基于离散混合蛙跳算法的RV减速器结构优化
2019-09-10张宇赵转哲赵帅帅刘永明何康
张宇 赵转哲 赵帅帅 刘永明 何康

摘要:针对RV减速器对结构优化结果精度不高且需要手工圓整的问题,提出一种基于离散混合蛙跳算法的单目标优化求解方法.首先,以体积最小为目标建立了RV减速器整机的非线性约束优化的数学模型;其次,介绍了离散混合蛙跳算法基本原理;通过罚函数法将上述数学模型转化为无约束优化的数学模型后,应用离散混合蛙跳算法对RV减速器整机实例进行优化求解;最后与传统算法、粒子群算法及遗传算法进行对比,结果表明,离散混合蛙跳算法的求解结果有着求解精度更高,收敛速度更快、避免对结果进行手工圆整等优点.
关键词:RV减速器;结构优化;离散混合蛙跳算法;罚函数法
中图分类号:TH122 文献标识码:A 文章编号:1673-260X(2019)04-0099-05
1 引言
RV减速器作为机器人驱动关节运动的核心部件,有着传动效率高、承载能力强、传动效率高、回程误差小等优点,已在工业机器人领域广泛应用.但由于国内RV减速器发展起步时间较晚、设计理论与生产工艺尚未成熟、制作成本高等不足,使得大多机器人相关企业不得不向外国进口引入性能优良的RV减速器.这就意味着国内对RV减速器的结构进行优化与改良显得尤为重要.因此,国内有很多学者对此展开研究:苏德瑜[1]等以整机效率最高及体积最小作为优化设计目标,分别进行基于遗传算法与NSGA-II算法对其进行优化求解;张景钰[2]等基于遗传算法的RV减速器体积和效率多目标优化;张飞翔[3]等基于传统等距-移距组合修形方法,以提升RV减速器承载能力为修形目标,建立摆线轮修形量搜寻数学模型,并用格点法进行求解.以上学者研究都对RV减速器参数的改进做出了突出的贡献.由此笔者尝试使用新的群智能算法,目的是在上述学者研究成果的基础上对RV减速器参数进一步改良,使减速器整机性能更佳.
混合蛙跳算法(Shuffled Frog Leaping Algorithm,SFLA),作为一种新型的启发式仿生物学群智能优化算法,有着概念简单、计算速度快等优点以及颇为优秀的计算求解能力和全局搜索能力.现已被广泛运用于水资源分配、桥墩维修、车间作业流程安排等工程实际应用问题.
本文提出一种基于离散的混合蛙跳算法实现对RV减速器进行体积单目标优化的新方法.旨在满足整机刚度、强度、传动效率等的前提下对RV减速器结构做出进一步的改良,使其在空间要求更为苛刻的场合也能灵活应用.
2 RV减速器结构优化的数学模型
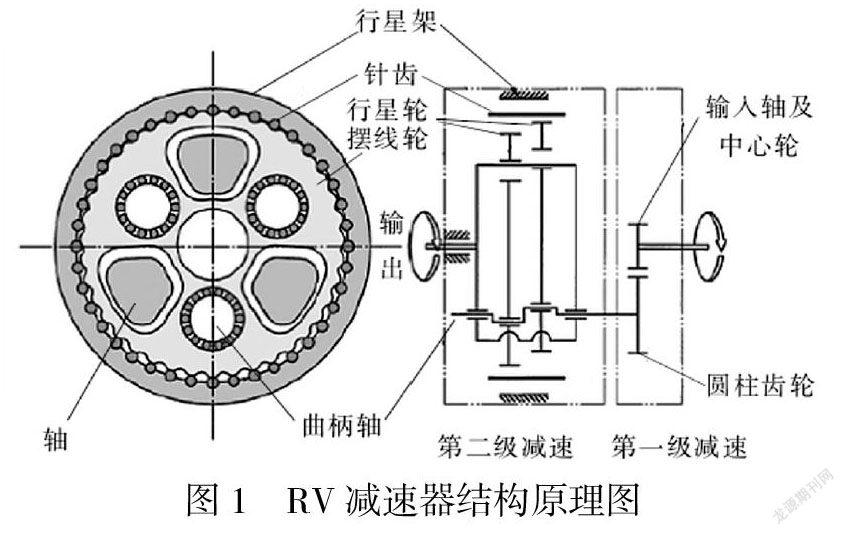
2.1 RV减速器结构原理[4]
如图1所示,RV减速器是一个封闭差动轮系,在结构上分为两部分.其中,差动轮系部分由输入轴及中心轮、行星轮以及行星架构成;封闭部分是一个摆线针轮行星传动机构由曲柄轴、摆线轮、针齿以及针齿壳构成.如果针齿壳固定,则行星架视为输出构件;若行星架固定,则针齿壳作为输出构件.本文选择针齿壳为输出构件.
