面向林用机器人的无线充电装置研究*
2019-09-07钟天慈赵学伟胡晨阳颜梦玲
钟天慈,徐 磊,赵学伟,周 正,胡晨阳,颜梦玲
(南京林业大学信息科学技术学院,江苏 南京 210037)
0 引言
森林作业机器人一直是国内外机器人研究的热点之一,随着研究的不断深入,机器人的续航工作能力也越来越受到重视[1]。
目前大多数林业机器人使用蓄电池进行供电,电量可维持数小时,电量耗尽便需要人工干预进行充电,无法长久地在森林中自主工作。而且机器人在进行林区巡检等长时间工作时无法及时充电,不能满足林业管理自动化和智能化的需求。
直接在机器人上装设太阳能帆板能够延长机器人工作时间,使其更加长久稳定的工作。但由于林用机器人主要工作地点在林区,树木遮挡导致太阳能利用率不高。
当前市面上许多自主充电机器人采用接触式充电,如家用扫地机器人等。这类机器人通常借助激光测距仪、视觉传感或红外探测器与充电设备进行对接,机器人在充电前,需要经过导航到达充电插座,由于传感器的误差,导航精度较低[2]。机器人与充电底座对接时需要通过导航算法来提高对接的精确性,对接过程比较复杂,消耗时间较长,不能快速准确进入充电状态。而且充电底座在多次进行插
拔对接充电后,容易引起机械磨损,导致插头松动。因而接触式充电比较适合于室内简单场景。而无线充电技术作为一项新的能量传输技术,用电设备以非接触方式取电,无需进行精确对接,所以研究林用机器人的无线充电技术能够促进林业管理的智能化和自动化发展。
1 系统总体方案设计
现阶段,无线电能传输主要包括三类:微波电能传输、电磁感应式传输、电磁谐振式传输[3]。结合林用移动机器人的特点,选用电磁谐振的传输方式进行无线充电。电磁谐振式无线充电利用发射线圈和接收线圈间的耦合,实现电能传输。该传输方式传输距离远,传输效率高[3]。
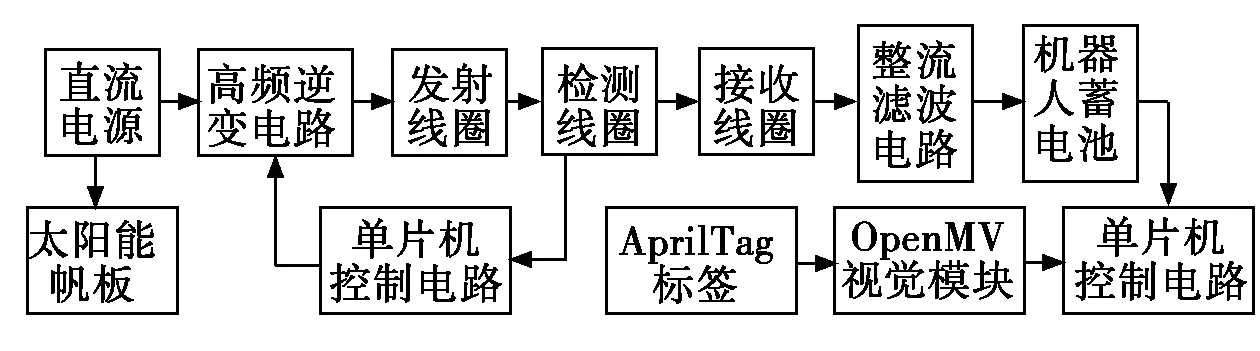
图1 系统框图
