北极高速水声通信实验初步研究
2019-09-02文洪涛杨燕明黄清华周小平周鸿涛
文洪涛,杨燕明,黄清华,周小平,周鸿涛
北极高速水声通信实验初步研究
文洪涛1,杨燕明1,黄清华2,周小平2,周鸿涛1
(1. 自然资源部第三海洋研究所,福建厦门 361005;2. 厦门声戎科技有限公司,福建厦门 361005)
因海冰覆盖和独特的声速剖面特征,北极水声信道有其特殊性,为研究、开发和利用北极,需要开展北极水声通信研究。2017年夏季在北冰洋中心区开展了一次距离1.26 km、通信速率为1.2 kbps的冰下水声通信实验。实验结果表明通信系统的载波频率偏高、声接收端背景噪声级较高以及水声信道上界面的海冰分布较为复杂是导致实验结果误码率偏高的主要原因,提出了相应的改进措施和建议。实验过程中,水声通信设备系统工作良好无故障。此次实验为极地水声通信装备的研制、极地水声通信的研究与应用积累了宝贵经验。
北极;水声通信;水声信道;海冰
0 引言
因全球变暖,海冰融化,北极地区在航运、渔业和石油天然气开发等方面所呈现出的巨大商业和战略价值使其成为国际社会焦点[1],加强北极的科学考察研究具有重要意义。其中极地声学研究可追溯到第二次世界大战后,1947年美国就成立“北极潜艇实验室”,并在1958年8月13日,其核潜艇鹦鹉螺号到达北极点[2]。因海冰覆盖,在北极直接利用卫星系统进行水下通信和导航十分困难,使得水声通信成为潜艇等水下航行器在冰下进行信息传输的主要方式[3]。近年来,国外十分重视北极的冰下水声通信,美国2011年在北极进行了潜艇通信的“深海传呼机”试验[2,4]。该试验利用冰基浮标、自主式水下航行器(Autonomous Underwater Vehicle, AUV)和水下滑翔机等在北极开展了冰下水声通信和导航的试验研究[5-7],其特点是采用低频载波实现远距离通信,通信距离可从几十公里到几百公里,但因带宽有限,通信速率仅为几比特到十几比特。
近年来,我国科学家也日益关注极地声学的研究[2-3,8-12]。在北极水声通信方面,相关学者开展了冰下水声信道的仿真研究[13-14]。为降低多途效应和实现低信噪比下的水声通信,采用参量阵技术[15-16]和直序扩频系统[16]进行研究,并在松花江进行了冰下实验验证。此外,还开展了多输入输出[17]和多用户检测[18]的冰下水声通信研究,并在渤海进行了冰下实验验证。
目前国内还未见到北极冰下水声通信实验研究成果的公开文献报道,本文针对中国第八次北极科学考察开展的一次北极冰下高速水声通信实验,对实验情况进行介绍,对实验结果进行研究分析,以期为我国以后的北极水声通信实验研究提供有益的参考和宝贵经验。
1 实验背景及系统介绍
北京时间2017年8月4日,在北冰洋中心区开展了一次冰下水声通信实验,实验站位位置如图1所示,图中为声信号发射位置,为声信号接收位置,二者相距约1 260 m,站位处水深约为2 047 m。图2给出了实验原理示意图。实验时,以浮冰观测站为平台,在浮冰上钻孔,将发射换能器布放至水深55 m处;以考察船为平台,将接收水听器同样布放至水深55 m处。实验过程中,调查船处于漂泊状态,但出于安全考虑,主辅机没有关闭,所以接收端背景噪声较高。实验期间的平均风速为10.13 m·s-1。实验海区的实测声速剖面如图3所示,为北冰洋典型的声速正梯度剖面,并形成“半声道”现象。根据现场观测结果,声发射冰站和考察船之间的声通信路径上海冰覆盖率不高,约为40%~50%,这是因为考察船位于无冰水道上。从考察船拍摄的冰站照片如图4所示,图中声发射冰站和考察船之间的海冰分布情况为:冰站浮冰-无冰水道-浮冰-无冰水道,这种冰、水交替的海面反而增加了水声信道上界面的复杂性,不利于声信号的传播。
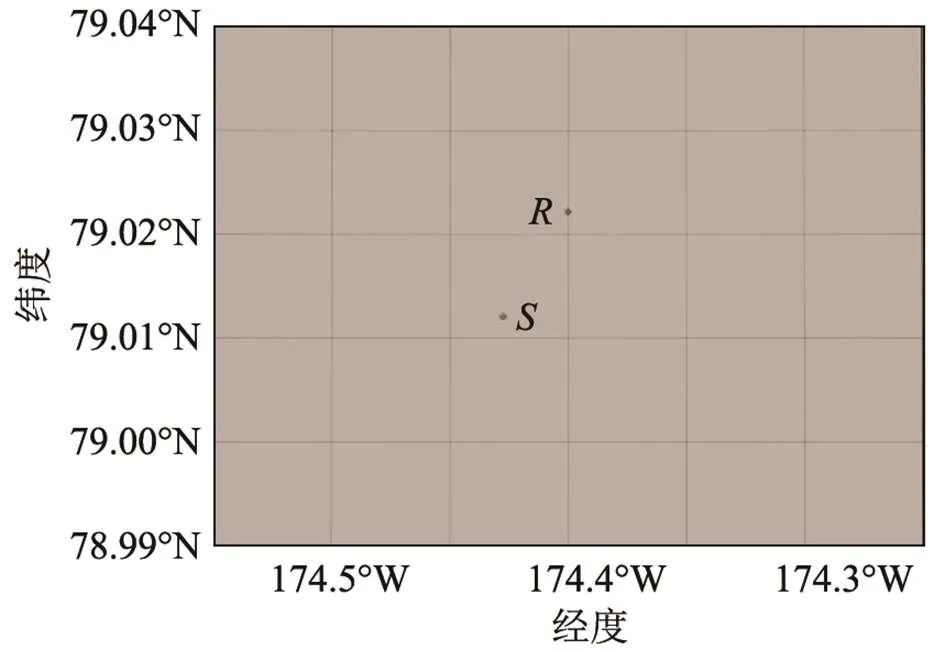
图1 冰下水声通信实验站位图

