地球同步轨道暗弱目标地基光学成像技术综述
2019-09-02罗秀娟陈明徕兰富洋
罗秀娟,刘 辉,张 羽,陈明徕,兰富洋
(1.中国科学院 西安光学精密机械研究所,西安 710119;2.中国科学院大学,北京 100049)
1 引 言
随着国际形势与空间资源竞争环境的日趋复杂,对空间目标探测和识别能力的需求不断增长,地球同步轨道(Geostationary Earth Orbit,GEO)暗弱目标高分辨率(20 cm)光学成像技术研究已引起很多国家的高度重视。大气对光的吸收、折射、散射、抖动以及目标亮度昏暗等问题,严重影响了空间目标地基光学的成像效果,成像分辨力与集光能力成为地基光学成像系统的重要指标。一方面,大气湍流限制了用于分辨目标细节的有效孔径尺寸,使传统地基望远镜实现衍射极限分辨率成像的临界口径与大气相干长度相等,分辨率被限制在1″左右。另一方面,增大集光孔径尺寸或入瞳尺寸可以提高集光能力去发现更多更远更暗弱的目标,但由于材料、制造工艺、机械结构和成本等原因,望远镜口径难以大幅增大。如果用自适应光学进行大气补偿,依然存在两个主要技术瓶颈:(1)GEO目标的目视星等通常为Mv=12,甚至更加微弱。自适应光学系统波前传感器的效能在目视星等Mv≥7时明显下降,使信噪比降低,严重影响自适应光学校正能力;(2)要达到衍射极限分辨率,大型望远镜的自适应光学系统变得极其复杂、昂贵和难以实现。目前,世界上最大自适应镜面是装配在欧洲南方天文台VLT(Very Large Telescope)望远镜上的自适应副镜,口径为1.2 m。因此,如何突破大气湍流对成像分辨率的限制并提高系统的集光能力,成为科学家不懈努力的目标,目前已发展出多种传统与非传统光学成像技术。
2 传统成像技术
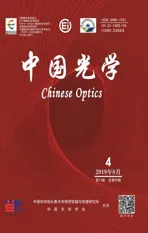
传统光学成像中的光学系统主要是靠折射和反射元件在焦平面形成二维图像。空间目标传统光学成像技术分为大孔径成像、稀疏孔径成像、散斑成像和高光谱成像等,如图1所示。
图1 空间目标地基传统光学成像技术 Fig.1 Traditional ground-based optical imaging technology for space target
一些代表性的天文台将可见光波段的大气相干长度定义在10~20 cm内。在大气相干长度为10 cm的观测站址,1 m口径望远镜因大气湍流的影响,其分辨率并不比天文爱好者手中10 cm口径望远镜高。受大气湍流、目标亮度和探测能力的限制,传统4 m自适应望远镜只能对7等星左右的低轨目标进行高分辨力成像[1]。GEO轨道目标主要是空间碎片,NASA估计GEO目标尺寸在10 cm及以上的大约有3 250颗,受最小碎片尺度灵敏度的限制,空间碎片编目中能被维持的一般是70 cm的GEO目标。轨道目标光学特性是具有很多变量的复杂函数,包括目标大小、形状、方向、观测站、太阳和目标的几何位置以及材料的双向发射分布函数。由于GEO目标距离遥远,可以用球体近似,目标视星等表示为:

(1)
其中,Msun为太阳视星等(-26.7 Mv),D是目标直径,R是观测站到目标的距离,αS是全反射率,αD是漫反射率,f(φ)是太阳相位角函数,一般地,全反射相位角函数是常数1/4,漫反射相位角函数为:

(2)
其中,φ为太阳相位角。目标反射流量密度如下:
ECSO=5.6×1010×10-0.4Mobj.