2.2 RV减速器的数学建模[4]
RV减速器的体积主要由一级渐开线齿轮传动部件以及二级摆线针齿传动部件尺寸大小决定,为了减轻二级传动中摆线轮与曲柄轴之间的作用力,要求一级齿轮传动中心距略大于二级传动针轮中心圆直径的四分之一,而齿轮传动所占体积可近似与齿轮中心距呈线性正相关,因此不妨以一级齿轮传动中心距作为本设计的目标函数(记为f(x)),以中心距最小为最优解建立数学模型.
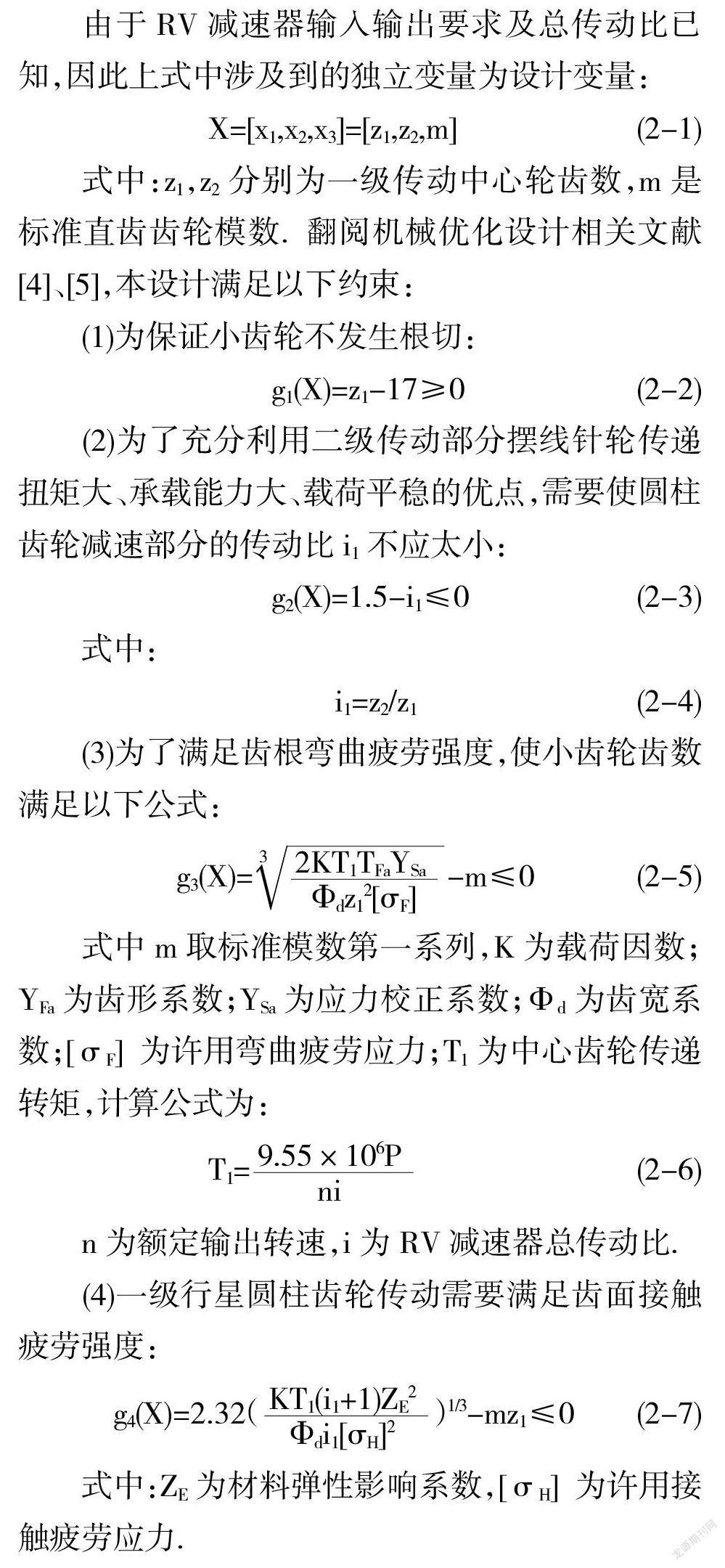
由于RV减速器输入输出要求及总传动比已知,因此上式中涉及到的独立变量为设计变量:
(2)为了充分利用二级传动部分摆线针轮传递扭矩大、承载能力大、载荷平稳的优点,需要使圆柱齿轮减速部分的传动比i1不应太小:
(3)为了满足齿根弯曲疲劳强度,使小齿轮齿数满足以下公式:
式中m取标准模数第一系列,K为载荷因数;YFa为齿形系数;YSa为应力校正系数;Φd为齿宽系数;[σF]为许用弯曲疲劳应力;T1为中心齿轮传递转矩,计算公式为:
