无人机机载拖曳干扰实现
2019-09-10吕晓林
吕晓林


机载拖曳干扰是一种新的自卫式干扰方式,通过拖缆牵引诱饵,对敌方雷达产生射频干扰,可逼真模拟载机的航速、航向及雷达反射特性,使雷达无法通过运动特性来区分载机和诱饵,提高了载机的生存能力。
随着科学技术的发展,争夺电磁战场控制权成为决定局部战争胜负的关键。二十世纪末国外第三代战斗机已普遍装备机载拖曳干扰设备,有必要对其组成、工作原理进行分析,结合国内实际情况,对机载拖曳干扰实现进行研究,探讨机载拖曳干扰保障能力的实现。
机载拖曳式干扰设备组成、工作原理
机载拖曳干扰设备组成
机载拖曳干扰设备一般由机上设备、拖缆及投放装置、拖曳诱饵等组成。机上设备包括雷达信号接收机、干扰信号产生器、控制器和电源等;拖缆主要由光缆、电缆和承力缆组成;投放装置含绞盘和投放器等;拖曳诱饵含光电转换器、功率放大器、发射天线等。
机载拖曳式干扰原理
载机侦测收到雷达信号后,释放拖曳诱饵,拖曳式诱饵内装有放大转发器,对雷达信号进行放大转发,与载机雷达回波信号一起对雷达形成双点源干扰,对于非相参干扰,诱饵产生的效果是使雷达跟踪两点源能量中心上;对于相参干扰,将产生合成场,在合成场作用下雷达跟踪能量较大的点源,雷达天线跟踪轴偏离目标,从而提高飞机的存活率。
拖曳干扰实施时机
诱饵释放时,应保证飞机和诱饵对雷达形成的张角小于雷达的角分辨率。在距离上应保证飞机和诱饵对雷达形成的距离差小于雷达的距离分辨率,在速度上应当保证飞机和诱饵相对于雷达的径向速度差小于雷达的速度分辨率。
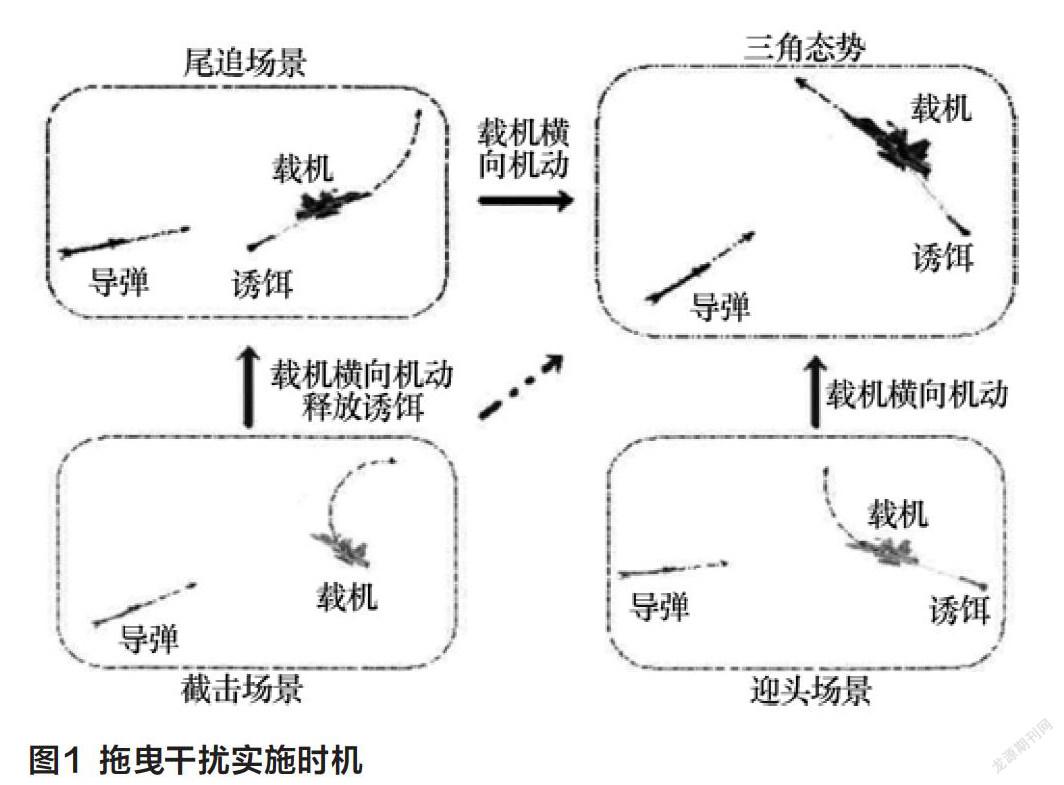
(1)尾追攻击时的战术措施