系统框图如图1所示,无线充电系统包括发射端和接收端,接收端位于林用机器人底部,通过接收线圈和整流滤波电路为蓄电池充电。
发射端包括直流电源、高频逆变电路、发射线圈和检测线圈。检测线圈用于检测充电区是否存在金属异物。另外,发射端装置架设太阳能帆板,收集林区太阳能,对发射端直流电源的电能进行补充,延长单次使用时间,使得机器人能够较长时间地在林区自主工作。有效利用林区太阳能,绿色环保。
2 硬件电路设计
本研究所要采用的是谐振无线电能传输,该无线电能传输方式的特点是具有相同谐振频率的物体之间可以产生高效率的电能传输,而不同谐振频率的物体之间电能传输的效率则相对较低。磁耦合谐振无线电能传输系统分为发射端与接收端,总共由五个部分组成,分别是高频逆变电路、发射线圈、接收线圈、整流滤波电路、负载[4]。
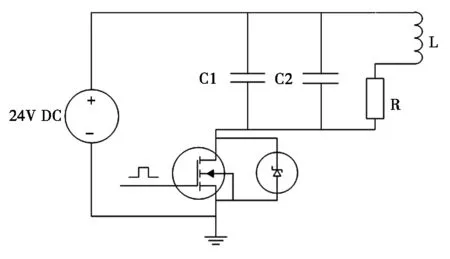
图2 高频逆变电路
该电能传输系统的原理是首先通过高频逆变电路将输入的直流电逆变为高频的交流电,再通过发射线圈与接收线圈将交流电传输到接收端,完成电能的无线传输,再经过整流滤波电路将接收线圈接收到的高频交流电转换成负载所需要的直流电,从而使负载获取到电能,达到充电的效果。
本研究所采用的高频逆变电路如图2所示。发射端控制芯片采用STC15W4K32S4型号单片机。单片机的P1.1管脚与MOS管的栅极相连。通过单片机内硬件PWM波发生器产生PWM波,作为逆变电路的驱动信号,可以通过控制PWM波的占空比,实现对产生高频交流电频率的控制。
整流滤波采用全桥整流电路,由4只整流二极管按全波整流的方式连接起来,将接收到的高频交流电转化成负载可以接收的直流电。
3 系统软件流程设计
3.1 对位检测
林用机器人在电量不足的情况下,根据GPS导航定位,寻找最近的充电点进行充电。无线充电的效率和功率受对位偏差的影响,为了提高充电效率,需要进行线圈对位操作来提高耦合系数。在林用机器人到达充电点附近后,使用OpenMV视觉模块的AprilTag标记跟踪功能进行定位,引导机器人进入充电区。
