基于毫米波雷达的多旋翼无人机避障技术研究
2019-09-03潘枭王伟华锡焱房德国
潘枭,王伟,华锡焱,房德国
(南京信息工程大学 自动化学院,南京210044)
1 引言
无人机的出现,实现了地面向天空的变革。近年来,人们利用无人机进行电力巡检、运输物流、航拍等重大活动,又因无人机避障技术的发展,使得无人机逐步摆脱传统“飞手”对飞机的实时操纵,这便给整个无人机市场带来了巨大的变革。目前,无人机主要依靠机载避障传感器来识别环境中的障碍物。在我国无人机避障的传感器主要可以划分为被动式和主动式两大类。其中,被动式感知环境的传感器主要采用的是CMOS 和CCD 等光学传感器[1],主动式感知环境的传感器主要有超声波传感器、激光雷达、毫米波雷达等。超声波避障技术主要是采用超声波获得无人机的飞行环境信息,对障碍物的距离、方向、角度等进行判断。利用了声波反射测距原理,该方法的优点就是技术成熟,成本很低,但缺点在于作用距离近。激光雷达传感器可以获取飞行环境信息,然后再通过对障碍物的距离、角度等信息进行计算。激光雷达与超声波传感器相比,前者测量距离远、方向性好、精度高、抗干扰力强,但价格昂贵,成本高,遇恶劣天气时性能会严重下降。相比较之下,毫米波雷达传感器具有体积小、功耗低、作用距离远、穿透雾、烟、灰尘能力强,因而毫米波雷达已经较为广泛地运用于各行各业[2]。本文介绍了一种基于毫米波雷达的多旋翼无人机避障技术研究的工程设计方案,计算量小,效果显著,在小型多旋翼无人机的市场应用上具有很大的潜力。
2 系统组成
多旋翼无人机上搭载了IMU、GPS、地磁、毫米波雷达等传感器系统,另机载无人机控制核心飞控模块,用于记录多旋翼无人机飞行实时数据的数据模块。IMU 传感器内置加速度计、陀螺仪、气压计。陀螺仪测得的角速度信息、加速度计测得的加速度信息以及气压计测得的高度信息传送给飞控,由飞行计算机计算出从机体坐标系到参考坐标系之间的转换矩阵,再通过这个矩阵把三轴加速度分量从机体坐标系转移到参考坐标系上,通过积分计算出速度和位移,再将速度和位移与辅助导航系统(GPS 传感器和气压计传感器)的数据进行比较。在这个过程中可以利用转换矩阵进行无人机的姿态角解算,从而能够准确得出无人飞行器的速度和位置。基于无人机有一个稳定可靠的飞控系统后,为增添无人机智能飞行的可实施性,需机载避障传感器。本文介绍的基于毫米波雷达的多旋翼无人机避障技术研究主要使用的是毫米波雷达传感器,机载各个传感器通过CAN 通信方式与飞控进行数据传输。
3 障碍物探测硬件设计
3.1 毫米波雷达及其探测原理
毫米波雷达,指工作在毫米波频段的雷达。毫米波是一种波长在1~10mm,频域在30~300GHz 的电磁波。雷达一般工作模式分为Pulsed(脉冲方式)和FMCW 调频连续波方式[3]。脉冲工作方式往往要求雷达在很短时间里发射大功率的信号脉冲,硬件上收发天线往往是共用的,这样便会容易导致出现探测盲区。连续波雷达是发射连续波信号,主要用来测目标的速度。调频连续波方式,能够同时测量目标的距离,对比脉冲工作方式的硬件,其收发天线中间会有一定的间隔,基本不存在探测盲区。针对FMCW 方式,虽然发射频率不断改变,但是频率变化率保持不变,只需对发射和反射回来的信号做互相关,通过检测这个频率差fb和频移fd,推算出距离和速度。公式如下:
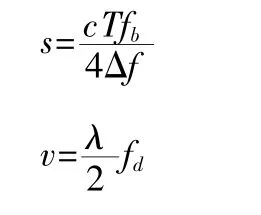
式中:s 为距离,v 为速度,c 为光速,T 为信号发射周期,Δf为调频带宽,fb为差拍频率,λ 为信号波长,fd为多普勒频移。
3.2 硬件连接