图2 冰下水声通信实验布设图

图3 声速剖面图

图4 从考察船眺望声信号发射冰站
实验所用设备为厦门声戎科技有限公司的水声通信机,发射端为UDD-630N发射单元,由发射显控系统、电池供电系统、功率放大器和发射换能器等部分组成;接收端为UAM-630接收单元,由接收水听器、电池供电系统和采集存储控制系统等组成。该设备采用的是多载波多频移键控(Multi-Carrier-Multiple Frequency Shift Keying, MC-MFSK)通信系统,该通信系统的基本框架结构如图5所示。图5中,信源由发射机的现场可编程阵列(Field Programmable Gate Array, FPGA)芯片完成前向纠错编码(Forward Error Correction, FEC),基带数据映射和快速傅里叶逆变换(Inverse Fast Fourier Transform, IFFT)。再插入由唤醒序列、地址码、信号和伪随机序列(Pseudo-Noise, PN)码同步头等一系列编码,经数字模拟转换器(Digital to Analog Converter, DAC)数模转换成模拟信号后,通过功率放大器驱动水声换能器在水中发射出去。声信号经过水声信道传播后由接收端的水听器接收,经放大滤波后由模数转换模拟数字转换器(Analog to Digital Converter, ADC)电路转换成数字信号,再送入FPGA芯片进行解码。解码时先对接收到的数字信号进行快速傅立叶变换,再经过基带数据解调,最后通过FEC译码,得到信源信息。通信系统的带宽为5 120 Hz;载波中心频率为30 kHz;声传输速率最大为1.2 kbps。采用正交频分复用(Orthogonal Frequency Division Multiplexing, OFDM)调制方式,共分成128个子载波,其中120个子载波用于传输信息,每个OFDM传输30 bit。声信号发射端的冰站实验现场照片如图6所示。