当载机发现有导弹进行尾追攻击时,载机应加速向导弹攻击同一方向高速飞行,并投下拖曳诱饵,在方位、距离和速度上让导弹稳定跟踪诱饵,此时的诱饵与载机的距离、速度、角度基本一致,制导雷达难以分辨,而诱饵很容易捕获制导雷达的距离、速度跟踪波门。
(2)拦截攻击时的战术措施
当导弹距离载机较远时,立刻转向,并加速向导弹飞行方向机动,尽快变为“尾追攻击”的态势,然后选择时机,突然向左或向右急转弯,构成“三角态势”。
(3)迎头攻击时的战术措施
迎头攻击时,导弹和载机的相对速度很高,它们之间的距离一般不会太远,此时很难进行180°的大转弯,只能向左或向右急转并加速飞行,尽快形成“三角态势”,以便利用诱饵的强干扰能量把导弹吸引过去,或者使导弹从载机和诱饵中间穿过。干扰实施时机如图1所示。拖曳干扰国内外现状和发展趋势
国内外现状
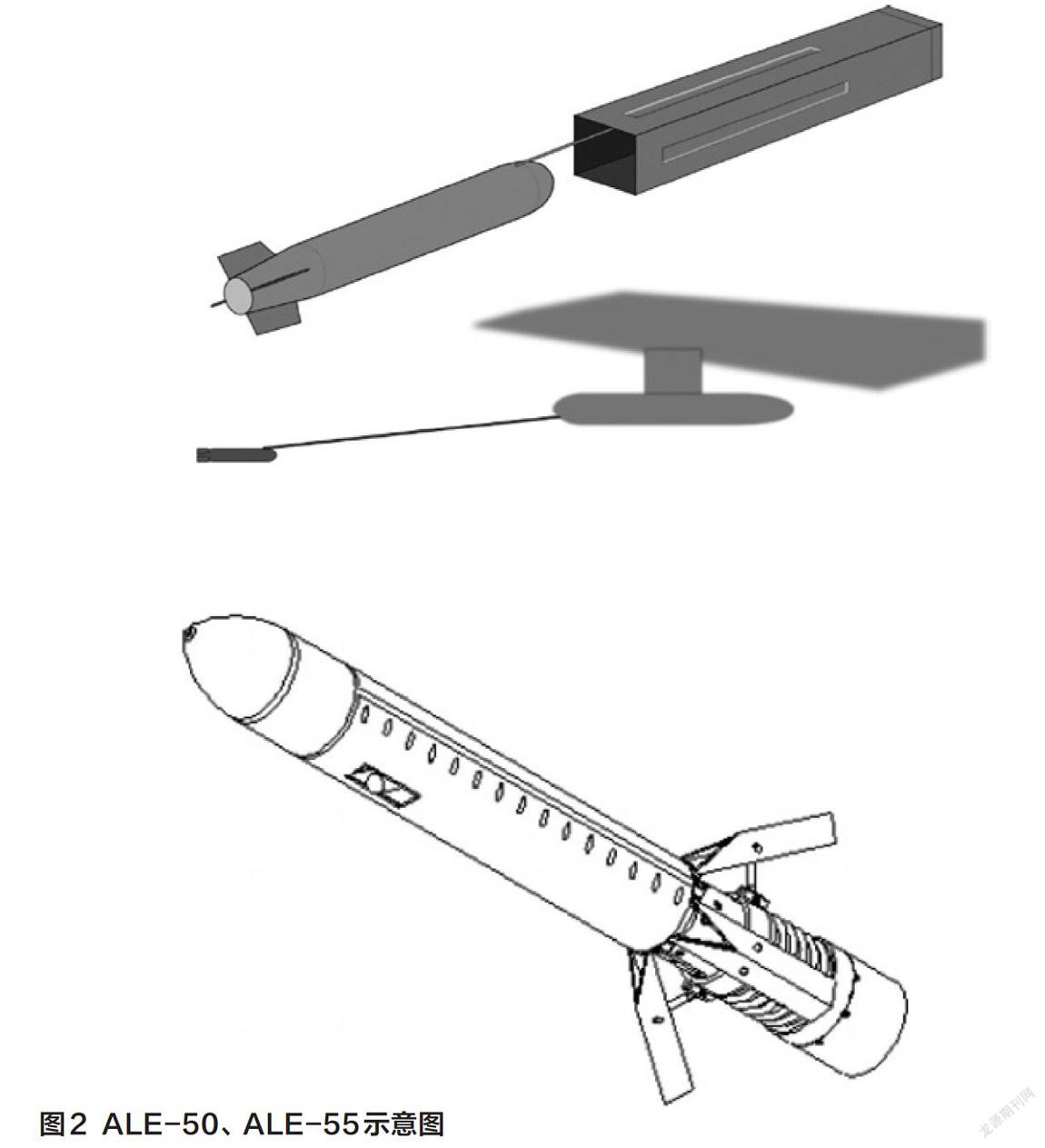
AN/ALE-50拖曳诱饵系统是一种机载电子反制系统,广泛部署于美军各型战机上。AN/ALE-50系统包括一具发射/控制装置和多枚诱饵,每枚诱饵均安装于密封的金属容器内。ALE-50拖曳式诱饵是简单的转发型诱饵,诱饵放在一个有电缆卷轴的发射筒中,诱饵在使用后丢弃。设备由飞机供电,有独立的威胁信号接收和干扰信号发射模块,诱饵一旦接收到威胁信号就将信号放大并转发出去,ALE-50还可对威胁信号进行简单的調制,欺骗雷达跟踪。
为了提高拖曳诱饵的干扰能力,新研了ALE-55光纤拖曳式诱饵,如图2所示。ALE-55光纤拖曳式诱饵具有很宽的频率覆盖范围,不仅能转发威胁雷达信号,而且还能利用飞机上干扰机产生的欺骗信号来诱骗来袭导弹。
