自动台球机运球轨迹精确控制系统的设计*
2019-09-03王安敏刘言昭
王安敏 刘言昭
(青岛科技大学机电工程学院 青岛 266061)
1 引言
台球运动作为一项世界性的运动,深受世界各国人民的喜爱,普及非常广泛。一种美式16球的运球装置被设计出来,台球经过摆球装置整齐摆放在具有储球功能的三角形套筒的置球装置中,运球装置将置球装置,从台球桌的下方运送到台球桌桌面的指定位置,实现了台球的自动摆放,节省人力,降低了成本,提高了设备的利用率,步进电机具有良好的位置精度,运动重复性,可靠性高,优秀的启停和反转响应,控制简单等优点,在机电一体化产品中常做定位控制和定速控制[1]。本设计是基于东芝公司2008年生产的步进电机驱动芯片,以及可变电阻,接近开关,电磁开关,结合单片机STC89C52芯片提出的一种自动台球机运球系统的设计[2~6]。
2 摆球装置结构原理
为了完成台球的精确运送,本装置采用双电机运送,充分利用步进电机具有良好的位置精度和运动重复性,可靠性高,易于控制转速等优点。整体的运送通过下侧电机4来提供大的推动力,置球装置1的转动通过上侧电机2来控制。具体的结构如图1所示,装置中导轨安装在台球桌的正下方,通过TB6560AHQ控制下侧电机4正反转以及转速,来完成整体装置的运输,在到达指定位置后,接近开关检测到滑块,固定住大拖板5,电机继续前行,将一级臂推起到竖直位置下侧电机4停止,然后步进电机转动顺时针转90°后停止,其终止位置如图2所示,在置球装置将球放在桌面后,步进电机逆时针转90°,下侧电机4反转,带动整个装置回到初始位置如图1所示。

图2 运球装置终止位置
3 驱动控制系统设计
将台球按规则摆放到置球装置后,上位机将发送指令,经由STC89C52接受处理后,将由TB6560AHQ发送相应的指令,由测速模块测量转速以及由增量式PID算法计算出PWM的指令周期完成转速的调节,进而准确控制下侧电机前进时的转速。到达指定位置后,通过串口发送信息给下位机,由芯片TB6560AHQ驱动上侧电机,由可变电阻与AD5320芯片组成转角检测模块实时检测,上侧电机所转过的角度,采用增量式PID算法确定PWM的指令周期和个数。通过STC89C52判断各个指定位置的接近开关的高低电平来确定整体装置以及置球装置是否到达指定位置。
3.1 转角检测电路
测量步进电机所转过的角度,采用环形可变电阻与AD芯片AD5320组成的电路进行测量,将指针固定在步进电机轴上,电机转动带动指针转动时AB间的电阻发生变化,通过测量两点间的电压就可以测量电机转过的角度,采用线性插值算法计算出转角与阻值的关系。
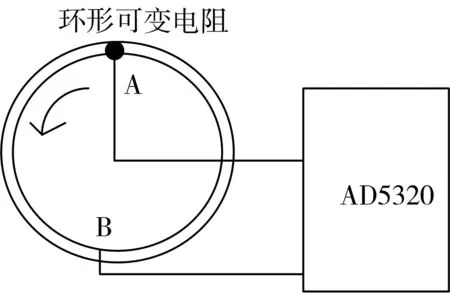
图3 转角检测电路
3.2 线性插值原理
线性差值原理的基本方法是将非线性测角度曲线按照一定的要求分成若干段,把相邻的分割点用直线连接起来,用此段直线代替相应的曲线,通过标定角度值和实际测量的角度值从而对从曲线进行迁移这样可以完成线性化处理和误差校正[7~12]。式(1)、(2)、(3)为插值公式:
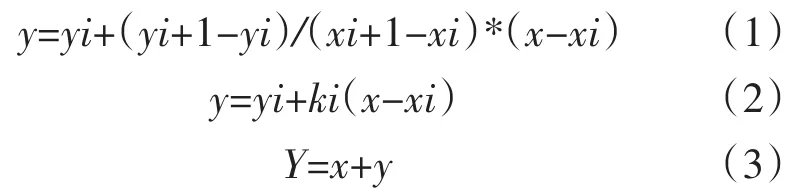
x为实际测得角度值,Y为校正以后的温度,xi为标定点的角度值,yi为校正点的角度补偿值,y为在温度测量范围内任一点的角度补偿值,ki为校正点曲线的斜率。