(3)
由以上公式可知,GEO轨道70 cm目标在大气层外的亮度为16 Mv[2-3]。可见GEO目标暗弱,使望远镜光瞳面接收到的信号十分微弱,信噪比很低;而且在毫秒级的大气相干时间内,昏暗的目标无法提供足够数量的光子来探测大气相位畸变,从而无法利用自适应光学校正畸变的相位,直接影响了对目标的成像。
2.1 大孔径成像
2.1.1 单镜面成像
单镜面成像特性会受到集光孔径尺寸的限制。集光孔径尺寸确定了光收集性能(比例为D2)和分辨率(比例为1/D)。为了收集尽可能多的光以增加信噪比,人们力争建造更大口径的望远镜。当然,造价也会按D2.7左右的比例增大[4]。风力、本身重力以及周围温度变化的作用会使巨大的镜面发生变形,直接对成像产生威胁。由于材料、工艺和机械结构等的限制,进一步增大单口径望远镜的直径极为困难。而且,大型单片玻璃镜热胀冷缩变化较为缓慢,需要一段时间才能适应周围环境,这就削弱了望远镜的聚焦性能。同时,笨重的大镜子还需要复杂的机械支撑系统。随着望远镜尺寸的增大,大气湍流就更加难以校正,系统造价也将无法承受。目前全世界拥有13个等效孔径为8.0 m或更大些的望远镜设施,如美国、英国、加拿大等6国合作建成的8 m GEMINI双子望远镜,日本的8.2 m SUBARU昴星团望远镜,欧洲南方天文台的8.2 m VLT甚大望远镜。最大的是位于美国亚利桑那州Graham山上的大型LBT(Large Binocular Telescope)双目望远镜。它有一对8.417 m的望远镜[5],该尺寸已经达到了当今单片望远镜镜面制造技术的极限,仍然无法满足对GEO空间目标观测的要求。
2.1.2 拼接镜成像
镜面拼接技术是用多片子镜片紧密拼接合成大口径镜面。随着快速控制系统、主动光学和自适应光学的出现,由小镜片拼接构成大望远镜的构想已经实现。通过光学镜面拼接技术,我国已成功研制出4 m拼接式LAMOST(Large Sky Area Multi-Object Fiber Spectroscopy Telescope)大天区面积多目标光纤光谱巡天望远镜。国外已实现大于8.4 m的等效孔径,如,在夏威夷大岛上莫纳克亚山的凯克天文台有一对有效孔径均为10 m的Keck望远镜,每个镜面都是由36块1.8 m宽的六边形小镜片紧密拼接而成[6],如图2所示。
图2 凯克拼接镜 Fig.2 Keck Segmented mirror
多镜片拼接结构除了可以解决主镜重量问题外,还允许采用自适应光学技术来校正大气湍流的影响。如果要收集来自GEO昏暗目标的光信号且要保证较好的分辨率,镜子的孔径还需要继续做得更大,由于技术和造价原因,进展缓慢。国际上正在研究和筹建中的巨型地基天文光学望远镜主要有加拿大的20 m望远镜VOLT、美国天文光学中心的30 m望远镜TMT[7-9]、加州理工大学的30 m望远镜CELT、欧洲南方天文台的39 m望远镜E-ELT[10]。虽然这些大口径望远镜能识别更多、更暗、更远的天文物体,但就其分辨率而言,根本无法满足GEO目标高分辨率识别需求,只能分辨出一些尺寸较大的GEO目标的整体轮廓。
2.1.3 稀疏孔径成像
稀疏孔径是指由多个小孔径子镜按照一定形式排列等效成大口径主镜。
(1)多镜面成像