本设计选用的是一款莫之比有限公司的避障雷达传感器,77GHz 毫米波避障雷达,雷达波束窄,能量居中,可减少无人机倾斜姿态工作时的地杂波干扰,抗干扰能力强:不受光线、天气、环境噪声影响,不受无人机电磁干扰的影响,能探测到35m 以外的障碍物。数据接口支持UART 和CAN 口两种方式。本设计采用的是CAN 口通信方式。需注意的是,此款雷达一旦探测距离无限远便输出负值。实物及飞机连接图如图1所示。毫米波雷直接通过CAN 将数据实时传给飞控,目标刷新频率为50Hz。

图1 实物及飞机连接图
4 软件设计
4.1 软件设计流程
无人机系统上电后开始进行自检,当飞机检测到机载所有传感器正常工作并且避障传感器毫米波雷达所探测到无人机前方无障碍物或者障碍物在安全距离内,无人机系统自检通过。无人机上位机软件对无人机进行打点操作。打点操作是为了对无人机进行路径规划,在无人机规划路径内人为地设置障碍物。无人机执行自主起飞操作后按规划轨迹飞行,障碍物在安全距离内,无人机按规划轨迹安全飞行。小于安全距离,无人机按指定策略避开障碍物后,重新会到原设定轨迹继续飞行,直至到达最终目标点。避障流程如图2 所示。
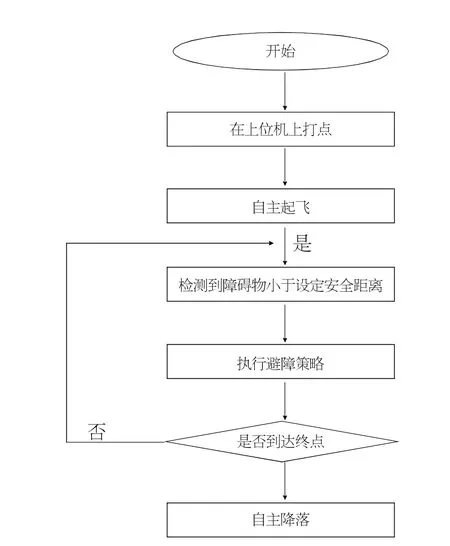
图2 避障流程图

图4 毫米波雷达探测距离
4.2 毫米波雷达避障策略
无人机起飞后毫米波雷达开始检测障碍物的距离,不断地对传给飞控的距离信息进行判断,如果距离信息大于飞控设定的安全距离20m(安全距离可以人为设定),无人机按照规划轨迹安全飞行,如果无人机雷达探测到障碍物距离小于20m 大于14m,无人机开始减速,飞行速度不大于3m/s,若探测到障碍物距离小于14m 且大于8m,飞机速度不大于1m/s。当距离小于8m,无人机停止前进,飞行速度降为0,悬停于空中,此时无人机开始做转头处理,为了进行后续解释,在此定义一个机体坐标系,它是一个正交的坐标系且符合右手螺旋定则,为了方便角度识别,定义机头的方向为X 轴正半轴,转头处理是以机头所在X 轴方向顺时针旋转90°,逆时针旋转90°,毫米波雷达在飞机转头的这一过程做距离探测,若检测到在无人机机头顺时针方向有障碍物则向逆时针进行躲避障碍物处理,反之,若检测到在无人机机头逆时针方向有障碍物则向顺时针进行躲避障碍物处理。躲避障碍物后重新回归初始设定轨迹继续飞行,并不断重复上述操作,直至无人机按照规定轨迹飞到最终目标点。
4.3 实验结果
无人机躲避障碍物上位机显示轨迹如图3 所示。A 点为无人机起飞点,B 点为无人机降落点。A、B 之间有两个障碍物,多旋翼无人机探测到障碍物并到达指定避障距离时,开始悬停做转头动作,然后按照上述避障策略执行避障,轨迹如图3 所示。可清楚地看见无人机在遇到第一个障碍物时向空旷的非障碍物侧避障,第二个障碍物同样如此。在绕过障碍物后,无人机继续按照规定轨迹飞行,直至到达最终目标点。毫米波雷达探测距离如图4 所示,无人机起飞时第一个障碍物距飞机大概在36m,无人机沿规划轨迹飞行,距障碍物距离越来越近,当距离小于8m 时停止飞行,执行避障,成功避障后回到初始设定轨迹,此时第二个障碍物距飞机大概30m,属于飞机安全飞行距离,无人机正常飞行,直至距第二个障碍物8m 时,执行避障,成功避障后回到原轨迹,继续飞行直至完成飞行任务。
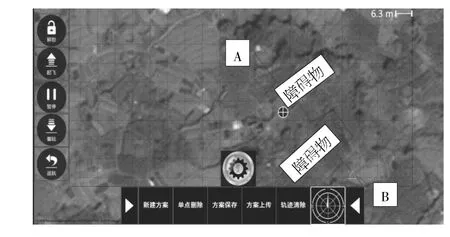
图3 无人机躲避障碍物上位机显示轨迹
5 结语
本文以多旋翼无人机为例,提供了一种基于毫米波雷达的多旋翼无人机避障技术研究方法,首先概述了系统机构,然后研究了避障传感器毫米波雷达的工作原理及连接方式以及软件设计方案和避障策略,最后给出本设计的实际实验结果。本方案已通过大量实验,对于多旋翼无人机避障研究具有重要意义,在无人机避障市场上具有很大的应用前景。