目前,西方国家主要装备的拖曳式有源雷电干扰诱饵有:英国马可尼雷达和防御系统公司的“瞪羊”诱饵、美国雷声公司的AN/ALE-50、桑德斯公司的AN/ALE-55、瑞典摄氏技术电子公司的B02D和德国戴姆勒一克莱斯勒航空公司的“空中蜂鸣器”。
发展趋势
拖曳式有源诱饵经历了两个发展阶段,第一阶段的诱饵主要由电缆拖引在载机后方,诱饵将载机传输过来的雷达调制信号或其它噪声信号进行简单转发,第一代拖曳式诱饵工作带宽较窄,工作频率低。随着光纤传输线的应用,机载电子战对抗侦察系统能够对截获的高频段宽带雷达信号进行复杂的调制,通过光纤传输给诱饵,由诱饵负责转发,进一步提高干扰效果。
经过不断改进,拖曳诱饵能发射欺骗和压制性雷达干扰信号,同时将干扰发射天线设计成一个全方位的雷达角反射器,可以模拟一架飞机的雷达反射信号,使飞机具备主动/被动综合干扰能力。机载拖曳干扰实现方式
无人机拖带诱饵
拖曳干扰系统由机载雷达侦查告警设备、控制与投放吊舱、拖曳诱饵、拖缆等组成。吊舱安装在无人机机翼下,拖曳诱饵挂载在吊舱下方。控制与投放装置接收到投放指令后,施放拖曳诱饵,载机通过拖缆拖带诱饵飞行。无人机与拖曳诱饵之间的拖缆内有光纤,可进行数据传输,拖曳诱饵对收到的雷达信号进行光电转换、放大、转发,拖曳诱饵工作参数可通过无人机测控链路下传到地面。
(1)拖曳诱饵
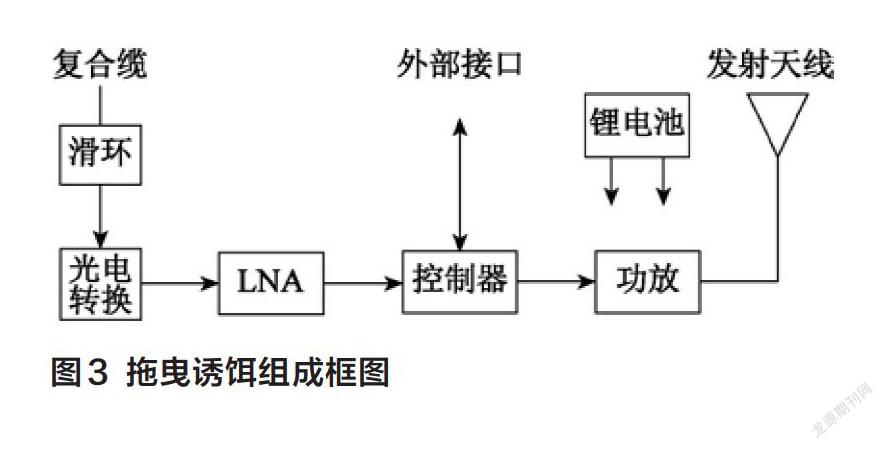
干扰设备集成于拖曳诱饵体内,采用电池供电,拖曳体安装有稳定尾翼,以保持拖曳时的稳定飞行。
干扰设备由光电转换器、低噪声放大器、控制器、功放、发射天线及锂电池等组成,组成框图如图3所示。
(2)吊舱