1978年,美国建造了第一台多镜面望远镜(Multiple Mirror Telescope,MMT)。该MMT由6个口径各为1.8 m的卡塞格林望远镜组成。MMT的6个望远镜绕中心轴排成六角形,它们的光束被聚集到同一个焦点上,等效孔径为4.45 m。后来被改造成孔径为6.5 m的望远镜。美国Streward和Arizona大学联合研制的20 m口径巨型麦哲伦望远镜(Giant Magellan Telescope,GMT),主观测镜片将由7个直径均为8.4 m的大型子镜片组成(图3)。第一面主镜于2005年铸成,于2010年初完成抛光,整个望远镜预计在2025年完成。造价预计超过10亿美元。
图3 GMT望远镜概念图 Fig.3 GMT telescope concept map
(2)稀疏阵列成像
如果要分辨出36 000 km远处GEO目标上的细节,望远镜的口径需达到130多米,这就必须引入光学干涉测量技术。稀疏阵列成像技术是一种利用小望远镜阵列实现较大等效孔径的振幅相干成像技术,每个望远镜孔径采集到的干涉信号代表傅立叶平面上一个分量,采集这些傅立叶分量可以重建目标图像。优点是阵列不需要具有每个可能的傅立叶分量所对应的孔径,可利用稀疏阵列来成像;同时,使用小孔径望远镜阵列能降低成本。缺点是探测器的路径要精确匹配,才能在“孔径对”间形成干涉条纹,且这一过程所需的复杂光学系统会造成较大光能损失,在10 ms大气相干时间内产生的干涉条纹太弱而难以探测,共相位要求是制约其应用的主要问题。此外,除了美、英两国合作研制的MROI光学/近红外成像干涉阵列(图4)是独立建模外[11-12],其它的都依赖于所成像目标的先验模型[13-15]。

图4 MROI干涉阵列 Fig.4 MROI interference array
对GEO目标成像的已有项目主要有NPOI干涉仪、MROI干涉仪和DARPA Galileo机动稀疏孔径望远镜,造价都超过了10亿美元。目前还未能实现对GEO目标的高分辨率成像观测。
2003年,美、英两国开始合作研制MROI,对由10个1.4 m可移动式望远镜组成的干涉阵列进行严格“设备级优化”,力图经过科研人员的不懈努力,使MROI的灵敏性比现有地基干涉仪阵列提高50~100倍,分辨率比地基经自适应光学校正的望远镜提高10倍以上,角分辨率最大达到0.35毫角秒(mas),使之具有对同步轨道目标成像的潜能。2006年,其2.4 m直径的快速定位与跟踪主镜完成了首光实验,2008年,进行了阵列及1.4 m主镜单元设计,2011年,完成对GEO目标成像的数值仿真,2015年,与NASA合作利用跟踪镜实现了对WT1190F天体历时两天的定位与跟踪,2018年6月,阵列各个单元已经进入最后的装调阶段。MROI有望在未来的10到20年得到全面部署。
2012年,美国国防先进研究计划局DARPA启动了一项对GEO目标成像的Galileo机动稀疏孔径成像项目[16](图5),用灵活的光纤光缆取代传统天文长基线干涉仪中的固定抽空光管,在一个1.5 m级固定式望远镜的基础上,再引入一个或几个可移动式1.5 m级望远镜来测量GEO目标反射光的相位差,方便地进行基线配置(最长基线500 m),以期利用分时采集的多组数据实现对GEO目标成像。
图5 Galileo望远镜概念图 Fig.5 Galileo telescope concept map
图像空间分辨率为10 cm(角分辨率为2.5 nrad),对亮度为Mv=11等星目标的图像质量达到国家影像判读等级NIIRS 8或更好,最大采集时间为20 h/10晚。原计划于2016年在星火光学靶场进行Galileo项目的全面演示,目前尚未有最新研究进展的相关报道。