(4)一级行星圆柱齿轮传动需要满足齿面接触疲劳强度:
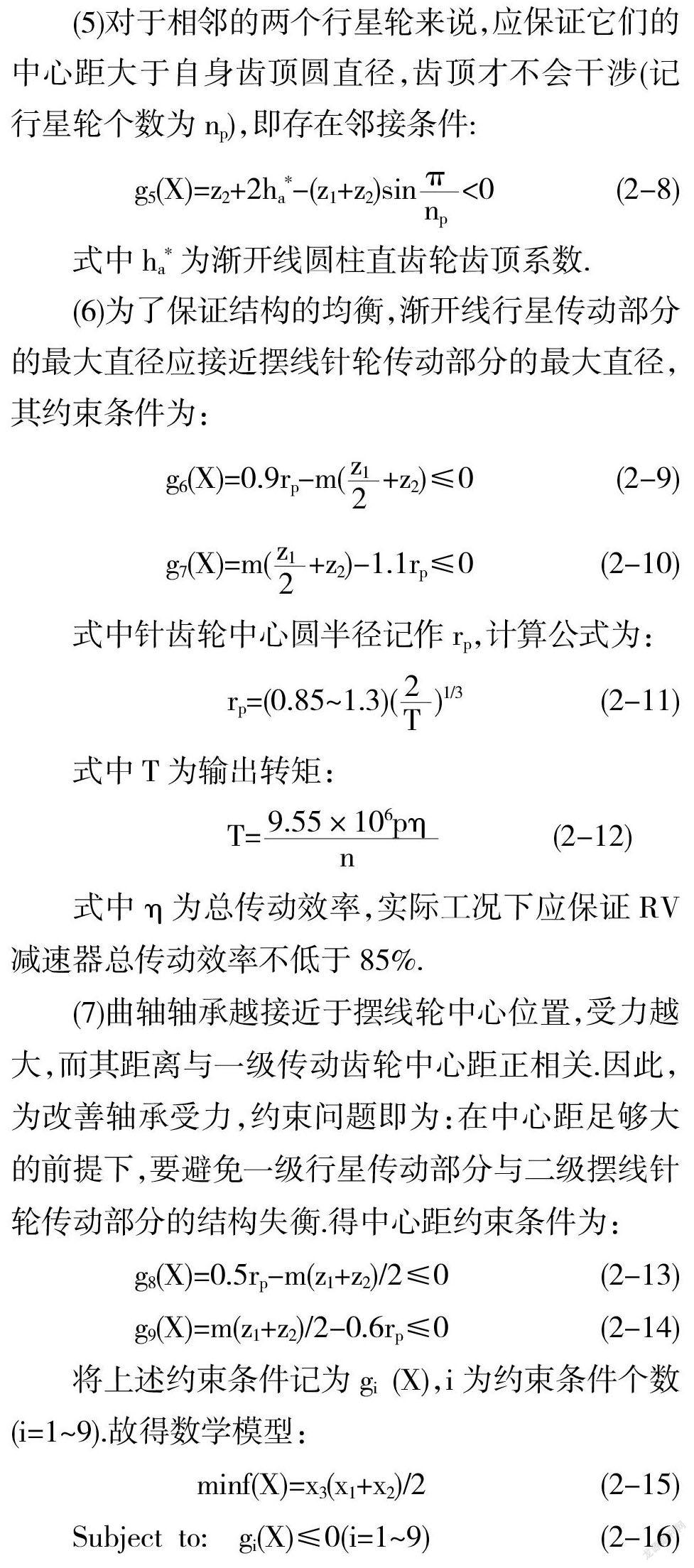
(5)对于相邻的两个行星轮来说,应保证它们的中心距大于自身齿顶圆直径,齿顶才不会干涉(记行星轮个数为np),即存在邻接条件:
(6)为了保证结构的均衡,渐开线行星传动部分的最大直径应接近摆线针轮传动部分的最大直径,其约束条件为:
式中?浊为总传动效率,实际工况下应保证RV减速器总传动效率不低于85%.
(7)曲轴轴承越接近于摆线轮中心位置,受力越大,而其距离与一级传动齿轮中心距正相关.因此,为改善轴承受力,约束问题即为:在中心距足够大的前提下,要避免一级行星传动部分与二级摆线针轮传动部分的结构失衡.得中心距约束条件为:
将上述约束条件记为gi(X),i为约束条件个数(i=1~9).故得数学模型:
3 离散混合蛙跳算法简介
3.1 混合蛙跳算法简介