吊舱由控制与投放装置、拖缆等组成。控制与投放装置可用在施放前通过锁闭机构携载拖曳诱饵飞行,在接收到投放指令后,施放拖曳诱饵。控制与投放装置由控制器、拖曳体携载与锁闭机构、线缆施放机构、断缆机构等组成。拖曳体携载与锁闭机构可以保证施放前拖曳诱饵的可靠挂载,控制器接收到投放指令后,控制锁闭机构开锁,使拖曳诱饵与无人机分离。线缆施放机构可保障拖曳体的平稳施放,线缆施放到预定长度后,施放机构自动锁紧。控制器接收到断缆指令后,控制断缆机构切断拖缆。
(3)拖缆
拖缆主要承受拖带诱饵飞行时的拖带张力,需根据受力情况选取合适的材料与线径,拖缆长度不小于100m。
为了实现载机与拖曳诱饵之间数据传输功能,拖缆采用复合缆。线缆中间布置数据传输线,外层为承力结构以承受线缆张力。为防止拖曳飞行过程中拖缆产生旋转,采用滑环与拖曳体连接。
(4)无人机
根据作战任务对无人机飞行性能要求,机载雷达侦查告警设备对无人机的有效载荷、空间、供电要求,吊舱和拖曳诱饵气动特性、结构重量对无人机机翼挂载能力要求以及拖曳诱饵投放后在拖带飞行过程中和母机不发生干涉对母机气动外形、结构布局的要求,选择合适的无人机作为母机。目前国内有多款大型无人机可作为拖曳干扰飞行平台。
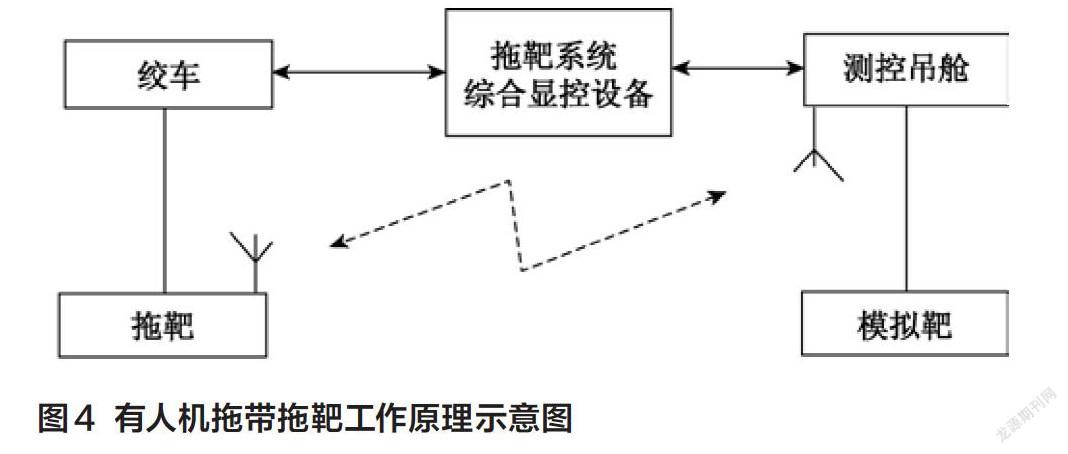
(5)有人机拖带拖靶
拖曳干扰系统由绞车、测控吊舱、拖靶、模拟靶、拖靶综合显控设备、拖缆等组成,干扰设备集成在拖靶体内。拖靶和绞车之间通过钢制拖缆连接,在一定预紧力作用下吊挂在绞车下,绞车通过制式挂架安装在有人飞机机翼下。绞车和测控吊舱与飞机通过机内电缆进行数据传输,拖靶和测控吊舱通过无线链路进行数据传输,绞车、测控吊舱和拖靶工作状态参数显示在拖靶综合显控设备上,飞行员通过拖靶综合显控设备控制绞车收放拖靶。其工作原理如图4所示。