2015年3月5日和6日,美国海军利用目标帆板与太阳的视赤纬相同时反射阳光产生的几分钟高亮闪烁(甚至达到一级目视星等),用NPOI干涉仪实现了对DirecTV-7S同步轨道卫星的观测[17],分辨率为4 m。这种观测条件极为苛刻,局限于仅有两次的“闪烁季节”,即每年春分前夕和秋分后的一周时间,且太阳能帆板可以较强反射太阳光的时间仅仅持续几分钟。下一步,NPOI拟设计更新系统,使3台1 m望远镜同时试运行,以提高仪器的灵敏度,使其在“非闪烁”季节也能对GEO目标进行观测,目前还处在设计的初级阶段。
2017年5月,美国情报高级研究计划局IARPA提出一个对地球同步轨道目标成像的Amon-Hen项目[18]。与现有的设计相比,在其性能不受到明显影响的前提下,试图将系统成本降低至少一个数量级。期望对GEO目标进行分辨率为12.5 nrad的成像。其单个目标数据采集时间少于1 h,1天内即可完成图像处理,图像质量需达到NIIRS 6级或更高。初步拟定2018年3月启动Amon-Hen项目。期望33个月后达到能够演示的水平,图像分辨率为75 nrad。未来将根据前期的成功仿真、建模和实验结果,来决定进一步的经费支持力度,以实现全面完整的GEO成像验证。
稀疏阵列成像技术虽然在对恒星成像上是非常成功的,但现有干涉阵列因望远镜数量有限、采样数据过于稀疏、最短基线太长等因素的影响,灵敏度和分辨率受到限制,都无法满足对GEO目标成像的要求。实现对GEO目标成像的技术难点在于如何提高灵敏性和分辨率,并尽可能降低整个系统的造价。由于GEO目标非常昏暗,干涉条纹太弱而难以探测,因此其成像的最佳时机依赖于太阳和目标的相对位置,每年的观测时间仅有十几天,非常有限。尽管困难重重,从美、英两国的仿真结果看,稀疏阵列成像技术具有对GEO目标成像的潜在可能。
2.1.4 散斑成像
从地面拍摄空间目标时,时间变化尺度为10 ms的大气湍流在拍摄时间内会产生多次变化,从而使图像产生模糊。图像中出现散斑的原因是,来自直径约为大气相干长度r0、分布于望远镜整个孔径的许多相干小区域内的光产生了干涉[19]。Labeyrie研究指出,短曝光的图像强度分布是望远镜和大气的传递函数与目标物函数的卷积[20],可通过物函数的自相关恢复傅立叶模量信息,因此可利用每个受到最小化大气影响的短曝光时间平均值恢复出傅立叶幅值,再结合先验知识,获取目标的图像。由此引伸出诺克斯-汤普森法[21]和三重相关法[22]两种图像重构方法。诺克斯-汤普森法和三重相关法在一定情况下可进行相位恢复,由此恢复出完整的图像,这对GEO目标成像非常有用。
近几年,借助于灵敏度高、光度测量线性度好、速度与其它探测器相当的电子倍增CCD相机的大力发展和应用,使散斑成像技术在单孔径高分辨率成像中解决了一些重要问题,继而增加了散斑成像在中型和大型望远镜中的应用。2016年1月,美国用8 m双子北望远镜成功地对亮度比16等星还昏暗的太阳系外恒星目标成像,分辨率达到衍射极限。因此,有望在未来将散斑成像技术应用于对GEO昏暗目标成像[23]。
2.1.5 高光谱成像
高光谱成像技术融合了传统成像技术和光谱技术的优势,可以同时获取被测物体的空间信息和光谱信息。高光谱传感器将物体反射的电磁波分离成很多独立的窄波段,形成该物体独一无二指纹印般的特征。随着高光谱成像的光谱分辨率的提高,其探测能力也随之增强。目前应用的高光谱成像主要用于对地球表面成像,能准确区分地表植被覆盖类型、道路地面的材料等。空间目标的光谱测量的主要对象是太阳反射或者自身辐射的光谱。由于空间目标温度低,辐射强度也很低,因此限制了光谱成像的探测能力。科研人员期望将高光谱信息和其它成像信息结合起来,扩充人们对特定GEO目标的知悉度。因此,利用高光谱成像来观测GEO目标、获取其高光谱信息的研究,一直在进行中。
