火星大气进入滑模自抗扰制导方法*
2019-09-09朱东方聂钦博
李 翔,朱东方,胥 彪, 聂钦博
(1. 南京航空航天大学 航天学院·南京·210016;2. 上海航天控制技术研究所·上海·201109)
0 引 言
火星是距离地球最近的类地行星,对火星的探索研究对人类了解宇宙及开发外太空资源具有重要意义。火星探测代表了行星际太空探索和技术的顶峰,是未来深空探测领域的最大热点,也是各个航天大国行星探测的首个目标。美国和欧盟都宣布计划2030年左右实现载人登火,而我国也明确指出在2020年左右完成对火星无人探测的环绕、着陆与巡视三个任务指标[1]。
火星探测器的安全着陆是探测任务完成最为重要的保障,然而技术难度极高,在以往的火星着陆任务中成功次数不足一半。因此探测器进入、下降、着陆(Entry, Decent, Landing,EDL)过程是未来火星探测任务的关键技术之一,而大气进入段的环境最为恶劣,受到火星大气模型不确定、气动环境复杂、强非线性、强耦合等问题的影响,对着陆精度的影响很大。为了提高探测器在有较高科学价值的特定区域精确着陆的能力,可以利用文献[2]中总结的自主导航方法的优势,在进入段对火星探测器进行制导策略的设计。进入制导包括纵向制导和横向制导,纵向制导是更为重要的方面,目前这个阶段制导律设计主要有两种方法:标称轨迹制导法和预测校正制导法[3]。标称轨迹法就是事先按照要求设计好一条标称轨迹,存储在器载计算机中,然后根据实时跟踪误差设计制导律来跟踪这条轨迹。预测校正法是在每个制导周期内根据当前状态预测出终端状态值,与期望值对比产生误差信号,最后通过控制器生成控制信号实现对飞行轨迹的控制。这两种方法各有利弊,前者算法简单易于实现,但其对初始误差和外部扰动敏感而造成该方法的制导精度较低,需要高性能的控制器去改善缺点。后者较前者对外界干扰具有更好的自适应能力,但其预测过程依赖于精确的动力学模型。尽管预测校正法的制导精度更高,但由于模型精度不高以及器载计算机性能很难满足计算要求,导致这种方法很难在工程实际中得到有效应用。因此标称轨迹法仍然是近年来火星探测任务设计中优先考虑的方法,所以进一步提高其自适应能力和鲁棒性尤为重要。阻力加速度跟踪方法是一种很成熟的标称轨迹制导法,在航天飞机和好奇者号任务中都得到成功应用。航天飞机中采用了传统的比例、积分、微分控制方法[4],虽然技术比较成熟,但是在一些线性假设条件下求得的,且增益系数的整定比较麻烦。文献[5]运用反馈线性化(Feedback Linearization, FL)方法设计了标称轨迹跟踪控制,证明了该方法的优越性。文献[6]设计了对低升阻比航天器适用的鲁棒制导律。文献[7]运用了非线性预测控制的方法设计跟踪控制器,提高了制导精度,但增大了计算负担。文献[8]对于火星大气进入段轨迹跟踪控制,设计了基于连续有限时间滑模控制器,具有较高的鲁棒性。文献[9]利用滑模控制方法来消除有界扰动的影响,并利用基于径向基函数神经网络方法用来逼近未知扰动。文献[10]为了减小大气密度和空气动力学系数的有界误差的影响,使用了基于命令生成跟踪器的模型参考自适应方法。文献[11]结合轨迹在线更新策略和动态逆方法,给出了一种再入飞行器闭环稳定的鲁棒跟踪方法。文献[12]针对再入飞行器设计了具有前向补偿的制导控制一体化系统,具有良好的制导性能和鲁棒性。
预测-校正制导算法需要精确的动力学模型来预测最终的状态变量,而由于火星大气环境的复杂多变,存在各种不确定性,难以得到精确的模型,限制了这种方法的应用。故本文采用经典的基于阻力加速度跟踪的标称轨迹制导方法。反馈线性化方法在解决非线性系统控制律设计方面表现出了一定的优越性,但不确定因素很大程度上影响了其在进入制导段的跟踪效果。虽然非线性预测控制和基于神经网络的控制方法能有效提高制导精度,但其计算量较大,器载计算机处理能力有限,所以在实际应用中存在一定的困难。由于滑动模态控制(Sliding Mode Control, SMC)对系统参数变化及扰动不灵敏,具有较强的鲁棒性,而且控制器设计简单易于实现,可靠性较高,因此,本文基于反馈线性化的思想,设计了一种将滑模控制与扩张状态观测器(Extended State Observer, ESO)结合的方法来得出跟踪制导律,可利用观测器估计出系统模型不确定性导致的总体误差,并对控制系统实时进行补偿,以得到更加精确有效的控制量,减小跟踪误差。
1 系统建模
1.1 动力学建模
本文将火星探测器看作一个质点,在整个大气进入过程中,只受到气动力和火星引力的作用,且探测器的质量恒定不变。本文采用双锥体探测器外部构型[13],使质心偏离对称中心轴线来获得升力,通过改变升力的大小或调整升力的方向来控制探测器的飞行轨迹。探测器的受力示意图如图1所示,O为探测器质心,R为作用在探测器上的气动力,可分解为气动升力L和气动阻力D。G为火星的引力。飞行过程中配平攻角为15°,并假设无侧滑角。σ为滚转角,即探测器关于速度矢量的转动角,Lx(Lsinσ)为升力沿着横向的分量,Ly(Lcosσ)为纵向分量。通过改变探测器滚转角的大小可以调整纵向分量的大小,从而改变其纵向运动。滚转角的符号并不影响纵向分量的大小,故可通过改变滚转角的符号对探测器的横向运动进行控制。

