眼科光学相干层析成像的图像处理方法
2019-09-02蔡怀宇张玮茜陈晓冬刘珊珊韩晓艳
蔡怀宇,张玮茜,陈晓冬,刘珊珊,韩晓艳
(天津大学 精密仪器与光电子工程学院 光电信息技术教育部重点实验室,天津 300072)
1 引 言
随着现代医学影像技术的发展,光学相干层析成像(OCT)成为继X射线(X-ray)[1]、计算机层析成像(CT)[2]、核磁共振成像(MRI)[3]、超声成像(Ultrasound)[4]和共聚焦显微镜(Confocal Microscopy)[5]等探测技术后的一个全新生物医学成像技术。OCT具有无接触、无损伤、实时性、超高分辨率等特点。OCT成像技术已克服了研究初期成像深度小、扫描速度慢、分辨率低等设计难题,近年来得到迅速发展,广泛应用于眼科学、脑成像与发育生物学、组织工程学、内窥医学等重要领域[6-10]。
OCT由麻省理工大学Huang等人[11]于1991年首次提出,该OCT系统依据物体后向散射光对离体视网膜的视神经乳头和冠状动脉进行断层扫描成像,分辨率可达1~15 μm。OCT视网膜图像中的病灶精准分层与识别是眼科疾病诊断的重要依据,但OCT图像受散斑噪声影响较大、且图像对比度低,这些缺点为病灶精准检测带来极大的困难。目前已有学者对OCT眼科图像的降噪和定位分层方法做出一定研究[12-17],但高速度、鲁棒性的降噪方法、对眼前节和视网膜层状结构的精确自动分析仍值得深入研究。
本文简述了OCT在眼前节和视网膜诊断中的应用,重点针对近年来国内外OCT眼科图像预处理、视网膜定位分层等处理方法的研究,并对眼科临床诊断指标进行分析,同时对OCT图像处理技术今后的发展趋势和前景做出分析和展望。
2 OCT在眼科诊断中的应用
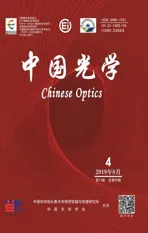
眼科诊断主要包括眼轴长度、眼前节与视网膜3部分诊断。OCT由于具有非接触、瞬时性等特点被广泛应用于眼轴长度和角膜厚度的测量[18],以及黄斑中心凹和玻璃体的检测。早在1994年,Lzatt等人[19]就对正常人眼进行了眼前节OCT检查,分辨率达到10 μm,测量效果如图1(a)所示。眼轴长度的测量对于评估屈光不正等病情具有重要意义。因此,本课题组设计了基于K信号平滑滤波的SS-OCT全眼实时成像系统,通过峰值点标定与多邻域自适应误差筛除方法实现全范围干涉成像,成像深度为60 mm,成像速度达到0.15 s,测量误差为0.01 mm。