3 非传统成像技术
非传统成像技术本质上是一种采用激光照明、不需要成像透镜的“无透镜”计算成像技术。研究表明,依靠相干激光照明的主动成像技术具有对GEO暗弱目标高分辨率成像的潜能。空间目标非传统主动成像技术主要有强度相关成像、剪切光束成像和傅立叶望远术3种。非传统成像技术利用小孔径发射激光照明目标,并采用分布式、低光学质量的光桶式接收系统在光瞳面接收反射光,通过测量目标空间频谱实现对目标成像,同时这3种技术借助于合成孔径测量和偏振敏感性的技术优势,在技术机理上可透过湍流大气对空间目标进行高分辨率成像,无需采用自适应光学方法进行大气补偿。3种技术都引入了长基线光学干涉测量法,成像分辨率取决于发射或接收阵列所构成的等效口径。
3.1 强度相关成像技术
强度相关成像技术是基于不同探测器光子到达时间的相关性发展起来的。发射单束激光照射目标,利用多个高频探测器构成的强度相干阵列采集目标光强起伏信息,通过计算目标光强相关度获得目标空间频谱模值,再结合目标先验信息并利用迭代相位恢复技术,对空间频谱相位进行估计,得到目标的傅立叶相位,进而重构出目标图像。成像的空间分辨率取决于探测器接收阵列中最长基线长度,空间频率灵敏度与被观测目标的功率谱成正比。主要应用于恒星成像领域,利用大型集光面的强度干涉阵列可获得高亮度恒星细节图像,成像分辨力达到亚毫角秒量级[24-27],但在目标亮度较暗时信噪比非常低,导致图像质量严重下降甚至无法成像。该技术因相位信息缺失、灵敏度差,信噪比低,只适合对一些先验信息已知的目标进行成像。在对目标成像的研究中,需采用激光对目标进行主动照明来提高目标的亮度,本质上是一种激光散斑相关成像技术,是首个被考虑用于深空目标监视的主动成像方法之一[28-30]。
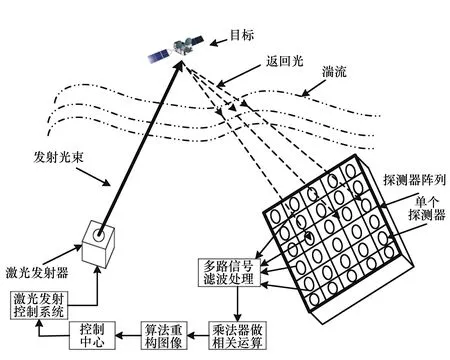
图6 强度相关成像技术原理示意图 Fig.6 Schematic diagram of imaging correlography
早在1987年,Paul S.Idell就已详细阐述了激光散斑相关成像理论,用仿真结果给出使用稀疏强度探测器阵列的可行性[31]。1991年,David G.Voelz和Paul S.Idell等人进一步对激光散斑相关成像技术进行了理论研究、计算机仿真和实验验证,给出了信噪比表达式,为精确重建简单目标的频率分量提供了方法[32]。1997年,美国空军对一些已有先验知识、选定类别的低地球轨道目标进行成像实验,利用强度相干阵列得到了低轨目标的部分图像[33-34],对500 km低轨目标的分辨率为25 cm。但图像质量不稳定,大气引起的相位变化使每帧图像质量均不相同。
2000年之后,因强度相关成像的信噪比非常低,国外用其对目标成像的研究基本处于停滞状态。受视场的限制,接收阵列尺寸受限,信噪比难以提高;而且,因每个阵元接收到的能量独立参与信号重构,不具有能量叠加特性,对激光能量需求较大,实现困难。自2014年以来,北京跟踪与测量通信技术研究所高昕团队开展了对强度相关成像技术的研究,分析了相干阵列的集光面以及阵列排布方式对成像质量的影响[35],优化了强度相关成像的频谱模值估计方法和相位恢复算法[36],提高了成像质量。若进一步研究将该技术用于对GEO目标的成像,首先须解决空间频谱模值探测信噪比低和频谱相位恢复困难两大瓶颈技术[37]。但S.R.Restaino认为,利用现代的信号分析技术,并结合不同辨别处理噪声的方法,有望将强度干涉仪的信噪比提高至少3倍,甚至可能6~7倍[38],未来可使强度相关成像技术用于对GEO目标成像。