(a)侧面
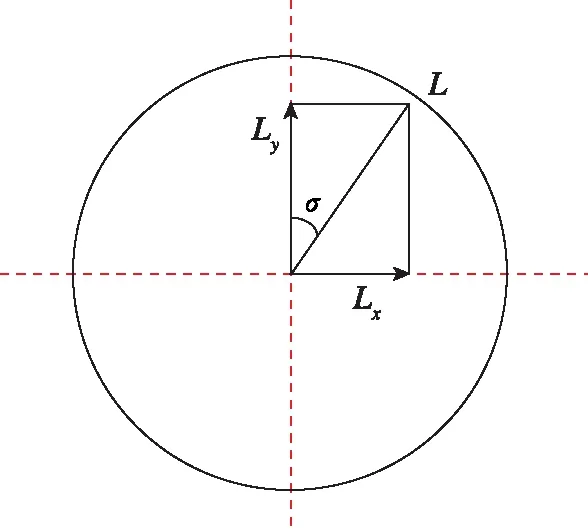
(b)背面图1 探测器受力示意图Fig.1 Force acting on the probe
为了简化运动方程计算,将火星看作一个标准球体,且不考虑其自转及表面风力的影响。基于三自由度的火星大气进入段动力学模型如下式
(1)
式中,r为探测器质心到火星质心的距离,V为探测器速度,φ为纬度,θ为经度。γ是飞行路径角,即速度和当地水平面的夹角。ψ是飞行方向角,即速度在水平面上的投影和正东方向之间的夹角。g为重力加速度,为了便于计算,L和D重新定义为气动升力加速度和阻力加速度,可由式(2)计算得到,
(2)
其中m=2802kg为探测器质量,S=15.9m2为探测器参考面积。升力系数CL和阻力系数CD为气动系数,升阻比CL/CD小于0.25。本文采用简化的指数大气密度模型,
(3)
其中ρ为高度h=r-r0处的大气密度,r0=3396.2km为火星半径,hs为火星高度参数,取9354m,ρ0为火星表面的标准大气密度,取0.0158kg/m3。
1.2 动力学分析
因为在进入大气过程中,探测器处于无动力飞行状态,满足能量守恒定律,其能量可以由下式表示
(4)