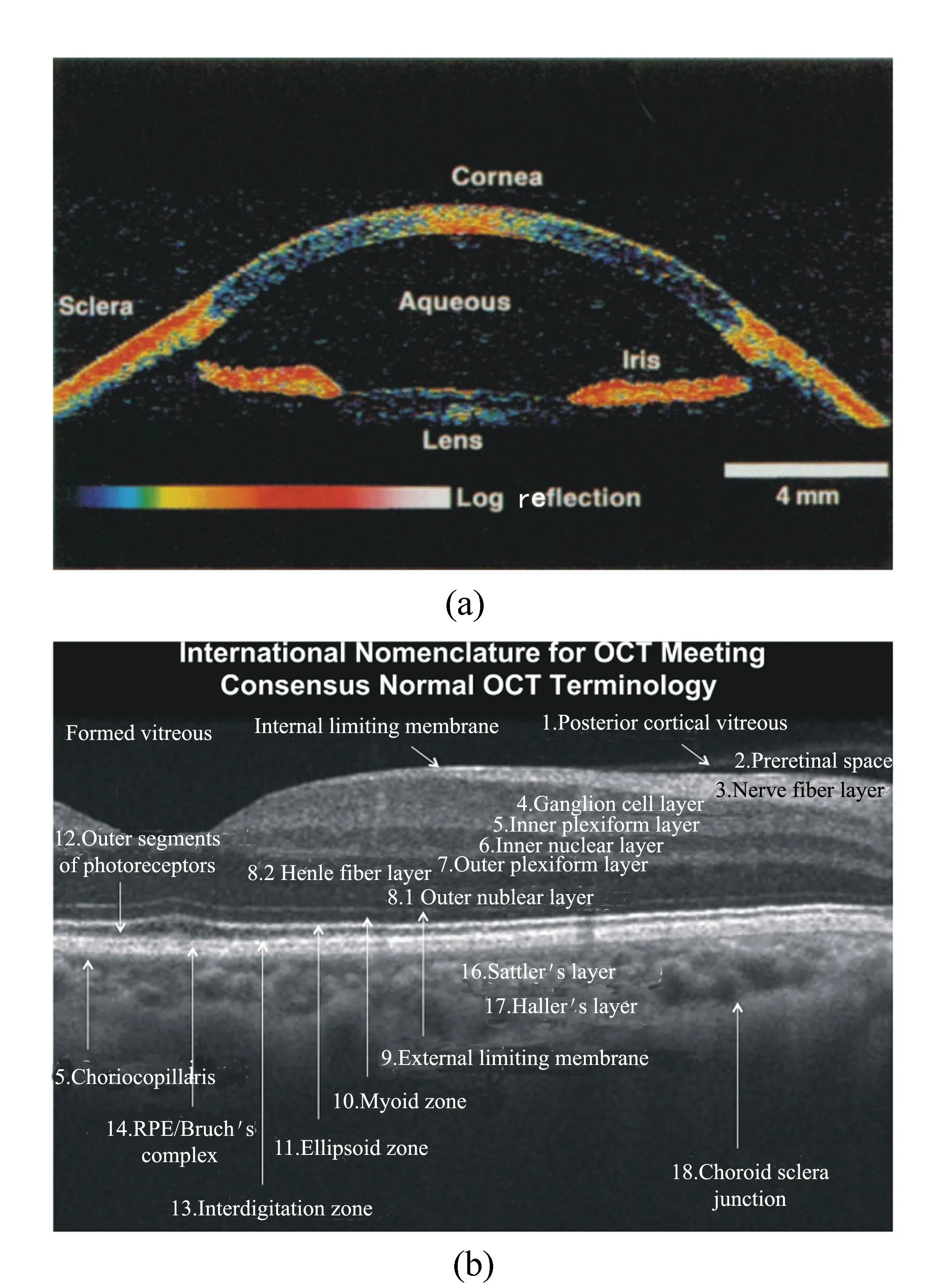
图1 (a) 眼前节OCT图像;(b)视网膜OCT图像 Fig.1 (a)OCT of the anterior segment; (b)retinal OCT image
1995年,OCT成功应用于视网膜成像,实现视网膜的分层,以及黄斑中心凹和视神经纤维层的厚度测量[20-21]。视网膜是具有复杂层状结构的眼底透明组织,其形状近似为曲率半径为12.5 mm的凹球面,在组织学上可把视网膜结构分为18层,如图1(b)所示[22]。
由于黄斑病变、玻璃体视网膜牵引、糖尿病视网膜疾病等眼科疾病患者的视网膜组织结构与正常人视网膜结构有很大不同,因此可通过分析视网膜特定层厚度及形态,例如通过测量视网膜色素上皮细胞(RPE)厚度检测黄斑变性、黄斑水肿等眼科疾病,各类视网膜病变的OCT图像如图2所示[23]。目前常用的眼底相机、裂隙灯等医用设备往往存在精度低、不能定量分析病灶等缺点,因此通过检测各层组织厚度及形态变化程度诊断视网膜疾病,在临床医学上有非常重要的意义。
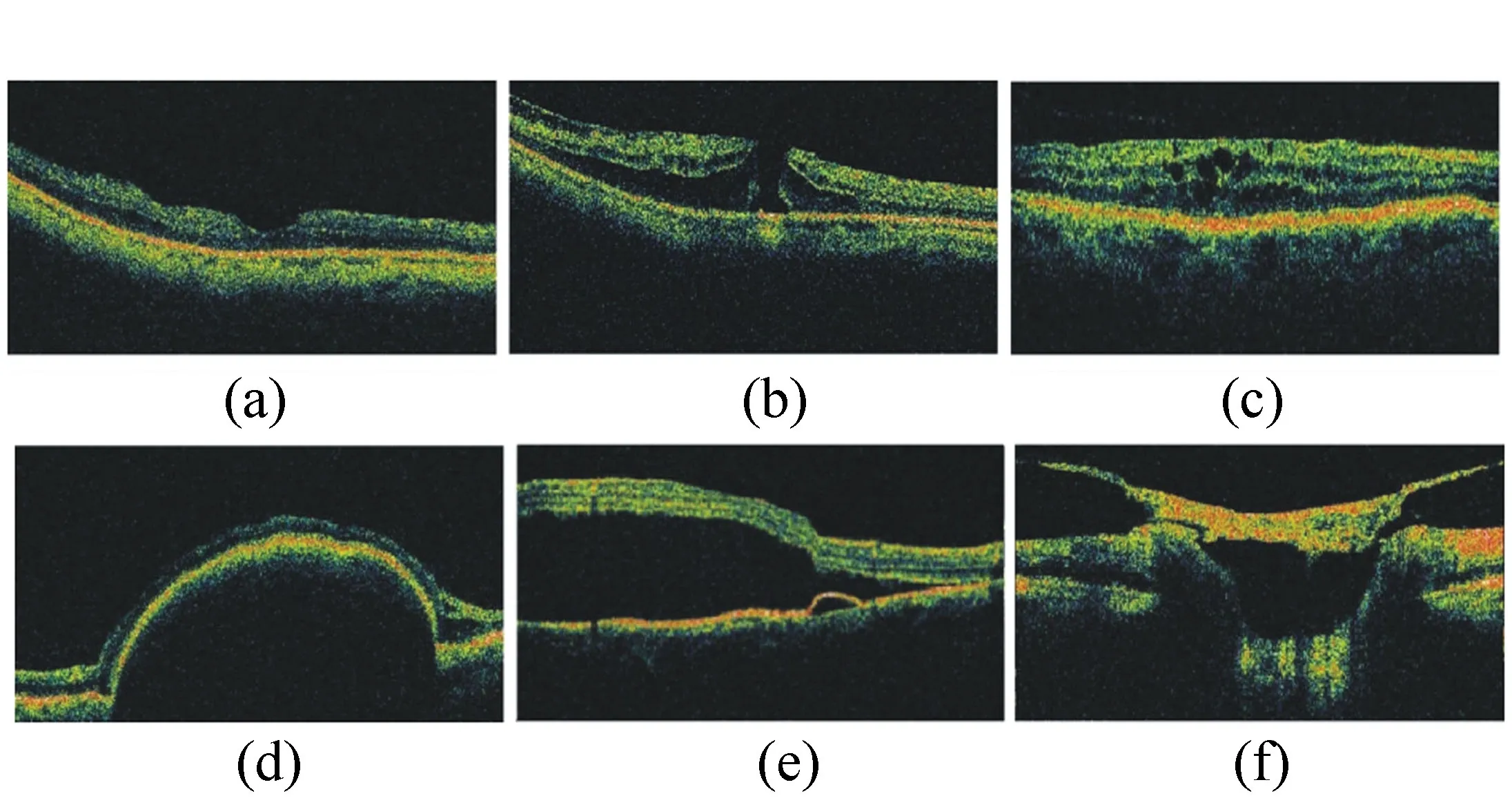
图2 各类视网膜病变的OCT图像 (a) 健康视网膜黄斑中心凹 (b) 黄斑裂洞 (c) 黄斑水肿 (d) 年龄相关黄斑变性 (e) 中央浆液脉络膜视网膜病 (f) 增殖性糖尿病视网膜病变 Fig.2 OCT images of various retinal diseases. (a)healthy macular fovea; (b)macular hole; (c) macular edema; (d)age-related macular degeneration; (e)central serous retinopathy; (f)proliferative diabetic retinopathy