该算法模拟生物界青蛙群体寻找食物的过程:设想有一个青蛙种群,每只青蛙携带自己的解因子,其表现为自身位置与食物的接近程度.它们都在寻找食物,且食物仅有一块,位置固定.青蛙分为大小一致的不同族群,为了使各族群中更加远离食物的青蛙获得靠近食物的机会,在各个族群中分出一个子族群,子族群内部每只青蛙通过与自身位置附近的具有优良解因子的青蛙个体进行局部的信息交流,学习和获取社会经验并向更加接近食物的位置完成一次跳跃.当各个族群完成若干次进化后,重新随机分组实现全局搜索的目的,并重复上述更新过程,规定迭代若干次后或精度达到要求后终止算法,获得与目标接近的最优解.本例中以达到全局迭代次数为终止条件.混合蛙跳算法基本步骤如下[6]:
(1)求解的基本参数定义:族群个数记为m;每个族群包含青蛙个体数记为p;全体种群包含青蛙个体数记为U=mp;每个族群青蛙局部信息交换次数记为Lmax;全局迭代次数记为Gmax;子族群个体数记为q,最大跳跃距离记为最大步长Smax等.
(2)初始化种群:通过变量在定义域范圍的限制,使用rand函数随机生成p个青蛙个体组成种群,对其按适应度大小进行排序,并寻找到全局最优青蛙Ug.