干扰设备由接收天线、光纤存储、处理控制、功放、发射天线及锂电池组成。接收天线接收雷达信号,经滤波、放大后分为两路,一路进入光纤存储系统,电光调制后,经过可编程的迟延光纤延迟线,完成对雷达信号的存储;光电解调、信号放大后经发射天线辐射出去。另外一路送给处理控制模块,完成对雷达信号的检波测量,根据测量结果,控制光纖存储设备中延迟线抽头,实现对雷达信号转发延时;同时处理控制模块对整个设备进行监测,将设备工作状态参数上报。干扰设备组成如图5所示。
拖曳干扰主要有待机和干扰两种工作状态。
(1)待机状态
拖靶被释放后,干扰设备进入待机工作状态,此时仅处理控制等低功耗设备加电工作,处理控制单元对雷达信号进行检测,一旦发现存在有雷达信号,则转入干扰状态。
(2)干扰状态
根据检测到的雷达信号时域参数,处理控制单元控制光纤存储设备的转发时延量,并控制功放进入功率放大状态,对雷达进行转发干扰。
上述两种实现方式各有优劣,有人机拖带拖靶采用光纤存储雷达信号方式,具有损耗低、保真度高等特点,和数字存储方式相比,设备功耗低,同时拖靶通过绞车进行收放,可回收拖靶,费效比高,适用于训练演练,不适合实弹射击使用;无人机拖带诱饵虽然诱饵内干扰设备简单,但干扰样式多、模拟逼真度高,由于诱饵不可回收,适用于实弹射击,不适合训练演练使用。两者互补性强,可根据实际情况,选择使用。
结论
通过分析机载拖曳干扰原理和实施过程,针对任务需求,利用有人机拖带拖靶、拖靶内加装干扰设备和无人机拖带诱饵实现了机载拖曳干扰,为后续相关任务开展提供参考和借鉴。