图5 MC-MFSK通信系统的基本框架结构
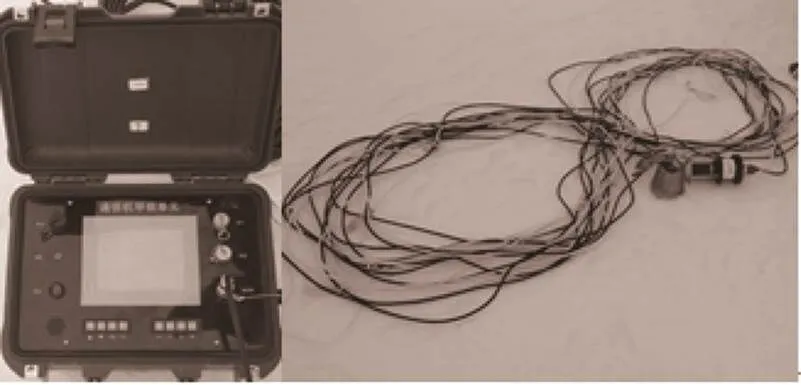
图6 声信号发射端的冰站实验现场照片
2 实验结果与讨论
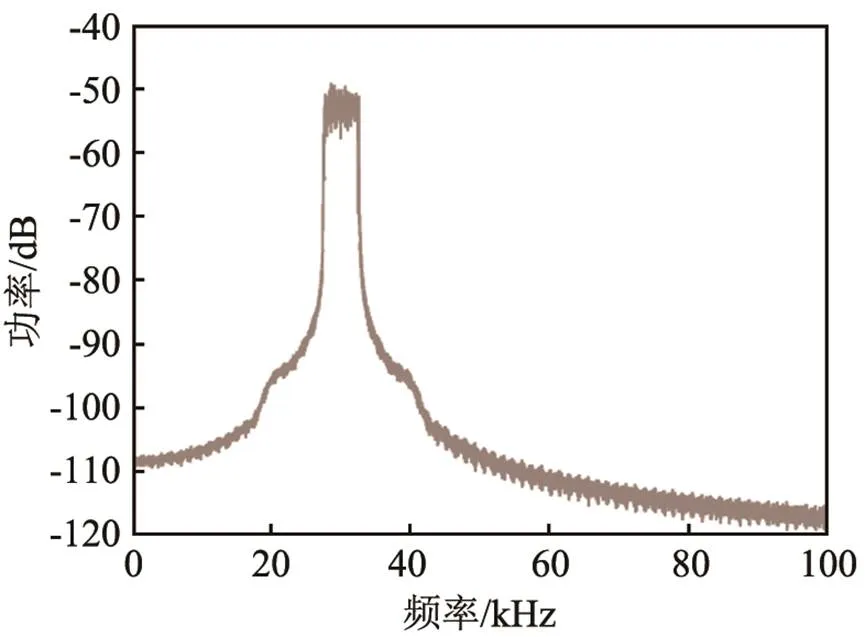
本次实验发送数据的帧信号结构如图7所示,由唤醒部分、获取部分和数据部分组成。图8、9分别给出了发射信号和接收信号的时域和频域结构,可以看出,接收端存在多个干扰脉冲,且背景噪声级显著升高。接收端采用相关接收机,接收信号与多个信号计算相关值,然后进行比较,找出具有最大相关峰值的信号,再把这个信号解映射到对应的比特值,图10为接收端同步信号的相关处理结果。
实验过程中声信号发射单元共依次发射了7个数据包,其中第2、3、5、6、7包有应答,第1和第4包无应答。第1包数据是由于DM365芯片中log文件的保存出现问题,没有显示出该数据包的信息,通过残留信息可以将第一包数据用现场可编程门阵列(FPGA)解码出来,并上报。第4包数据的同步信号Chirp可以检测到,但是导频码的误码率高,在FPGA的层面上就选择丢包。在接收端解码后数据包将与发送原始数据包进行每比特对比,并统计误码个数。误码率等于误码比特数/数据包比特数。有应答的接收数据的误码率统计如表1所示。
从表1统计结果来看,本次实验的误码率偏高,综合分析可能有以下几个原因:
(1) 实验的载波频率偏高。已知北极冰下声传播有较强的选频衰减特性,频率为15~30 Hz的声波传播最佳,在30 Hz以上,随着频率的升高,衰减急剧增加[2]。考虑到通信速率和通信带宽的需求,本水声通信实验系统的载波频率为30 kHz,在今后的实验中为了提高通信距离和降低误码率可适当降低载波频率。

图7 帧信号的结构

(a) 时域波形