(3)进化开始:全体种群按照间隔抽样的规则进行族群分配,每个族群创建一个子族群,记录最差青蛙Uw,子族群最优青蛙Ub,并对Uw进行Lmax次局部搜索进化,Uw’表示最差青蛙获得更新后的解.计算Uw’,若适应度值优于Uw,则取代Uw;若不如Uw,则用Ug取代Ub,重复(3),若结果仍旧无改进,则随机产生一个青蛙代替Uw.
(4)各个族群打乱合并后,新族群按上步的选择规则重新建立,并更新全局最优青蛙;检查是否达到规定全局迭代次数,若是,则算法结束,记录此时全局最优解和对应适应度函数的值,反之,则回到(3)执行.
3.2 混合蛙跳算法的离散化
对于实际问题中需要在多维离散变量中寻求一组适应度值最小的解,就需要对传统混合蛙跳算法做出以下改进:
(1)相对于传统的连续型混合蛙跳算法,离散蛙跳算法在初始化种群时采用对多维离散变量逐个编号,并采用随机抽号的方式生成一组离散变量作为一个解,重复利用便生成含有F个解向量的青蛙种群.
(2)在算法执行局部搜索更新策略之前,需要把青蛙转换成(1)中确定的编号:全局最优青蛙Ug对应编号Ugs;局部最差青蛙Uw对应Uws;局部最优青蛙Ub对应Ubs;并把编号带入更新策略,更新局部最差青蛙Ubs,更新完成后对应编号重新转化为编号对应的实际变量值;
(3)在局部更新策略中添加产生离散值的取整函数round,使得最差青蛙得到更新后的值依旧能在所给离散变量内找到相同的值.局部更新策略:
Ss表示离散解最差青蛙的更新步长;r1,r2代表rand函数(0~1)之间随机取值的大小.Uws’为最差青蛙更新后的含有变量编号的矢量;先把Uws’转化到对应的实际变量值,再对其进行其他操作.其他算法步骤思想与原混合蛙跳算法类似.
4 基于离散混合蛙跳算法的寻优实例
4.1 RV减速器设计参数[4]
减速器选用RV-450E系列,基本参数:传动比i=81;输出转速n=5r/min;输入功率P=4.28kW.由于其对于精度要求高,通常选用硬度高,耐磨性好的20Cr经过渗碳淬火处理作为一级传动齿轮材料.查阅机械手册及相关文献,数据经插值拟合得到:载荷因数K=1.10;齿形系数YFa=2.91;应力校正系数YSa=1.53;齿宽系数Φd=0.3;总传动效率η=0.88;许用弯曲疲劳应力[σF]=640MPa;许用接触疲劳应力[σH]=1800MPa;材料弹性影响系数ZE=189.9MPa1/2;行星轮个数为np=3;齿顶高系数ha*=1.
4.2 群智能算法的适应度函数构造
一般而言,群智能算法的适应度函数与传统算法目标函数相同,但在具体实例中,群智能算法要求适应度函数不加约束,这就引出了如何使约束条件由非线性不等式约束转化为无约束的问题.针对此类问题,提出构造惩罚函数的思想.
从第2节数学模型构造可以看出,RV减速器优化设计是非线性不等式约束下的非线性目标函数优化.基于惩罚函数法,在目标函数内引入惩罚项的方式使得非线性不等式约束转化为无约束问题,由于本例中存在非线性不等式约束,故选用外点罚函数法构造以下适应度函数:
M为罚函数因子,g(X)为不等式约束,h(X)为等式约束.根据罚函数法原理,当M值取足够大时,F(X,M)的最优解(最小值)近似接近f(X).由于约束条件内无等式约束,故惩罚函数可以写为:
通过上式将本次优化中的对复杂的约束优化转化为求对简单的无约束问题的优化,F(X,M)在混合蛙跳算法中对应蛙群适应度函数.
