海上多旋翼无人机全自主航拍系统设计
2019-09-10王雷计世勋
王雷 计世勋


设计了一种适用于海上自主航拍的多旋翼无人机系统。根据无人机系统需求,对多旋翼无人机的起飞与降落、全自主飞行控制、云台控制、续航能力、机动性与稳定性等技术难点进行了研究与设计,提出了解决方案。
常规影视航拍无人机通常采用多旋翼飞行器作为飞行平台,由飞行操作手和云台操作手分别对无人机和云台进行实时控制,航程和高度一般控制在操作手可视范围内,对飞行距离有较高需求的航拍任务一般采用FPV(无人机第一视角飞行)或自主导航飞行,这两种飞行模式下通信系统需采用数传通信,最大飞行时间则因为抗风因素会有所缩短。以上任何一种飞行模式下相机拍摄角度的控制均需要云台操作手依据图传接收端画面对云台进行实时控制。而海上全自主无人机航拍系统与常规影视航拍系统相比,对无人机系统提出了更高的性能指标要求和更多的功能要求,主要表现在对无人机系统的续航能力、起降可靠性、飞行机动性和稳定性、自主飞行和目标跟随能力、云台自主目标拍摄能力以及摄像系统和数据传输系统等都提出了较为苛刻的要求。
系统需求能力分析
无人机续航能力分析
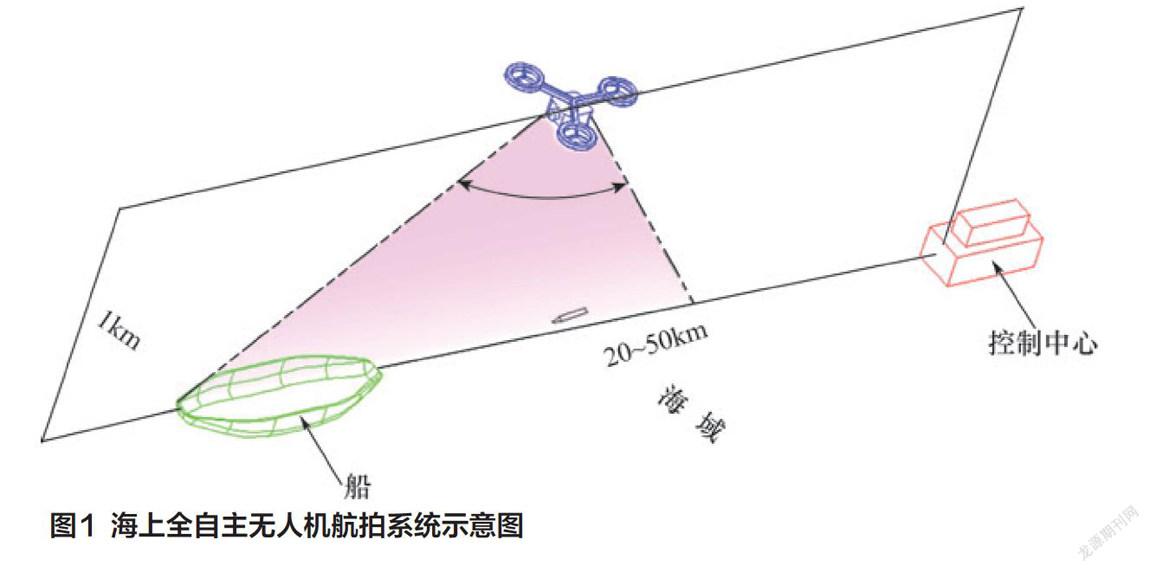
海上全自主无人机航拍系统采用船上起飞,无人机自主拍摄,数据回传至远端控制中心的工作模式,如图1所示。
假设无人机在1000m高空执行航拍,这就要求无人机有较高的续航能力,从而保证无人机有足够动力执行爬升、悬停、返航全过程。在不计海风的干扰下:以5m/s的爬升速率计算完成爬升1000m高度则需要3min20s的时间,爬升阶段能量消耗率较高,折算成悬停航时约为7-9min。以3m/s下降速率计算,返航降高1000m需要5min33s,该过程能量消耗率相对较低,折算成悬停航时约为3-4min。假设定点悬停任务时间为10min,则执行任务全过程无人机续航能力需求可以表示为:最大无风悬停飞行续航能力为20-23min。再考虑到海面1000m以下的实际风力影响,续航能力指标应设定为:最大无风悬停飞行时间约为30-35min。
无人机起降可靠性与飞行稳定性分析
由于海面风浪较大,这要求无人机能够在摇摆的甲板上实现安全起降,常规起降方式在该项目中可靠性很低,极有可能在起降阶段产生侧翻。这就要求采用非常规起降方式,如弹射式起飞或脱钩式放飞。返航着落方式应设计为软着落,如在甲板返航点设置回收网,或在海面直接降落。海面直接降落则要求将无人机设计为具备防水功能的两栖无人机。
