一种履腿臂复合型变电站带电水冲洗机器人
2019-09-03肖建华方学智
肖建华 ,姜 勇 ,方学智 ,傅 博
(1.贵州电网有限责任公司凯里供电局,凯里 556000;2.中国科学院沈阳自动化研究所机器人学国家重点实验室,沈阳 110016;3.中国科学院机器人与智能制造创新研究院,沈阳 110016)
在线运行的绝缘子,在自然环境中,受到SO2、氮氧化物及颗粒性尘埃等大气环境的影响,在其表面逐渐沉积了一层污秽物。在天气干燥的情况下,这些绝缘子可以保持着较高的绝缘水平,其放电电压和洁净、干燥状态时接近;当遇有雾、露、雨等潮湿天气,以及融冰、融雪时,绝缘子因表面污秽物吸收水分致使污秽层中的电解质溶解,造成绝缘子绝缘水平降低,泄漏电流增大,严重时发生闪络事故。由于污秽而引起的绝缘闪络事故,在电力系统事故中仅次于雷害居第二位,然而污闪事故所造成的损失却是雷害事故的十几倍。全国各大电网几乎都发生过大面积污闪,造成了巨大的经济损失。绝缘子是配、变电设施中最基础的部件,绝缘子出现污秽是发生闪络事故的根源,绝缘子干净与否直接关系到供电的可靠性。故定期对配、变电设施上的绝缘子进行清污工作,是变电站必不可少的基本工作。
随着电网电压等级提高、系统容量增长,设备停电的机会越来越少、停电时间也越来越短。设备停电清污成为难于实现的措施,为及时清扫设备表面污秽,防止设备污闪事故,保证设备安全供电,带电水冲洗已经成为清污工作中一种普遍采用的有效手段。
目前,变电站带电水冲洗作业仍以人工方式为主,工人劳动强度大,危险性高,且受人员心理素质、业务水平、工作经验和精神状态等诸多因素的制约,清污效率差异性大,清污质量参差不齐。人工方式带电水冲洗作业已经满足不了现代化变电站安全运行的要求,采用机器人来代替人工作业是智能电网发展的必然趋势。
本文介绍了变电站带电水冲洗技术及相关设备的发展现状,研究提出了一种新型履腿臂复合型变电站带电水冲洗机器人,并分析了此类机器人的发展趋势。
1 变电站带电水冲洗的发展现状
国外对输、变电设备带电水冲洗的研究开展较早,发展很快。美国、加拿大、日本、俄罗斯、捷克及中东沙特、约旦等国在超高压输电线路及变电站带电水冲洗方面都有较广泛的研究与应用。带电水冲洗适用的电压等级已从交流110 kV线路扩展到交、直流的750 kV线路,从110 kV变电站扩展到500 kV变电站,以及配电网线路。
国内自20世纪80年代初开始对带电水冲洗技术进行系统的研究。1980年开始对110 kV及220kV水柱绝缘进行了研究,在此基础上提出水柱安全距离。1982和1983年又连续对110kV及220 kV被冲洗设备的绝缘进行研究。2000年以后,随着带电水冲洗设备技术的不断提高,带电水冲洗中水压和水电阻率比以往有了很大提高。部分高校和研究所也合作研制了一些新型的带电水冲洗设备。
按照带电水冲洗设备的结构特点,通常可分为固定式和移动式2种。固定式水冲洗是根据被冲洗绝缘子的尺寸和形状,在绝缘子周围设置能承受一定水压的固定管道和喷嘴,如图1所示。喷嘴的布置是按把变电站分割成几个区域,并且各个区域都能从上风侧到下风侧,从低处到高处逐一被清洗的原则来安装。这种方式需要在变电站敷设大量的管道和喷嘴,投资很大,一般在建造变电站时即完成敷设,作为变电站的永久防污闪措施。国外广泛采用这种方法,例如美国Florida Power&Light Co的变电站即采用固定水冲洗系统。