表1 角度测量数据
3.3 角度测量结果分析
在完成硬件电路设计后,角度测量模块测量转过角度,将模块测量的值与精密仪器测得的值进行比较,用于对测得值得数据进行进一步的修正。
1)首先将 0°~120°的转角,分割成 13 个测量点,间隔度数为10°。
2)每转过10°,使用精密仪器进行测量,同时记录测角模块的值,每个数据测量三次求平均值。
3)将两组测量值进行比较分析。其数据如表1,通对两组数据的对比可以知道,测角模块对角度的测量具有良好的稳定性,可满足一些工业结构对角度测量的精度需求。
3.4 下侧电机测速程序设计
在步进电机的控制系统中,采用反射式光电传感器对步进电机的转速进行测量,检测回路的输出端直接与单片机的I/O相连,将数据直接输送到单片机,通过使用单片机的定时器TI每3s检测一下步进电机的转速,测速流程图如图4所示。

图4 测速流程图
3.5 调速设计
下侧电机前进过程中需要调速防止速度过快对设备产生大的冲击力,在到达指定位置后,需要快速的返回到原点,在不同过程需要不同的速度,同时需要精确地到达指定位置,需采用增量式PID算法计算出PWM的指令周期完成转速的调节,将计算出的增量值,传送到STC89C52驱动调速芯片完成调速,具体控制方式如图5所示。
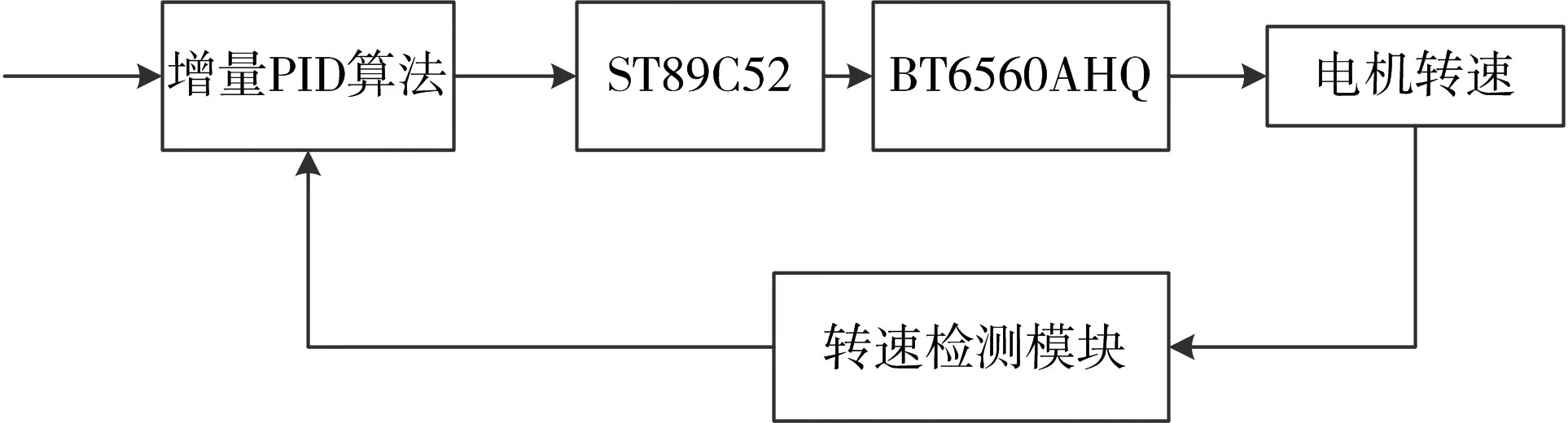
图5 调速控制图
3.6 增量式PID算法
数字PID控制是控制系统中非常常用的控制方法,PID控制原理框图如图6所示。
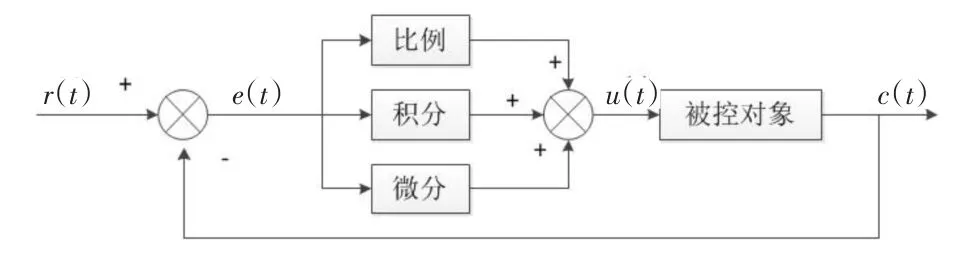
图6 PID控制原理框图
PID控制器是线性控制器,偏差e(t)由设定值r(t)与实际值c(t)构成:

将偏差的比例、积分和微分通过线性组合构成控制量,控制量输出为

由式(5)~(8)得PID控制规律传递函数为

(KP为比例系数;TI为积分时间系数;TD为微分时间系数。)
将模拟PID控制算法式(5)~(9)离散化,可得


由式(8)可知,当微处理器使用恒定的采样周期T时,只要使用前后3次测量值。
4 整体程序设计
系统运转流程如流程图7所示,系统的整体的运转分为四个阶段。
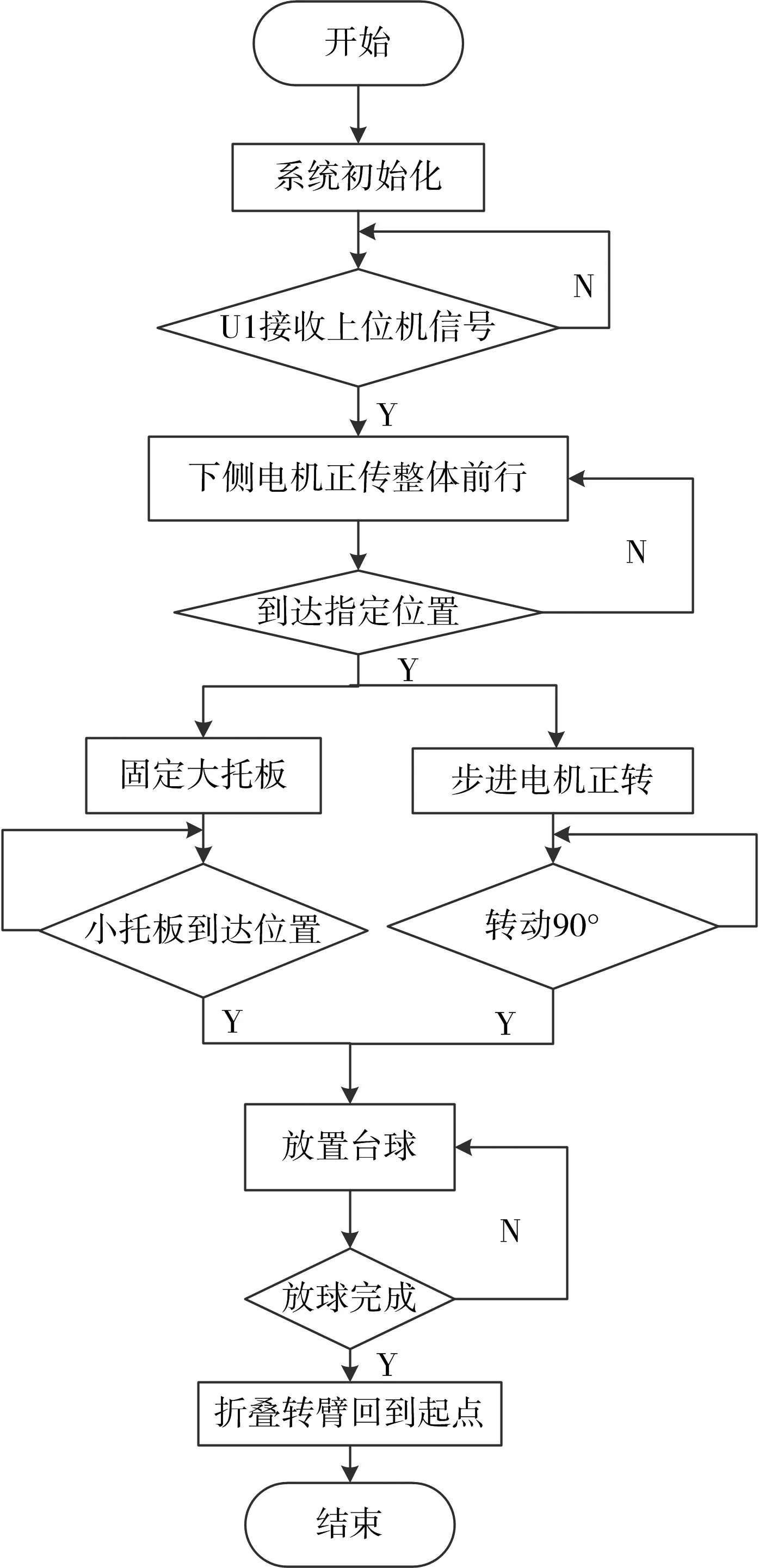
图7 系统运转流程如流程图
1)第一阶段装整体前移,步进电机快速运转,将整体运送到指定位置。
2)第二阶段电机降速,大小托板分离,接近开关实时检测小托板的位置。
3)第三阶段上侧电机转动,转角测量模块测量其转动角度,将球准确的放到桌面。
4)第四阶段上侧电机与下侧电机同时快速反转回到起始位置。
5 系统性能测试结果分析
