861090.
[17] 侯典平. 负载隔离式电动客车再生制动控制策略研究[D]. 青岛: 青岛大学, 2018.
[18] 王猛, 孙泽昌, 王士奇, 等. 基于一体式制动主缸的电液复合制动系统仿真[J]. 同济大学学报: 自然科学版, 2014, 42(8): 12111215, 1220.
[19] 余卓平, 韩伟, 徐松云, 等. 电子液压制动系统液压力控制发展现状综述[J]. 机械工程学报, 2017, 53(14): 115.
[20] 何畅然, 王国业, 张露, 等. 电动汽车新型再生机械耦合线控制动系统机理研究[J]. 汽车工程, 2018, 40(3): 283289.