(5)
其中Ei为初始能量,Ef为终端能量。标准能量取值范围为0到1。
由航程的定义知,当以时间为变量时,探测器航程只与速度有关。而由能量变化率可知,当以能量作为自变量时,探测器的航程由阻力加速度的大小唯一确定,所以只要能够跟踪上探测器的阻力加速度,就能跟踪其轨迹路线,这就将轨迹跟踪的问题转化为了阻力加速度跟踪的问题。故本文以阻力加速度作为跟踪变量,以标准能量作为自变量进行探测器运动状态的分析。
2 制导律设计
进入制导策略包括纵向制导和横向制导。由于假设攻角为配平攻角,故两个通道均是将滚转角作为唯一的控制变量。为了实现纵向制导和横向制导的解耦,分别采用控制滚转角大小和符号的策略。滚转角的大小直接与探测器升力在纵平面的投影相关,而其符号则会改变探测器的航向,所以纵向制导策略就是通过控制滚转角的大小来调整纵程,横向制导策略则是通过改变滚转角的符号来修正探测器的横程偏差。
2.1 纵向制导律设计
根据前文可知,纵向制导采用跟踪阻力加速度的方法,因控制变量为滚转角,首先要得到阻力加速度和滚转角的显性关系。由式(1)和式(2)计算出阻力加速度的一阶导,如下式所示
(6)
继续对上式求导,得阻力加速度二阶导和滚转角的关系式
(7)
其中u=cosσ,a和b是各状态量的非线性函数形式,如下式
(8)
(9)
由式(7)可知,对阻力加速度求二阶导后,表达式中显含控制量u,所以系统相对阶数为2,可用下式表示

(10)
其中D的一阶和二阶导数为状态变量,输入变量为u,输出变量为D。
考虑到在实际大气进入时存在模型误差,记气动系数误差为ΔCL、ΔCD,大气密度误差为Δρ,则实际阻力加速度和升力加速度可由下式得到
(11)
(12)
将Ds,Ls代入表达式(8)和(9)中得非线性函数a和b的实际值as=a+Δa,bs=b+Δb。则式(10)可写成
=a+Δa+(b+Δb)u=a+bu+Δa+Δbu
(13)
由于文献[14]中只将as作为不确定量,没有考虑第二项bsu的影响,所以本文更进一步地令受控系统的总不确定量为Δa+Δbu=w(t),则控制系统可写成
(14)
(15)
对系统(15)利用直接反馈线性化理论,其基本思路就是选择虚拟控制量,从而抵消原系统中的非线性因素, 使系统实现线性化。把式(14)右边用一个函数N代表,即
a+bu+w(t)=N(t)
(16)
那么相对于输入量N,非线性系统(15)就转化成了一个线性受控系统
(17)
N就称为原系统的虚拟控制输入量,可按照线性系统控制律设计方法求出。
控制系统的目的是调整控制量u使输出变量阻力加速度Ds能够跟踪上期望的阻力加速度Dr,定义跟踪误差
(18)

(19)
对于系统(19),定义滑模面
s=c1e1+c2e2
(20)
利用二次型性能指标最优法[15]选取滑模面系数c1、c2。首先将方程写成如下状态空间形式
(21)
可知系统满足可控性。式(21)的二次型最优性能指标为

(22)
eTQe=e1Q11e1+e2Q21e1+e1Q12e2+e2Q22e2
(23)

(24)
则性能指标变为
(25)
且有如下方程
(26)
其中
(27)
故可得
(A12P+Q12)e1+Q22e2=0
(28)
由此可取滑模面系数c1=A12P+Q12、c2=Q22。选取合适的Q阵,得c1=0.05、c2=1。
为改善滑模控制系统到达段的品质,采用如下趋近律
(29)
选取合适的参数α可保证当系统状态远离滑动模态即滑模面s时,能以较大速度趋近于滑模面,系统状态趋近于滑模面时,能保持较小的控制增益,有效降低抖振。这里其值取为0.85。参数k取为0.038。
下面证明控制律的稳定性。取李雅普诺夫函数Vs=s2/2,显然在原点邻域内Vs>0,且
(30)