此外,无人机的抗风能力应较高,从而保证海上任务过程中的姿态稳定性和航线的保持能力,抗风能力指标应达到5-6级,这一要求与续航能力要求有一定矛盾,在动力配置(电机和桨)较高的情况下,这一矛盾可以消弱。可根据实际任务载荷、抗风等指标来综合权衡从而选择或定制更加合适的电机及螺旋桨。
图像采集与远距离数据传输分析
在100Om高空拍摄海面上高速移动物体对相机的成像精度、变焦能力以及成像速度都有較高要求,可同时挂载两套云台和相机分别对高空全景和船体近景细节进行拍摄,需要针对性的选择高分辨率和高倍变焦相机,对录像帧数也有一定要求。如要实现图像在地面指挥控制中心的实时直播,还需选择远距离的高清数字图传设备。如要同时实现在高空中对细节的高速拍摄与直播,则同时要满足高倍变焦、高速拍摄以及高速图像传输,这对相机和图传以及播放设备都有极高要求,即使满足所有条件实况直播时肉睛也无法感知,这需进一步探讨。可使用高速摄影机近距离独立记录与回放。
数据传输方案有两种选择,第一种方案是无人机与地面控制中心直接通信,这要求将远距离传输设备直接搭载在无人机端,这对无人机载重能力要求较高。第二种方案即分为两段传输,第一段是无人机与船体建立通信,无人机只需搭载1-2km传输能力的数据传输设备,而远距离数据传输设备作为中继站放置在船体,由该中继站与地面控制中心建立第二段通信。
关键技术难点及解决方案
在需求分析中已基本阐述该无人机系统应达到的性能指标,与已经相对成熟的影视航拍无人机系统相比,关键技术难点及解决方案可以概括如下:
无人机的起飞与降落设计
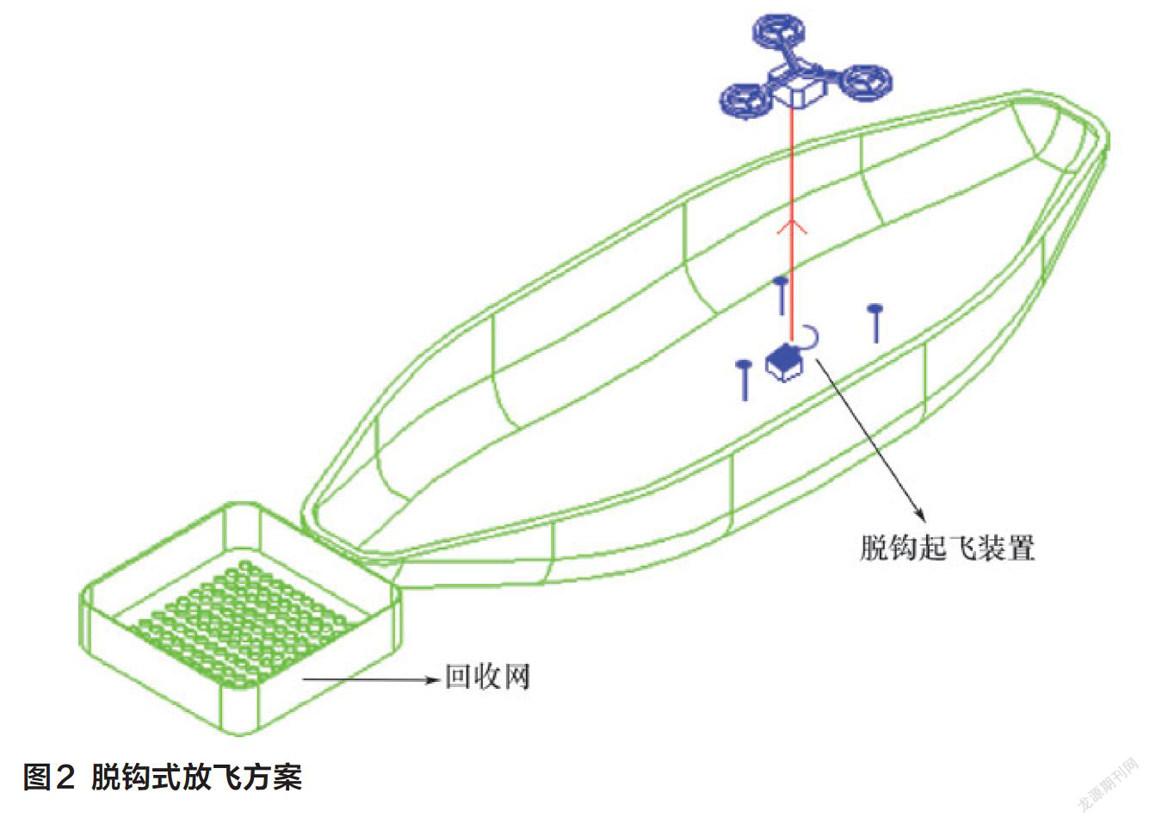
小型船体在海面的低频晃动较大,常规起降过程中无人机刚离地阶段极易受到甲板的晃动击打到而坠毁。为了保证起降的顺利进行,这里给出“脱钩式放飞”方案,见图2。起飞前无人机机体与船面三个支撑点保持接触,触点带有凹槽。机体与船体的连接通过安装在机体中心下方的封闭环与安装在船体上的倒置挂钩连接来实现,使得无人机与船体在起飞前保持相对静止关系。