图1 固定式水冲洗设备Fig.1 Fixed water washing equipment
图2所示为江苏省徐州市专用车辆股份有限公司开发的电力专用高空作业综合水冲洗车。它由运载动力车作为装载车辆,并提供动力;在该运载动力车的车架上,安装有高电阻水的水箱及泵送装置;该运载动力车的车架上的机械臂上有托架,托架上方安装的工作平台能够实现人站在平台上工作和进行水冲洗工作。该冲洗车可进行高空无人的带电水冲洗作业,设备利用率高,安全性好,方便快捷。主要用于输电线路绝缘子的冲洗。

图2 电力专用高空作业综合水冲洗车Fig.2 Electric power special high-altitude operation integrated water washing truck
西南交通大学研制的绝缘子水冲洗机器人[1]如图3所示,包括冲洗机构、行走机构、通水管路、控制箱、蓄电池等部件。行走机构主要实现冲洗机器人的位置移动;冲洗机构主要实现水枪的瞄准;控制箱控制机器人各机构的运动;蓄电池为机器人各项设备提供动力;通水管路连通水冲洗车水箱和机器人水枪;下摄像机用于实时提取机器人周围环境信息;上摄像机和光电距离传感器安装在水枪支架上,上摄像机用于提取绝缘子图像信息,光电距离传感器用于测量绝缘子与水枪之间的距离;水冲洗机器人采用防淋雨设计,外壳用不锈钢薄板制成,机器人尾部地线与变电所的地线端相连,起安全保护作用。

图3 绝缘子水冲洗机器人Fig.3 Insulator water washing robot
国网山东省电力公司电力科学研究院与山东鲁能智能技术有限公司联合研制了一种履带式带电水冲洗机器人[2],如图4所示。该机器人采用履带式移动底盘,可在变电站室外道路和设备区内的草坪、石子路面等区域无障碍行走;采用多级组合绝缘[3],利用绝缘伸缩升降臂结构,提高水冲洗作业绝缘性能[4];采用无线远程遥控,能有效减轻人工作业强度,提高操作安全性,确保作业人身安全。机器人整机质量2000 kg,作业平台高度7 m,水枪出水压力 0~3 MPa。

图4 履带式带电水冲洗机器人Fig.4 Tracked charged water washing robot
2 腿臂复合型变电站带电水冲洗机器人
根据110 kV和220 kV变电站的结构布局和环境特点,遵循带电水冲洗作业的相关技术要求和操作规范,采用先进的智能化移动操作机器人技术,研究设计了一种新型履腿臂复合型变电站带电作业水冲洗机器人。整个系统包括移动操作机器人、远程控制基站和纯水供给车3个部分,其中,移动操作机器人和远程控制基站由中科院沈阳自动化研究所联合贵州凯里供电局共同研制,纯水供给车由徐州海哲伦专用车辆有限公司开发。
移动操作机器人采用履腿臂复合结构,包括移动底盘[5]、电控箱体及操作臂三部分,如图5所示。

图5 履腿臂复合型带电水冲洗机器人Fig.5 Track-leg-arm complex type electrified water washing robot
移动底盘采用履腿复合移动机构,可根据地面情况[6]采取行走、越障、转向等不同移动方式。相较于单一的轮式或履带式移动底盘,这种履腿复合式移动机构具有更强的地面适应性和越障能力。其运动学模型如图6所示。