3.2 剪切光束成像技术
剪切光束成像是一种利用目标返回光束散斑场来成像的技术。同时发射3束以L形式排列、彼此间有微小频差的相干激光照明目标,3束光之间相距一个小剪切距离。通过选择频移量使三光束间形成拍频,通过移动每对光产生的干涉条纹扫描目标表面,用高速探测器接收目标散射回波信号,通过拍频信息测得散斑场幅值,同时利用获得的两散斑图样间的相位差来恢复散斑相位,进而重构出目标图像。
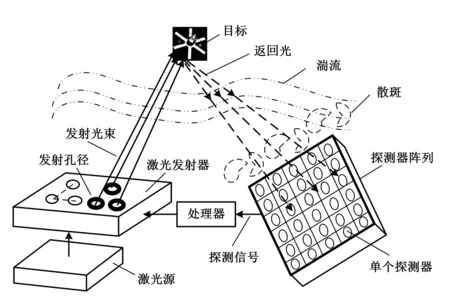
图7 剪切光束成像原理示意图 Fig.7 Schematic diagram of sheared-beam imaging
该技术不受湍流扰动和快速运动目标多普勒频移的影响,无需自适应光学和成像透镜就能实时获得远程目标接近衍射极限的图像,分辨率取决于接收阵列的尺寸。剪切光束成像最根本的优势在于它是一种振幅干涉测量法,场相位和幅值测量的灵敏度与目标的傅立叶模量(而不是功率谱)成正比,具有平方根因子优势。因此,与强度相关成像技术相比,剪切光束成像的信噪比较高,但实际系统的实现要比前者困难。
1987年,美国空军研究实验室(AFRL)的AIT项目[39-40]在主动成像试验中,使用了一种被称为DCbeam的剪切光束,由单光束照射物体,观察从目标返回光的去偏振特性。该过程简化了发射器,在地面对若干LEO目标进行成像,并取得了1 000 km距离分辨率达到30 cm的成果。该实验为后来剪切光束成像技术的发展奠定了基础。1990年,光学科学公司(the Optical Sciences Company)提出剪切散斑成像概念,讨论了透过大气湍流产生高分辨率目标图像的可能性。1993年,Richard A.Hutchin阐述了二维剪切光束成像技术消除大气畸变的机理,给出了一些研究结论[41]。同年,AFRL公布了室内实验结果,证明了剪切光束成像技术对光学相位畸变具有补偿能力。在随后的几年里,人们开展了大气湍流效应补偿和波前重构算法方面的研究工作。尽管光瞳面相位差测量方法有效补偿了低海拔高度(低于9 km)大气湍流对成像的影响,但对于角尺寸大于大气等晕斑的目标,下行链路高海拔大气湍流引起的大气非等晕效应会对低轨道目标成像质量产生影响[42-43],需要利用恢复出的数据寻求一种简单补偿方法。2003年,James R.Fienup等人研究了利用多接收器阵列测量相位差的方法,又于2010年阐述了剪切光束成像的技术机理与约束条件[44]。
美国在2011年的财政报告中将剪切光束三维成像列入了研究计划。针对空间态势感知应用,美国光学物理公司(OPC)提出剪切光束成像技术研究建议:采用轻量级菲涅尔薄膜收集器研制一个0.5~10 m孔径天基成像器,其对30~1 000 km远处目标可实现5 cm二维图像分辨率和5 mm深度分辨率;由平铺板条建成一个Φ20 m口径地基成像器,对1 000 km远处目标达到二维2.5 cm和深度2.5 mm的分辨率。同年,OPC着手研究三维剪切光束成像技术,意在研发不受大气湍流和多普勒频移影响的轻量级成像系统,可用于地基、空基或天基平台。Richard A.Hutchin等人制定了成像系统实现方案。OPC将研究分为两个阶段。第一阶段演示验证了正投影子孔径阵列散斑图像处理方法的可行性,并于2015年完成了1 km水平路径外场实验;通过分析、仿真和实验,证明了剪切光束成像技术不仅完全不受边界层湍流的影响,而且还减弱了大气湍流的影响[45]。OPC在 2016年开展了第二阶段的“原型设计”工作。空基成像器对100 km远处目标的预期分辨率可达到7.5 cm,比边界层湍流极限好7倍,在此基础上的三维成像研究也在同步开展。
