地形三维显示与轨迹预测之初探
2019-09-10潘昊
潘昊

【摘 要】本文对地形三维显示的实现与飞机飞行轨迹的预测进行了初步的探索。首先,分别对地形显示与轨迹预测进行了基本论述。然后,以太原市的高程数据为基础,在MFC应用程序平台下,应用OpenGL实现了太原市地形的三维显示与飞机预测轨迹的显示。最后,展示了在不同的飞行状态下显示的效果图。从效果上来看,初步实现了地形显示与轨迹预测的预期功能,但在实现细节上,仍存在一些问题,值得进一步探讨。
【关键词】三维地图;轨迹预测;数字高程模型
0 引言
在飞机高度信息化的今天,以往的飞行姿态、飞行速度、高度以及当前位置等基本信息,已不能满足飞机驾驶员的飞行需求。飞行路径的规划、地面高程、飞行障碍物高度以及各区域的安全飞行高度等参数信息,逐渐成为飞行员不可或缺的飞行参考数据。为此,航空电子地图可以很好地解决这个问题。三维地图可视化,可以为用户提供更加直观、真实的数据信息展示。而飞行轨迹预测,可以为飞行员提供更加准确、科学的飞行依据。地图可视化与轨迹预测,一直是近年来研究的热点。本文就地形显示与轨迹预测这两部分功能的实现,进行了初步的探索。并以太原市高程数据为例,初步实现了三维地形显示与预测飞行轨迹显示。
1 地形三维显示
1.1 地形数据
数字高程模型(Digital Elevation Model,DEM),是新一代的地形图,它通过储存在介质上的大量地面点空间数据和地形属性数据,以数字形式来描述地形地貌,是在某一投影面上的规则格网点的平面坐标及高程的数据集。
DEM的常用数据模型有规则格网模型、不规则三角网模型、等值线模型等。
规则格网模型,将空间区域分成规则的等距离单元,单个单元对应一个数值,通常在数学上表示为一个矩阵,在计算机中表现为一个二维数组,每个格网单元或数组元素对应一个高程值。用规则采样点数据或把不规则采样点数据内插成规则点数据,以矩阵形式来表示地面形状,已成为栅格数据结构中的通用形式。
按平面上等间距规则采样,或内插所建立的数字地面模型,称为基于栅格的数字地面模型,可以写成以下形式:
DEM = |Z|,i = 1,2,…,m;j = 1,2,n
上式中,Z为栅格节点(i,j)上的海拔高程。
格网数据结构是典型的栅格数据结构,可采用栅格矩阵及其压缩编码的方法表示。其数据包括三部分:元数据、数据头和数据体。元数据是描述DEM数据的数据,如数据表示的时间、边界、测量单位、投影参数。数据头存储了起始坐标、坐标类型、格网大小、行列数等。数据体存储了行列数分布的数据阵列。
由于受观测手段所限,或专业要求,在实际中获取的数据常不是规则网格数据,大多为不规则的离散数据。不规则采样点数据,可以内插成规则点数据,得到规则格网模型;也可以经过优化组合,得到不规则三角网模型。
1.2 地形三维可视化
地形可视化是空间信息系统中应用广,研究多的内容。可视化可以充分地表示空间数据处理分析的结果。
在地形可视化过程中,数字高程数据是三维显示的基础。通常,在大比例尺地形下用不规则三角网模型,以显示高精度小区域地形;在小比例尺地形下用规则格网模型,以显示宏观区域。
数字地形三维显示的常用方法有:线框法、表面法和体素法。
线框法,是通过物体的三维边缘框架来表示物体的几何形状。即将地形表面按一定间隔获取数据点,连成折线或者曲线,经投影变换后显示。
表面法,是将整个数据模型看作一个大的复杂空间曲面,来显示地形表面形状。具体实现时,将表面分成很多格网,以此为面元,作为基本单元进行处理。面元具有各自的属性可独立进行填充显示。