起飞前无人机首先启动各个旋翼,当旋翼拉力达到较高值(确保放飞瞬间的向上加速度)时,安装在船体的倒置挂钩通过舵机的转动控制来执行放飞指令。这样的设计不仅利用了无人机自身的动力系统来实现了快速弹射效果,同时也保证了起飞前无人机处于稳固的待命状态。
降落则是通过船体安装回收网来实现,根据GPS定位精度以及无人机特征尺寸,网的特征尺寸应达到4-5m。降落时无人机应飞至回收网正上方一定高度,然后将电机停转。如果高速移动物体可能导致回收网在任务过程中发生损坏,则需安装双层回收网,其间隔应不低于高速移动物体可能导致的破坏范围。
全自主飞行控制、云台控制设计
任务全程自主飞行与拍摄过程,涉及到飞行控制与云台控制两个方面。
(1)飞行控制
现有技术已具备全自主飞行(绝对航线)的能力,但因为拍摄目标是海面漂浮的船体,如果船体随着海浪产生位置的漂移,那么飞行控制系统和云台控制系统需要融入船体位置的自主跟随技术。实现方法是在船体安装定位系统将其绝对位置实时传送给无人机飞行控制系统,飞行控制系统根据船体的绝对位置进行实时计算,依据预先设定的拍摄计划,对无人机进行实时位置修正,始终保持无人机与船体的相对位置关系。
(2)云台控制
现有云台技术是用来消除无人机飞行中的俯仰、横滚与航向角的低频晃动与高频振动,仅用来保证拍摄时相机的稳定性。而自主拍摄所需要的角度等信息,则由飞行控制系统依据船体与无人机的当前坐标、拍摄计划等数据实时计算出并发送给云台控制系统。从而实现拍摄航向角、俯仰角的自动调整,使相机准确捕获画面。
细节拍摄和全景拍摄很难两全,这里可采用双云台方案。第一套云台用来全景定焦拍摄,1000m高空全景拍摄时,海平面上的高速移动的物体在全景中移动速度相对较慢,可选择成像分别率和帧数较高的专业级相机。第二套云台挂载高倍光学变焦相机来实现在高空下的船体细节同步拍摄,该云台需要增加变焦控制,方法是通过电机或舵机结合皮带的传动来控制相机镜头的变焦,高倍变焦下,云台的增稳精度在的放大的画面中也会被相应降低,这也需要对云台增稳精度做进一步优化。这样无人机在千米高空中即可实现近景细节的拍摄,从而在远端的实时画面中呈现船体的细节特征。
无人机的续航能力、机动性与稳定性的综合权衡与优化