在国内,中国科学院西安光学精密机械研究所于2013年开始对剪切光束成像技术进行研究[46-48],构建了研究平台,在实验室模拟的湍流环境下验证了剪切光束成像原理和图像重构算法的可行性,并于2017年建立了剪切光束三维成像系统模型,对大气湍流效应补偿、高质量波前重构等关键技术进行了攻关。
利用剪切光束成像技术对GEO目标的成像工作,尚处于探索研究阶段。在GEO弱光条件下,散粒噪声会影响相位差的测量性能,限制了干涉条纹相位的估算精度。此外,还须解决上行链路大气引起的剪切误差对成像的影响。由于接收阵列的每一个阵元的能量不能叠加,高轨道目标成像时对激光能量需求较大,实现难度大。研究表明,剪切光束成像技术对中轨道目标成像的能量需求大幅降低,因此,在对中轨目标成像领域具有较好的应用前景。
3.3 傅立叶望远术
傅立叶望远术[49-51]采用逆向长基线干涉测量法,用稀疏小孔径望远镜发射阵列进行基线扩展,形成超大等效孔径成像系统,成像分辨率取决于发射阵列中最长基线长度。从3个孔径同时射出具有微小频差的3束同源调制激光,在目标上形成移动的干涉条纹,由探测器接收其反射信号,该信号与uv面上的一个分量相对应。然后从不同组合的3个发射孔径中再次发射3束光照明目标,反射信号被接收并与uv平面上另一分量相对应,如此利用足够多的基线配置采样得到整个uv面,并利用相位闭合技术抑制大气湍流对成像的影响,最后通过傅立叶变换重构出目标图像。由于测量的只是随时间变化的强度函数,所以可使用简单的大型低光学性能接收器阵列。相对地面观测者而言,GEO目标长时间无明显姿态变化,因此可以在同一基线进行多次测量来累积信号和减小噪声,并提供时间让系统配置到其它基线来测量足够多的目标信息,用以重建目标图像,因此傅立叶望远术特别适合对GEO目标成像。所需激光能量小,信噪比高,可对14、15等星GEO目标高分辨率成像。

图10 GLINT发射架与探测器接收阵列 Fig.10 GLINT transmitter and detectors receiving array
1997年,美国AFRL启动了同步轨道目标光学成像国家试验项目GLINT(图10),对傅立叶望远术进行研究,在随后几年对发射系统和接收系统进行了大量的理论研究与仿真分析,并先后开展过一系列实验室及外场实验验证工作[52-58]。
2004年,由于GLINT在实施过程中遇到了重大技术难题,美国将其研究重心转移到了主动成像国家试验项目SAINT上,针对低轨道目标进行傅立叶望远术成像系统的研究工作,对1 000 km低轨目标成像分辨率预期达到5 cm或更高。计划在SAINT研制成功后,再用15年时间完成GLINT项目,对地球同步轨道目标实现1 m或更高分辨率的成像[59]。围绕SAINT项目,美国2008年建立了一套可同时发射5束激光的实验室装置,在实验中验证了多光束傅立叶望远术系统对快速变化目标的成像能力[60],得到了斯特列尔比大于0.9的较好重建图像。目前尚无SAINT研制成功的相关报道。俄罗斯紧随美国之后,于1999年开始进行傅立叶望远术深空成像技术研究,进行了大量的理论研究工作[61-63],特别是在有关大气湍流与目标表面散射带来的噪声方面的理论工作。2012年后,国外针对傅立叶望远术系统层面的研究报道已不多见,转而对其中的一些关键技术进行了针对性的研究,例如2012年法国对光学相干成像中的闪烁效应进行了研究;同年美国佛罗里达大西洋大学William T.Rhodes研究了在时间平均的情况下傅立叶望远术透过水平路径高分辨率成像的问题[64-65]。2015年,William T.Rhodes等人研究并数值仿真了光束在1 km水平路径湍流中传播后的分辨率问题,指出用傅立叶望远术可达到衍射极限或更高分辨率[66];2016年,他们又定义了傅立叶望远术的空间频率域点扩散函数,用来评价成像系统的性能。