4.3 群智能算法基本参数设置
为与PSO与GA算法结果形成对比,设置三种群智能算法终止条件皆为达到全局迭代次数时停止;使各算法局部更新次数Lmax和全局迭代次数Gmax保持一致;求解问题维数D与随机生成的群体个体数F相同.参考文献[6]得Lmax=40;Gmax=200;D=3;U=400;由于变量x1,x2上界约束未给定,在保证算法的精度与效率、方便计算的条件下,使上下界间隔尽量拉开,用MATLAB语言表示为:x1=[17:1:71],x2=[27:1:101];x3取第一系列标准齿轮模数[0.2,0.25,…20],以下不再赘述.
4.3.1 离散混合蛙跳算法(D-SFLA)参数设置
本例RV减速器体积优化问题中设置族群数m=20;每个族群青蛙数p=20;子族群含青蛙个数q=15;最大步长Smax为步长系数Lst乘以设计变量X上下界之差,本例步长系数Lst取0.5.
4.3.2 粒子群算法(PSO)参数设置
PSO算法受鸟群觅食这种自然界生物行为的启发而诞生,其对应优化问题的潜在解可理解为D维搜索空间上的一个点,每只鸟以自己所在点x决定自己的适应度函数值,以自身速度v作为下次位置更新的依据.算法基本步骤可简略的描述为:首先一定规模的鸟群在解空间内随机进行分布,各个方向(维)初速度在[-1,1]范围内随机生成,各向初速度矢量和记为v0;然后每只鸟学习自身历史经验,以及鸟群社会经验更新自身的位置与速度,渐渐向最优位置靠拢;在迭代结束后,鸟群紧密的聚集在最优点附近,此时提取最优解,寻优结束.粒子群算法的速度与位置迭代模型[8]:
式(4-1)表示算法速度更新策略,等式右边由个体惯性因素、对自身历史的学习因素、对社会经验的学习因素三部分组成;上标字母k表示更新代数,1≤k≤Gmax=200;w为惯性权重,c1,c2为学习因子;依据经验取w=0.9,c1=c2=2;pbest表示自身历史极值点;gbest表示全部群体所达到的极值点;等式(4-2)表示位置算法的更新策略.由于解空间的范围限制,设定各方向速度边界值vmax=1,vmin=-1;使更新过程中大于边界值的速度替换为vmax,小于边界值的速度替换为vmin.