完成整体的装置装配以及步进电机控制系统,首先系统进行初始化,上位机给系统发出指令后,由单片机固有定时器T0记录,运行每一阶段所用的时间,将其显示在液晶屏上。从图8所示运行轨迹分析图中可以看出,在对步进电机位置与转速的精确控制下,轨迹1明显比轨迹2的运行路程短,将缩短装置的运行时间从表2中可看出优化后每阶段的运行时间低于优化前,提高了设备的利用率,表明了增量式PID算法对步进电机的调速有一定的作用。
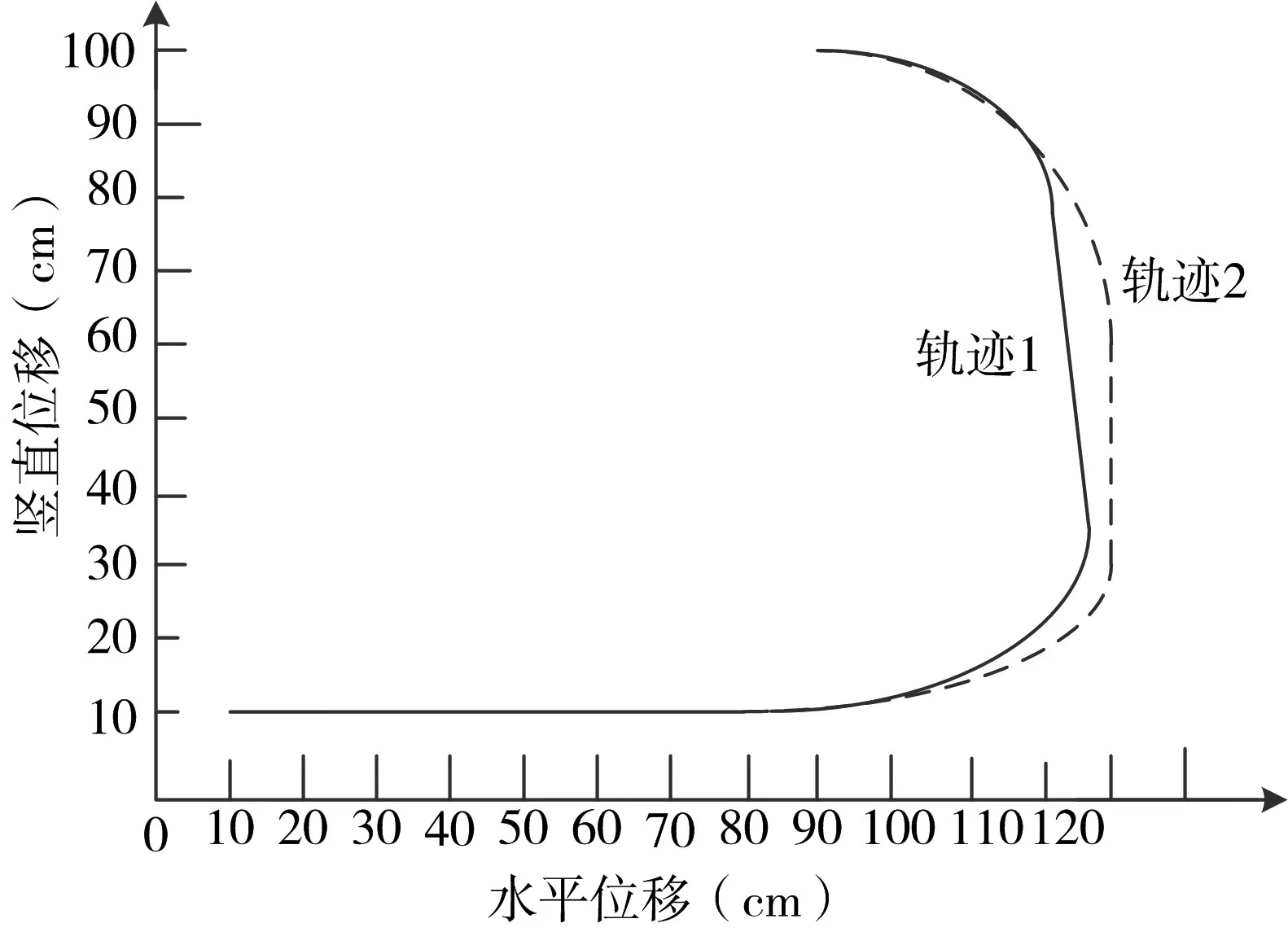
图8 装置运动轨迹分析图

表2 优化前后时间对比表
6 结语
通过对整体装置的运动特性进行分析设计出一种步进电机闭环控制系统,为了要满足对其精确控制的要求设计出基于线性插值原理的转角检测方法,通过运用单片机的定时器对步进电机的脉冲频率及宽度的调控,同时加入了增量式PID算法,对步进电机的输出特性进行了优化,达到了优化的目的,整个装置具有比较高的运行精度,具有使用价值,为以后相似装置研究提供了参考。