由式(20)和式(29)可得出,
=-k|s|αsgn(s)
(31)
结合式(17)可得虚拟控制输入量N的表达式
(32)
代入式(16)可得控制律

(33)
式中a和b由式(8)和(9)计算得到。
对于式(33)中的未知不确定量w(t),本文通过设置一个扩张状态观测器对其数值大小进行估计,实现对控制系统的动态补偿。将不确定量看作一个未知状态变量x3,其导数为h(t),则控制系统(15)变换为
(34)
由于传统的利用非线性函数设计的ESO参数较多,且其整定大多依靠经验,故本文采用只有一个可调参数的线性扩张状态观测器(Linear Extended State Observer, LESO),利于实际工程应用[16]。其三阶形式如下
(35)
其中z1和z2为对状态变量x1和x2的估计量,z3为对不确定量w(t)的估计量。eo1为观测误差,l1,l2,l3为观测器增益。下面给出增益系数的整定方法,令式(35)减去式(34)得,
(36)
令状态误差向量eo=[eo1,eo2,eo3]T,则有
(37)

如果矩阵Ao的特征值全部在左半复平面,且h(t)是有界的,则可使系统(36)均对原点稳定,LESO就能跟踪式(34)中的扩张状态。这里不确定量w(t)及其导数h(t)都是有界的。将Ao的特征值全部设为-ωo,则其特征方程与期望的特征多项式相等,即
λo(s)=|sI-Ao|=(s+ωo)3
(38)
最后将利用LESO得到的对未知不确定量的估计值z3代入控制输入u中,即引入相应补偿,抑制模型参数不确定变化导致的影响,最终得到纵向制导律为

(39)
2.2 横向制导律设计
由第一章动力学模型可知,通过改变滚转角符号,Lx(Lsinσ)的符号也随之反转,探测器的升力指向纵平面的另一侧,这样探测器的航向角速度便会反向。本文横向制导律的设计就是根据这个特点,设计一个与探测器横向运动有关的边界区间,使探测器在此区间范围内飞行,当横程超出边界时,滚转角反号,调整横向运动,使得探测器到达开伞点的横向距离偏差尽可能小。本文设计的横向制导律如下
(40)

(41)

3 仿真结果及分析
本节采用第一节给出的结构参数及动力学模型(1)进行仿真计算。仿真的初始条件和开伞点参数参考文献[18]。具体数据如下表1和表2所示。
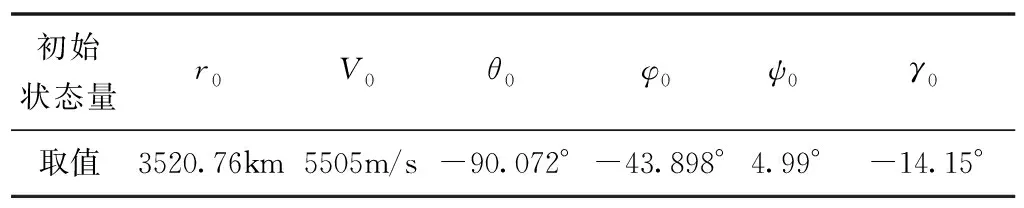
表1 仿真初始参数

表2 终端参数
根据开伞之后着陆段的初始状态要求,当探测器速度达到400m/s或飞行高度低于8km时,探测器降落伞打开,此时大气进入段制导过程结束。
将本文基于反馈线性化理论的滑模控制与LESO结合的方法与文献[18]给出的反馈线性化方法进行仿真对比,两种方法的横向制导均采用本文设计的制导律。首先在无模型不确定性情况下分别用两种方法进行仿真。如图2所示为阻力加速度跟踪曲线,图3为探测器经纬度曲线,根据具体结果可计算得反馈线性化方法的最终开伞点位置偏差为770m,本文方法的偏差为451m,这表明在不存在模型误差的情况下,两种方法均能实现对参考轨迹的良好跟踪。

