隧道智能巡检机器人的控制软件研究
2019-09-05程贝贝
程贝贝


摘要:以自主研发的基于嵌入式系统的隧道智能巡检机器人为执行机构,工控机为处理中枢,通过无线网络,实现隧道智能巡检机器人的运动控制、实时图像查看、隧道内气体监控、温湿度监控等功能,隧道智能巡检机器人控制软件的实现,是其完成巡检任务的必备要素,软件的完成为后续的远程控制、自动化监控、智能控制打下了重要基础。
关键词:巡检机器人;自动控制;远程监控
中图分类号:TH123 文献标识码: A
Abstract: The self-developed tunnel-based intelligent inspection robot based on embedded system is the execution mechanism, and the industrial computer is the processing center. Through the wireless network, the motion control, real-time image viewing, gas monitoring in the tunnel, temperature and humidity monitoring of the tunnel intelligent inspection robot are realized. Such functions, the realization of the tunnel intelligent inspection robot control software is an essential element for the completion of the inspection task. The completion of the software lays an important foundation for the subsequent remote control, automatic monitoring and intelligent control.
Key words: Inspection Robot; Automatic Control;Remote Monitoring
近年來,多次发生大型的电缆隧道火灾、高压电缆积水短路、电力隧道设施被盗等事故,事故发生后,影响范围广,修复时间长,社会经济损失高达百亿元,电力隧道封闭的空间导致隧道灭火救援亦成为难题。人工巡检需要耗费大量的人力和时间,且十分危险,应用机器人技术进行电力隧道内自动实时监测、巡检以及事故应急处置将解决以上诸多问题。
1通信协议
以自主研发的基于嵌入式系统的隧道智能巡检机器人为执行机构,工控机为处理中枢,通过无线网络,实现隧道智能巡检机器人的运动控制、实时图像查看、隧道内气体监控、温湿度监控,工控机软件与机器人通信协议如表1-1所示,在协议中规定了机器人需要上传的各参数所用的命令头及命令举例。通过交换数据,实现工控机对机器人的控制,及机器人采集数据的回传。
2网络架构
3软件设计
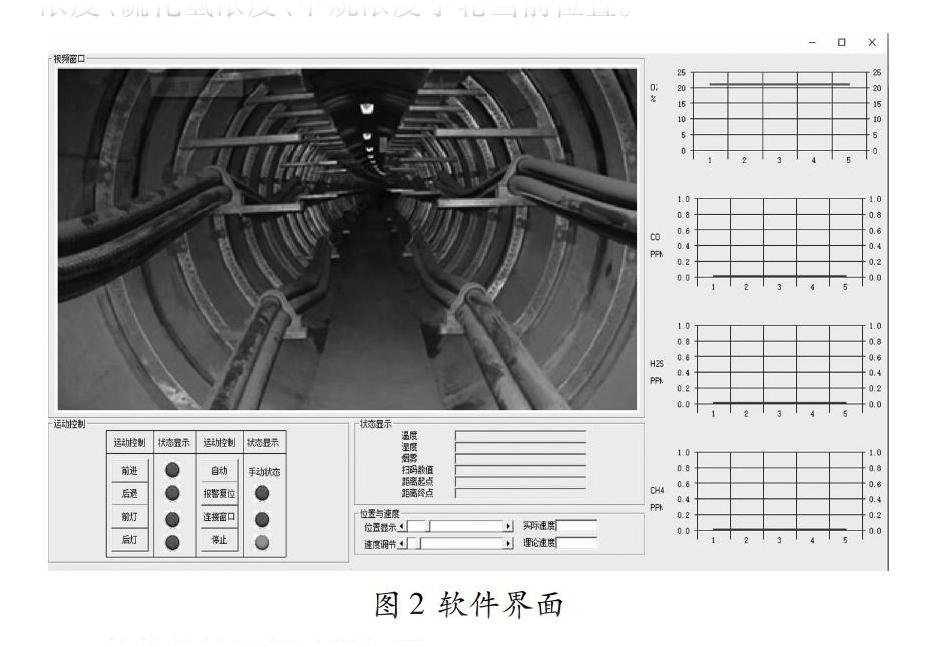
在软件界面可以实时控制和显示机器人的运行状态,包括前进、后退、前灯、后灯、自动状态、报警复位、停止状态;实时显示当前机器人监控视频图像,机器人位置,氧气浓度,一氧化碳浓度、硫化氢浓度、甲烷浓度手轮当前位置。
4结论
隧道智能巡检机器人控制软件的实现,是其完成巡检任务的必备要素,软件的完成为后续的远程控制、自动化监控、智能控制打下了重要基础。
参考文献
[1]段晓东.变电站巡检机器人运动控制系统设计与实现[D].北华航天工业学院,2019.
[2]鲁浩,谈英姿.管廊巡检机器人控制系统设计与实现[J].自动化技术与应用,2019,38(02):78-82+86.
[3]陈鸣.巡检机器人控制系统整体软件设计[J].科学技术创新,2018(11):65-66.
[4]吴伟.高压电缆隧道智能巡检机器人控制系统研发[D].天津职业技术师范大学,2016.