体素法,具有真正意义上的三维显示,它将空间物体分成很多的体元素,如长方体、台面体,作为基本单元进行处理。体元具有真三维特性。
三维地形的逼真显示通常以三角形作为运算的基本单元。应用OpenGL的光照模型和纹理映射,可以得到逼真的地形显示效果。
2 轨迹预测
轨迹预测,可以为飞行员提供更加精确的飞机位置的状态信息,在完成近障碍物飞行时,可以及时预警、防止冲突。
关于轨迹预测的计算方法,笔者大致接触过以下几种:模型法、拟合法、接微分方程法、还有一些其它方法。
模型法的思想,是为飞机的飞行过程建立一个数学模型。可能需要考虑环境因素(如:温度、风速、风向、重力加速度)、飞行阶段(如:爬升阶段、俯冲阶段)、飞行状态(如:姿态角、速度、加速度)、飛机参数(如:重量、机身形状、机翼面积)等影响。建模过程中,考虑越周全,模型就越精确、越复杂。而简化模型,可能会影响预测的效果。该方法适用于在特定飞行阶段,并且数学模型简单的情况。
模型法是一种最贴近飞机真实物理运动的方法。而下面这两种方法不需要考虑太多额外因素,主要关注于飞机最近时间段的历史位移序列,来预测未来短时间内的飞行轨迹。
拟合曲线的思想,是用历史位移序列点,来进行曲线拟合。拟合出的曲线,即为预测的飞行曲线。曲线拟合方法分为线性拟合、多项式拟合、指数拟合和高斯拟合。由于高斯拟合具有计算积分简单快捷的优点,这种拟合方法非常实用。
解微分方程法,类似于拟合曲线法,也是求飞行的位移曲线。不同的是,它是通过构造离散化的微分方程,来求解该微分方程。所得的解,即为预测的轨迹方程。龙格—库塔法,是一种经典的被广泛应用的求解方法。
卡尔曼滤波是一种非常经典的算法,常用于目标跟踪系统。利用目标的动态信息,可以得到一个关于目标下一个位置的非常好的估计。
除了预测结果的准确性外,预测方法的计算速度也是需要着重考虑的。
3 地形及轨迹显示过程
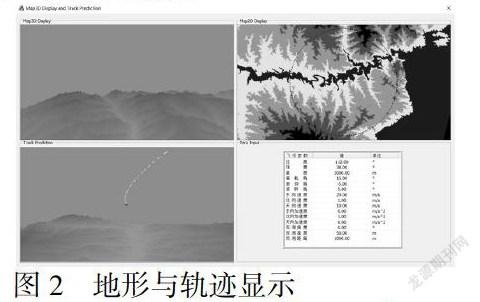
地形三维显示利用VS2019编程实现。高程数据,选取太原市地形的栅格数据。该数据来源于地理空间数据云上SRTM的DEM原始高程数据。数据文件格式为GeoTiff格式。下图为太原市高程数据。
本文实现了地形的三维显示、二维显示以及预测轨迹的显示,如下图所示。
轨迹预测及显示
本文使用最为简单的模型法,来计算飞行轨迹。
V = V + a * Δt
X = X + V * Δt + a * Δt * Δt / 2
将飞机的加速度、速度和位移沿东、北、天三向分解,分步求出三个方向的分位移。
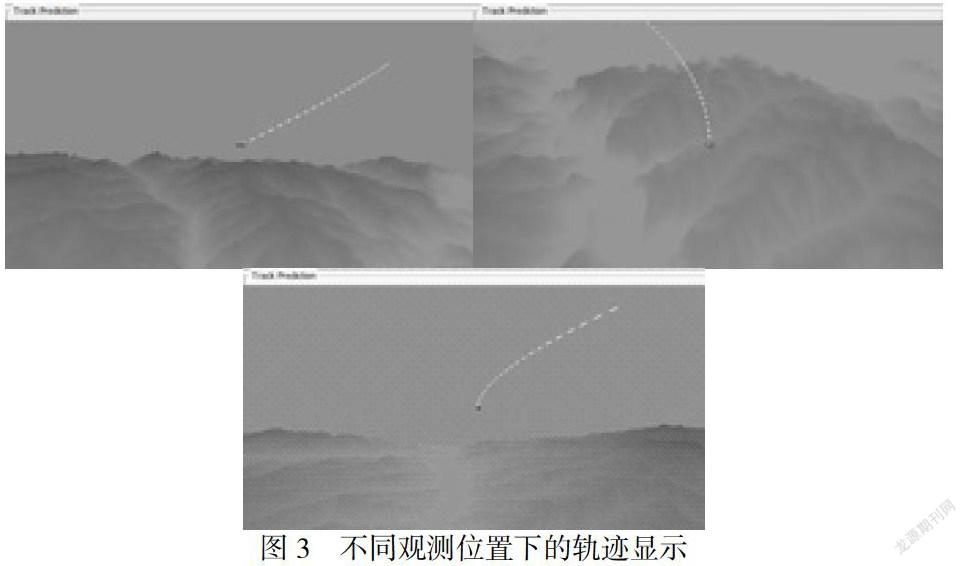
以下是在不同观测位置下的轨迹显示。
4 结论
本文对地形三维显示与轨迹预测方法进行了简要论述。并以太原市高程数据为基础,初步实现了地形的三维显示与预测轨迹的显示。初步达到了显示效果,但在细节上还存在一些问题值得进一步研究与学习。如:大规模地图数据的使用问题、地形三维显示的光照模型与纹理映射、几种预测算法在计算速度与准确性上的实际效果对比等。
参考文献:
[1] 郭向坤,大规模三维地形构建的关键技术研究[D],沈阳,中国科学院大学,2019.
[2] 孙影,王铁.基于时间序列的目标车辆轨迹预测算法[J].汽车实用技术,2020(6):31-33.
(作者单位:太原航空仪表有限公司 显示技术研究所)