图6 移动底盘的运动学模型Fig.6 Kinematics model of mobile baseplate

式中:R为主履带驱动轮半径;lR为移动载体两侧主履带之间的距离;vL、vR为移动载体两侧驱动轮转动速度;θL、θR为移动载体两侧履带驱动轮的角位移;(x,y,θ)为移动底盘的位姿。
操作臂[7]为五自由度,通过机械接口和电气接口架设在电控箱体上。操作臂基座具有升降移动自由度和偏航转动自由度,能够适应大空间作业要求;操作臂肘部有一个回转自由度,可实现操作臂的折叠展开动作;操作臂的腕部具有偏航自由度和俯仰自由度,这两个自由度可实现模拟人工水冲洗绝缘子的手腕动作;操作臂上集成有水冲洗作业专用喷枪头及管路接口。
远程控制基站[8-9]的组成结构如图7所示,包括嵌入式工控机、无线数传模块、图像接收模块、数字硬盘录像机、稳压电源模块及便携式电池箱。
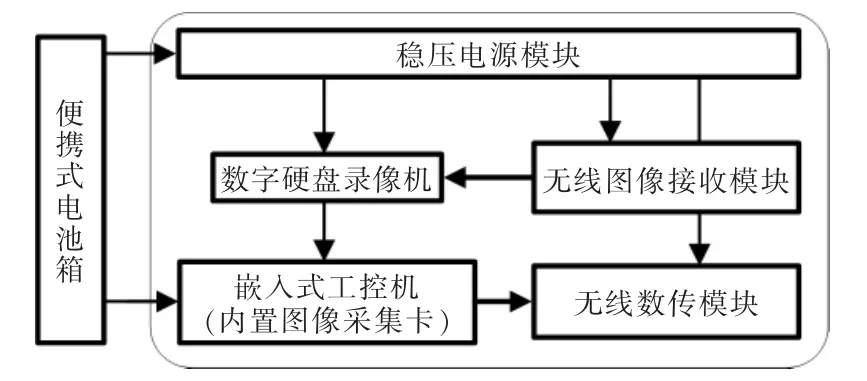
图7 远程控制基站Fig.7 Remote control base station
远程控制基站用于在复杂的非结构电场环境下,实现对机器人本体的远程控制。它与机器人之间采用无线通信方式,可对移动底盘进行运动控制,调整操作臂的位姿,以满足绝缘子水冲洗对喷枪的位姿要求。远程控制基站具有机器人任务规划和状态监控功能。
机器人在进入电场后,通过远程控制基站规划机器人的冲洗作业位置,输入运动指令,控制机器人前往待冲洗设备处;在机器人行进过程中,机器人自动完成目标位置估计、自身位置检测与调整;整个作业过程机器人的状态信息将通过无线传输的方式回传给远程控制基站。

图8 带电水冲洗机器人作业示意Fig.8 Operational indication of electrified water washing robot
机器人系统带电水冲洗的作业示意如图8所示。两台机器人一台作为主冲洗机器人,另一台作为辅助冲洗机器人,每台机器人的箱体端都配有连接法兰,能够实现与纯水供给车供水管线的快速连接。机器人启动并完成自检后,首先通过远程控制基站设定水冲洗作业位置;然后,两台机器人编队前进,通过传感器感知环境状态,自主运动到待冲洗设备位置;接着,利用机器视觉系统的反馈信息,调整操作臂[10]的位姿使其末端喷枪对准目标点;最后,连通给水管路,两台机器人同步完成对同一设备的水冲洗作业。
参照人工带电水冲洗作业的安全操作规范,机器人能够基于运动学建模和轨迹规划算法在线生成水冲洗作业的操作臂执行动作;此外,对于支柱绝缘子等作业目标,在非逆光和背景干扰较弱的条件下,机器人也能够基于机器视觉系统自主完成目标识别和定位。
3 结语
变电站带电水冲洗机器人[11-12]的研发和使用可以最大限度地弥补人工带电水冲洗作业的缺陷和不足,保障工作人员的人身安全,是智能变电站和无人值守变电站运维技术的发展方向。在未来,变电站带电水冲洗机器人的发展趋势可归纳为以下几点:①信息处理智能化:新一代变电站带电水冲洗机器人[13]将继续提高现有的信息处理智能化水平,实现全天候条件下作业目标的自主识别和定位,机器人的自主性和异常情况处理能力将进一步提升;②功能设定模块化:为满足多场景多任务的带电水冲洗作业需求,机器人系统需采用模块化设计,不断提高共用技术模块在机器人系统中的占比,可以适应更多的环境条件和变电站设备,同时大大降低机器人系统应用和维护成本;③现场作业标准化:需要借鉴现有的人工作业标准规范,研究建立一套适于变电站带电水冲洗机器人的现场安全操作标准规范,以及机器人产品的相关标准,推进此类机器人的广泛普及应用。