图2 阻力加速度曲线Fig.2 Drag acceleration profile
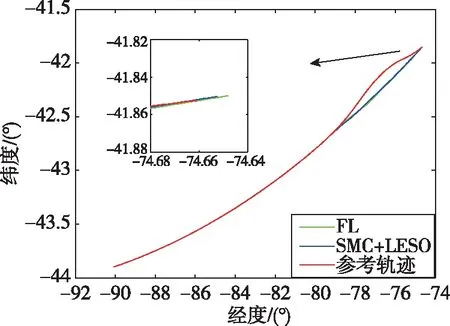
图3 经纬度曲线 Fig.3 Latitude and longitude profile
由于在实际火星大气进入段存在着模型不确定性,对制导精度有重要影响,所以通过人为施加误差,将两种方法进行仿真对比,来验证本文设计的纵向制导律有更好的鲁棒性。本文假设的误差如下表3所示。

表3 模型误差
在存在模型误差即气动系数误差及大气密度误差的情况下,利用上述两种方法对标准轨迹进行跟踪。由于事先已经知道施加的参数误差大小,故可通过模型计算出总体误差量的大小,与实际对不确定量w(t)的估计值进行对比来评估观测器的观测效果。
首先考虑气动正拉偏的情况,从阻力加速度跟踪结果图4看出,在整个进入阶段,本文方法设计的纵向制导律对阻力加速度的跟踪效果优于反馈线性化方法。仿真结果图5和图6分别是滚转角变化曲线和漏斗边界,从图中能够看出,在横 向制导律的作用下,探测器的滚转角在大气进入过程中进行了数次变号,调整横向运动方向,使得探测器在漏斗区间内飞行,能够保证最终横程误差在很小范围内。探测器飞行高度变化曲线如图7所示,两种方法的最终开伞点位置的高度均大于8km,满足终端条件约束。图8所示的经纬度曲线表明,相比于反馈线性化方法,利用SMC结合LESO方法的探测器最终开伞点经纬度位置离期望点更近,精度明显更高。图9为LESO对未知不确定量的估计曲线,与实际误差量进行对比,能够看出观测器变量z3的估计误差较小,观测器表现出了良好的性能。

图4 阻力加速度曲线Fig.4 Drag acceleration profile

图5 滚转角曲线Fig.5 Bank angle profile

图6 漏斗边界Fig.6 Funnel boundary
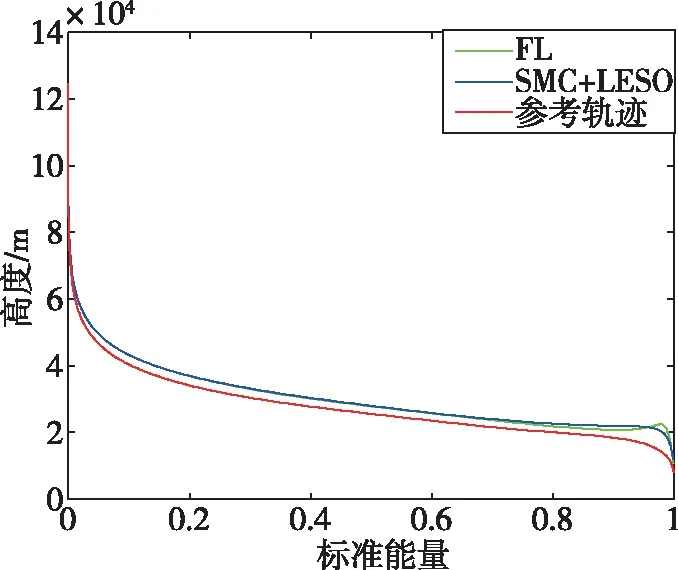
图7 高度曲线Fig.7 Altitude profile