根据需求分析中所拟定相关任务时间,并假定采用无人机与船体中继通信方案,有效载荷以挂载上述两套相机及相应云台、2km数据传输设备为准,可以得出该无人机飞行性能应大致滿足以下条件:最大无风悬停飞行时间应达到30-35min,抗风能力应达到5-6级,有效载荷8-10kg。有效载荷不变的情况下,飞行器动力系统配置(电机与桨)额定功率越大,相对有效载荷就越小,续航时间则越长。而动力系统功率配置相同的情况下,选择不同规格的桨叶,对应的抗风能力(机动性)和续航时间也不同,表现为:抗风性能越强,续航时间越短。
依据上述规则,在安全性允许的情况下,该无人机应尽量使用大功率电机,同时应尽量选择抗风能力更强的桨叶,适当牺牲续航能力(保证最终续航能力仍满足条件)。根据经验,这里给出一套机动性较高的飞行器动力配置方案:电机采用规格φ80×60mm、重量800g,工作电压50V,螺旋桨规格为26×85,重量80g。室内测试该套动力配置在拉力为5000g时工作电流为约13A,功率约650W,若以该套动力为配置,设计为6旋翼方案,飞行器平台(不合有效载荷及电源)总重约为8-10kg,若采用平铺式布局,对边电机轴距为1500mm,最大特征尺寸2160mm,如采用共轴式(3轴6旋翼)设计最大特征尺寸为1660mm。搭配电池最佳匹配规格为12S 50000mah锂电池,重约11-13kg。依据上述数据中间值,无人机起飞总量约为30kg,最大无风悬停飞行时间约为38min,抗风能力为5-6级。
考虑到评估误差,该飞行器设计方案也至少能够达到30-35min无风悬停时间(其它性能指标不变),已满足无人机仅与船体中继通信方案对飞行器性能的需求。在飞行器设计与综合方案上还可做进一步优化,无人机整备重量仍有至少2-3kg的优化空间。也可采用上述动力配置的8旋翼方案,在有效载荷不变的情况下进一步提升续航时间6-8min。或续航时间不变的情况下有效载荷可提升至12-15kg,在该有效载荷下若能满足承载远距离数据传输系统的重量,该8旋翼方案也可作为无人机与地面控制中心直接通信方案下的载机。
结束语
通过对海面无人机全自主航拍系统项目需求的分析,可以看到有诸多技术难点。从无人机在船体的起降、飞行控制和云台控制的智能化以及无人机的飞行性能等关键技术难点和提出的解决方案来看,每一个难点都可在现有研发技术的基础上通过新的设计方法或更合理的动力配置、载荷分配等得到解决,没有技术瓶颈,本方案也具有很高的短期内可实现性。同时,该无人机系统在其他对自主能力要求很高的航拍领域也具有非常高的应用价值。(参考文献:略。如有需要,请联系编辑部。)