4.3.3 遗传算法(GA)参数设置
本例采用MATLAB自带的遗传算法工具箱[9]进行寻优.调用gaoptimset与ga函数,由4.2所述设置种群规模,迭代次数与终止迭代代数.用MATLAB语言可表示为:
options=gaoptimset('PopulationSize',400,
'Generations',200,'StallGenLimit',200'PlotFcns',{@gaplotbestf,@gaplotbestindiv});[x_best,fval]=ga
(fitnessfcn,nvars,[],[],[],[],[17;27;0.2],[71;101;20],[],options);
4.4 優化结果
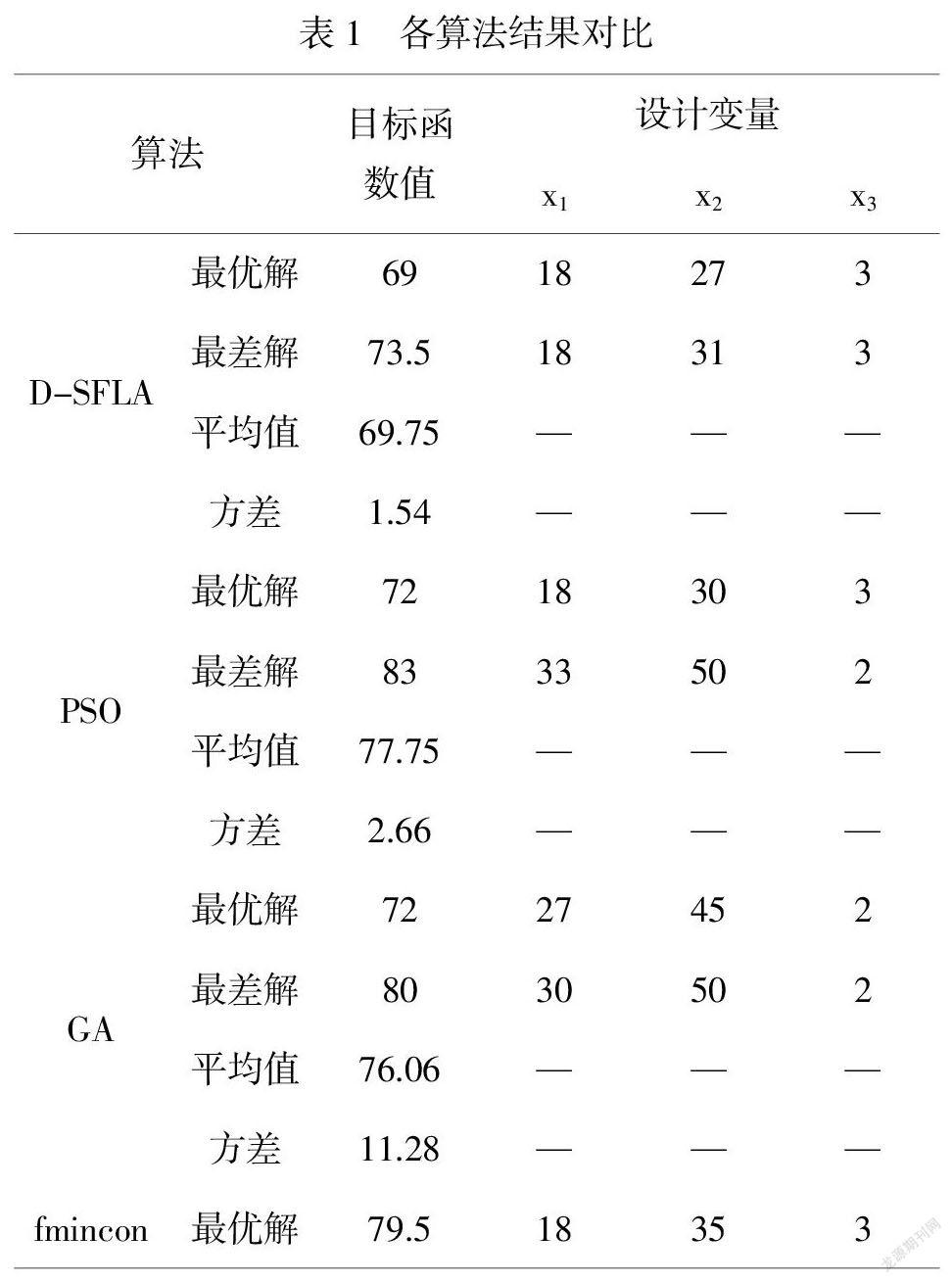
在迭代参数与4.3节一致的条件下,基于离散混合蛙跳算法(D-SFLA)、粒子群(PSO)算法与遗传算法(GA)分别对RV减速器体积优化数学模型独立求解20次,分别对PSO和GA算法优化结果进行手工圆整,并在优化结果中加入参考文献[4]中利用MATLAB中fmincon函数圆整后得到的最优解,目的是使上述各算法间相互形成对比,结果见表1.
从表1中数据可以看出基于群智能算法的最优结果适应度值比fmincon函数得出的最优解降低大约12.5%,使用群智能算法优化效果显著提升.对三种群智能算法统计最优解、最差解、平均值、方差.看出离散混合蛙跳算法得出结果最优;其最差解的适应度值甚至接近PSO与GA算法的最好解;平均值,方差也最小.这显示出离散混合蛙跳算法不仅求解精度最高,结果稳定,还不易陷入局部最优.另外,由于PSO与GA算法都需要对结果手工圆整,这就体现出离散混合蛙跳算法使寻优结果上更有说服力,更有科学性.