OpenMV是一个基于STM32F765VI ARM Cortex M7处理器的单片机和OV2640图像传感器的开源型的微型机器视觉模。OpenMV上搭载了一个MicroPython解释器,使用Python脚本语言编程来实现一系列功能,包括IO端口的控制、读取文件系统等基础功能,也可以实现人脸检测和跟踪、关键点提取、颜色跟踪等功能。AprilTag是一个视觉基准系统,可用于各种任务,包括AR,机器人和相机校准[5]。
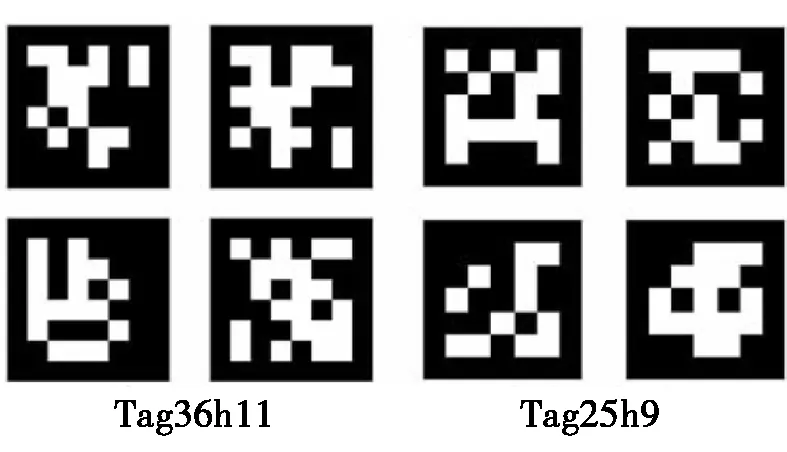
图3 Tag标记
OpenMV中的AprilTag检测程序可以计算图3的Tag标记相对于相机的精确3D位置、方向,通过串口输出6个变量,Tx、Ty、Tz为空间的3个位置量,Rx、Ry、Rz为3个旋转量。
AprilTag可以识别每个标记的ID。例如TAG16H5的家族(family)有30个,每一个都有对应的ID,从0-29。不同家族的区别在于有效区域的范围不同。TAG16H5的有效区域是4×4的方块,而TAG36H11有6×6个方块。TAG16H5相较于TAG36H11远距离仍能有效识别,但TAG16H5的错误率比TAG36H11高。所以本研究使用TAG36H11对充电装置进行标记。
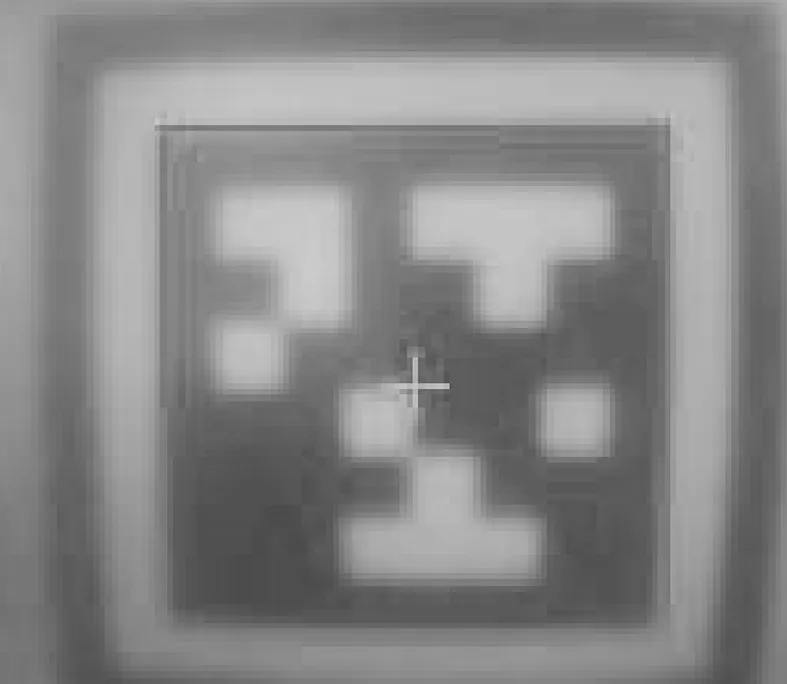
图4 摄像头读取标记
图4是OpenMV读取测试选用的Tag标记,测试选用的标记为TAG36H11-2。OpenMV通过串口与机器人主控芯片通信,将6维向量传给主控。读取标记的结果为:ID=2,Tx=-0.287775,Ty=-0.701307,Tz=-3.420411,Rx=180.521240,Ry=6.332906,Rz=358.060122,位置T的单位为厘米,姿态R的单位为角度。