图8 经纬度曲线 Fig.8 Latitude and longitude profile
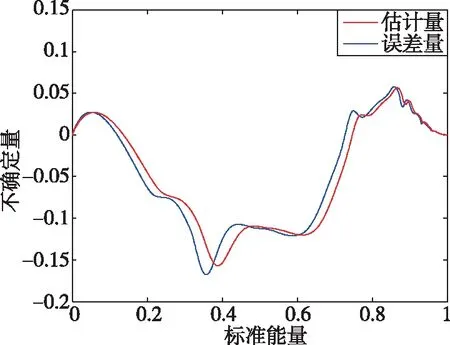
图9 LESO估计曲线Fig.9 LESO estimation profile
在气动负拉偏情况下的阻力加速度跟踪效果如图10所示。可以看出,相比反馈线性化方法,本文方法的跟踪效果同样更好。

图10 阻力加速度曲线Fig.10 Drag acceleration profile
存在模型误差情况下,开伞点位置的具体仿真结果对比如表4所示。
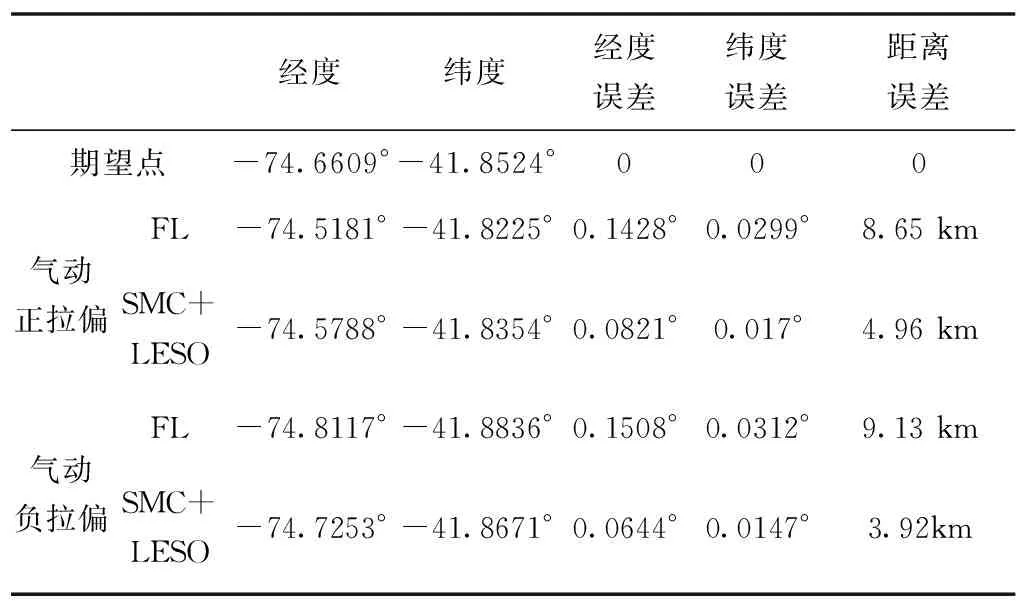
表4 仿真结果
以上仿真结果的对比表明,在存在模型误差的情况下,反馈线性化方法对参数变化比较敏感,制导精度不高。本文设计的方法在纵向制导方面具有更优越的抗不确定性干扰能力,结合横向制导律的作用,表现出很好的轨迹跟踪效果,使得开伞点误差保持在较小的范围。
4 结 论
本文针对火星探测器大气进入段,利用直接反馈线性化理论对跟踪模型进行线性化,设计了一种滑动模态控制结合线性扩张状态观测器的纵向跟踪制导律,利用滑模控制方法鲁棒性较高的特点以及通过对不确定量进行实时补偿来提高制导精度。此外,还给出了横向制导律以减小探测器的横向偏差。在存在气动参数和大气密度误差的情况下进行仿真,并与反馈线性化方法进行比较,仿真结果表明,观测器实现了对不确定量的良好估计并实时对滑模控制律进行精确补偿,增强了制导律对模型参数不确定性的鲁棒性,使得开伞点位置精度更高。故所设计的制导方法有效地改善了探测器大气进入阶段的制导性能,从而减小了开伞点偏差,并为探测器最终安全着陆到预期位置提供了保障。