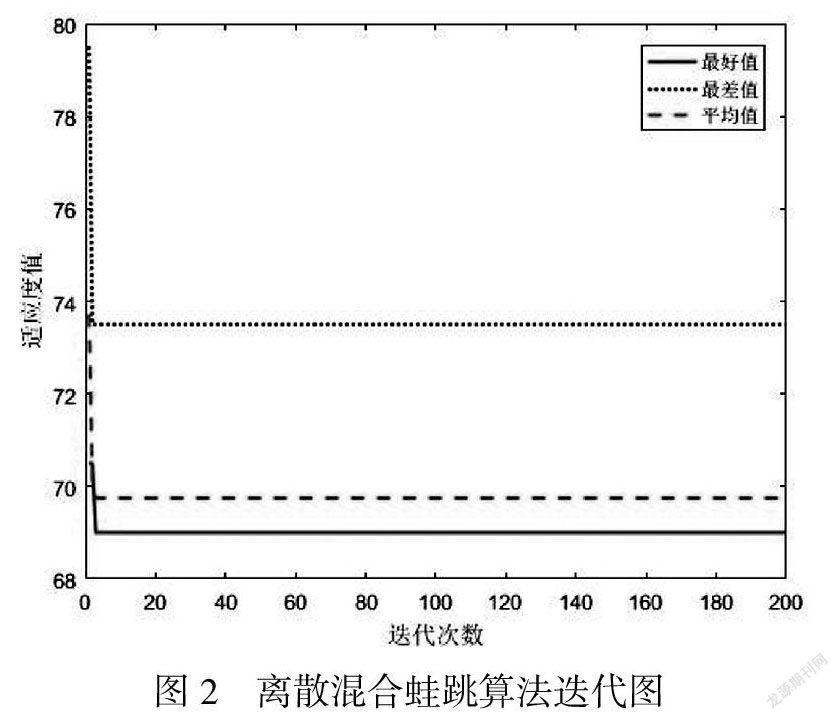
衡量算法收敛速度的快慢常用算法的迭代曲线图表示.利用离散混合蛙跳算法20次求解数据绘制迭代曲线如图2.
由图2可看出三条迭代曲线中无论是最好值还是最差值都在算法迭代早期(不超过10代)就可以趋于稳定,可见离散混合蛙跳算法在对RV减速器体积最小寻优实例中有着求解速度快,收敛迅速的优点.
5 结论
本文通过对RV减速器体积最小单目标寻优过程中应用离散混合蛙跳算法,求解结果不仅明显优于传统非线性约束寻优函数fmincon,而且相比其他群智能算法得出的结果精度更高、收敛速度更快、全局寻优能力更强、且其结果生成后即可使用,无须手工圆整.上述优点表明离散混合蛙跳算法可以作为解决离散变量优化问题的新方法.
参考文献:
〔1〕苏德瑜.基于遗传算法的摆线针轮减速器多目标优化设计[D].湖南科技大学,2015.
〔2〕张景钰,曹巨江.基于遗传算法的RV减速器多目标优化[J].陕西科技大学学报,2017,35(06):145-148+170.
〔3〕张飞翔.工业机器人RV减速器摆线轮齿廓修形技术研究[D].华南理工大学,2018.
〔4〕王瑞,陈江义.RV减速器的优化设计[J].机械制造,2017,55(09):34-37.
〔5〕王新春.摆线轮齿廓修形及RV减速器设计[D].哈尔滨工业大学,2017.
〔6〕赵转哲.混合蛙跳算法的改进及在旋转机械故障诊断中的应用研究[D].东南大学,2016.
〔7〕何卫东,单丽君.RV减速器研究现状与展望[J].大连交通大学学报,2016,37(05):13-18.
〔8〕秦媛.粒子群算法改进及其应用研究[D].南京邮电大学,2018.
〔9〕郁磊,史峰,王辉,等.MATLAB智能算法30个案例分析[M].北京:北京航空航天大学出版社,2011.