机器人主控发送指令控制步进电机,使用PID算法调整机器人位置和姿态。当主控收到的6维向量达到某阈值后,即判定机器人已经进入无线充电区,完成对位检测。对位检测流程如图5所示。
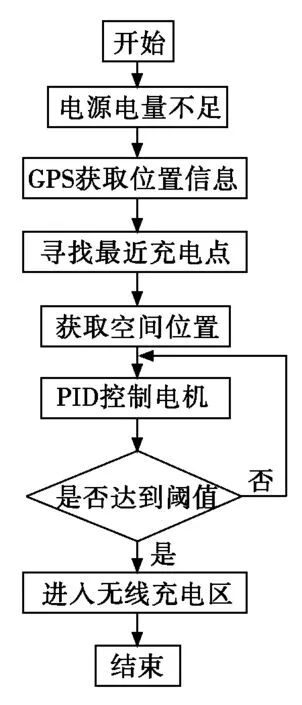
图5 对位检测流程
3.2 异物检测
在无线充电的过程中,各种异物进入电能的传输区域是不可避免的。可将异物大致分为金属异物和非金属异物。非金属异物对无线电能传输系统并不会产生影响;而金属异物则会带来较大的影响,可能会影响电能的传输效率,同时涡流效应引起金属异物温度急剧升高,容易引发火灾,而这在林区更会造成无法预计的严重后果。因此,出于系统安全考虑,本研究中无线充电系统的异物检测是十分必要的。
铁磁性金属磁导率远大于1,远远大于空气介质的磁导率。当磁场中存在铁磁材料,原磁场的大小会受到铁磁材料的影响而发生变化,称之为铁磁材料的磁效应。在变化的磁场当中,对于铁磁性金属导体,除了涡流效应会改变原磁场,其磁效应亦能引起原磁场的变化。由于金属的涡流效应和磁效应,当金属异物进入电能传输区域时,会引起原磁场大小的变化。可以根据此特性作为金属异物检测的依据,采取事前检测的方法对充电区有无异物进行检测。
金属异物将会改变原磁场的大小,从而改变磁场中平衡线圈所感应的不平衡电压的大小。经试验检测可知,当存在金属异物时,平衡线圈的端电压将会减小,因此可以对平衡线圈端电压进行实时检测,进而检测有无金属异物进入电能传输区域。异物检测流程如图6所示。
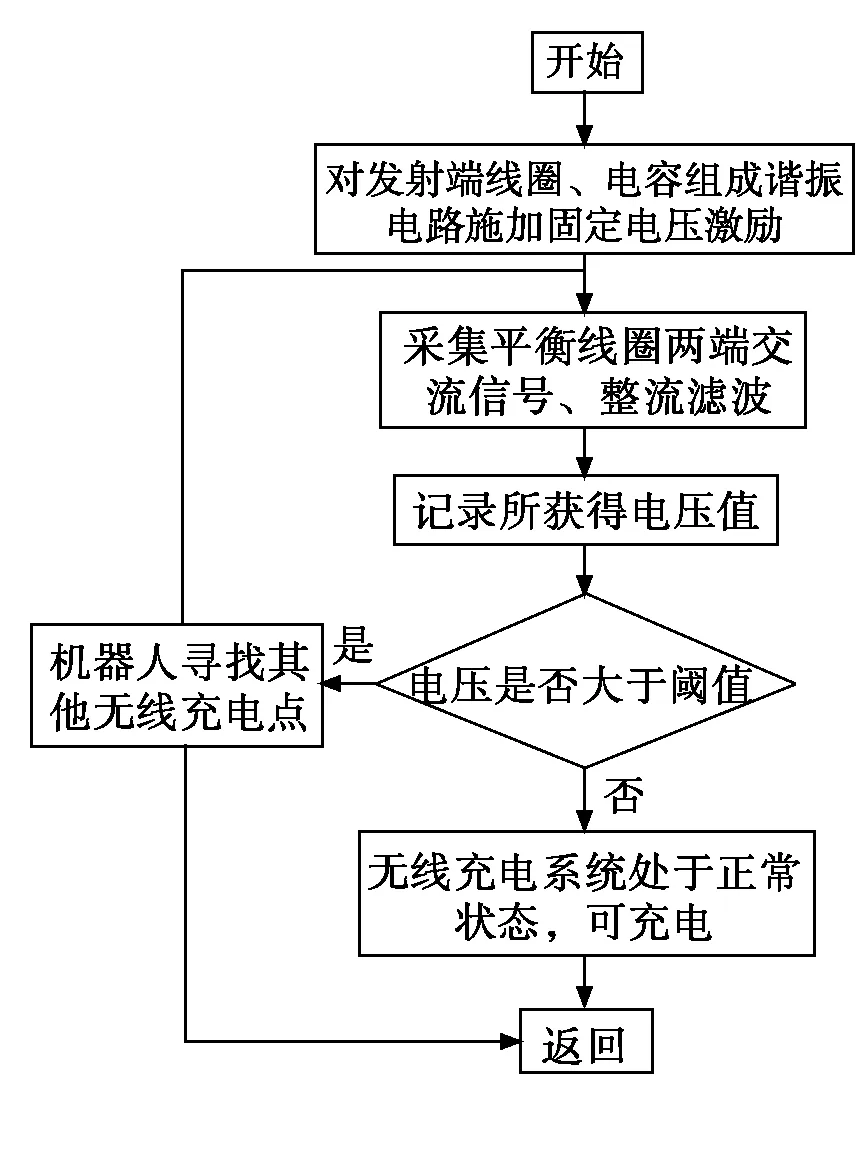
图6 异物检测流程
4 实验结果
本研究设计的无线充电系统能够快速进入充电状态,有效检测出充电区异物,保证系统安全性。实验结果证明,该系统能够准确将林用机器人和无线充电装置进行对位,无线充电效率较高。
5 结论
电磁谐振式无线充电在提升机器人智能化和自主化方面具有很大的潜力,相较于传统接触式充电更加安全、便捷。加入检测线圈的方法进行异物检测的方案可行,且稳定性较好。