近几年,国内的研究机构如中国科学院西安光学精密机械研究所(简称西安光机所)、长春光学精密机械与物理研究所(简称长春光机所)、中国科学院光电研究院,国防科技大学、电子科技大学等也开展了对傅立叶望远术成像技术的研究及验证工作[67-71]。2016年,长春光机所为确定上行链路大气湍流对傅立叶成像技术的影响,开展了300 m水平路径成像实验[72]。西安光机所自2009年至今,进行了大量的理论研究、计算机仿真、实验验证及演示系统研制工作[73-81],其图像重构算法可消除大气引起的相位起伏、频率漂移及光强闪烁等因素对成像的影响[82-84];同时,对激光大气传输及大气湍流效应进行了研究[85-87]。2013年,西安光机所首次建成5光束室外演示系统。2016年,又建成等效口径为1.5 m的多光束外场验证系统,基于试验场地的大气参数,用1.2 km激光水平传输路径中的大气效应来等效整个大气层的主要湍流效应,验证了相关关键技术以及傅立叶望远术对上行链路大气湍流的抑制作用和成像能力,成像分辨率接近衍射极限[88]。
傅立叶望远术具有成像时间长、能量需求小和信噪比高等特点,适合于对同步轨道目标成像。若要对快速穿越天空的其它目标成像,则需要利用一次可发射多组三束光的“多光束傅立叶望远镜”,但需解决高频干涉信号弱等问题。
4 结束语
对GEO暗弱目标成像的两个重大挑战是分辨率和灵敏度。传统大孔径望远镜受限于目标尺寸、亮度、望远镜口径以及系统的大气补偿能力,成像分辨率非常低,无法实现对GEO目标的高分辨率成像观测。而利用高光谱成像观测目标的技术也处于研究阶段。随着电子倍增CCD相机的进一步发展以及相位恢复新方法的创建,散斑成像技术有望在未来应用于对远距离昏暗目标成像。用单个小孔径望远镜进行基线扩展的稀疏阵列成像是一种较有前景的方法,现在对GEO目标进行被动成像的项目有NPOI干涉仪、MROI干涉仪和分辨率极低的大型光学望远镜(如:Keck和MMT)。这些系统的造价都超过了10亿美元,各自存在一些技术难题和局限性,目前尚不能对GEO目标进行高分辨率成像。科研人员提出的许多GEO地基被动成像方案都集中在几十个昂贵的、需要自适应光学技术的大孔径(1.5~2.0 m)合成系统上。这些具有足够孔径数量的系统虽能为后续的图像重构提供充分覆盖uv面的分量,但也导致整个系统的造价高得令人望而却步。新一代MROI增强型干涉阵列以及Galileo机动稀疏孔径望远镜具有对GEO目标高分辨率成像的潜能[24,89],但因为目标非常昏暗,信噪比仍是个限制性问题。
采用激光照明的非传统光学成像方法(包括强度相关成像、剪切光束成像、傅立叶望远术等方法),在技术机理上可透过大气湍流对空间目标进行高分辨率成像,但还存在一些需要深入研究的技术问题,一时难以实现。一方面需要较长相干长度的高功率激光,至少为目标深度的两倍[48];另一方面,若使用脉冲激光照明对空间运动目标成像,要保证来自不同孔径激光束间的完全恰当干涉不是一件易事。
总之,空间目标地基光学探测与识别技术与需求之间差距很大,目前尚未能实现从地面对GEO目标的高分辨力成像,有待对传统天文或非传统成像技术开展深入研究,满足GEO暗弱目标地基高分辨力光学成像探测的需求。