3 OCT眼科图像预处理方法
OCT眼科图像存在对比度低、噪声大、反射信号随成像深度增大而降低等问题,其中低信噪比更是为各层图像的识别带来极大困难。散斑噪声在OCT图像的噪声中占主导地位,由随机相位的散射光波干涉叠加产生,属于乘性噪声。目标物体的光学性质及光源大小、时间相干性和探测器孔径等都会对散斑噪声产生影响[24],散斑噪声的消除可分别在空域和频域中进行。
空域图像处理大多使用均值滤波[25]去除散斑噪声,但由于均值滤波是各向同性扩散,在去噪的同时会使边界模糊,因此各向异性滤波[26-27]、引导滤波[28]和小波滤波[14,29]便成为空域图像处理常用的几种主要降噪方法。
由于各向异性扩散方程对边缘附近噪声的消除有所抑制,因此保边去噪的各向异性扩散方法[12]和结合薛定谔方程的非线性扩散滤波方法[27]被广泛应用于OCT图像散斑噪声去除中,将线性空间尺度拓展到复数域,除消除噪声之外。对图像重要特征的提取也有重要作用。目前最新的方法是Bermardes Rui于2010年提出的自适应非线性扩散滤波方法[29]。该方法在视网膜等高强度区域降低扩散,而在背景区域增强扩散,从而使OCT视网膜图像具有更好的噪声消除和层状结构边缘保持能力。小波滤波方法根据分辨率差异在小波域内转换子图像后,在水平、垂直和对角方向上分别确定非线性阈值系数,从而去除高频的散斑噪声。在传统小波算法的基础上,又出现了具有位移不变性和非正交小波变换的滤波算法[14]、不同死亡地带半径的BiShrink去噪算法[30]、基于DC-CWT的ProbShrink去噪算法[30]等。这些算法具有减少散斑、增加信噪比和提高计算效率的优点,可以去除高频的散斑噪声,但其在边缘锐度保持以及离散噪声点消除方面仍有一定局限性。
在频域中,通常使用零幅度算法(ZAP)[31]和多光谱频率耦合算法[31-33]等方法对散斑进行还原和消除,其中ZAP算法的OCT图像降噪效果如图3所示[31]。在低信噪比区域中,频域降噪操作比空域降噪操作更具有鲁棒性,但只对密度较高的散斑区域有效果,而且容易造成图像边界的模糊。
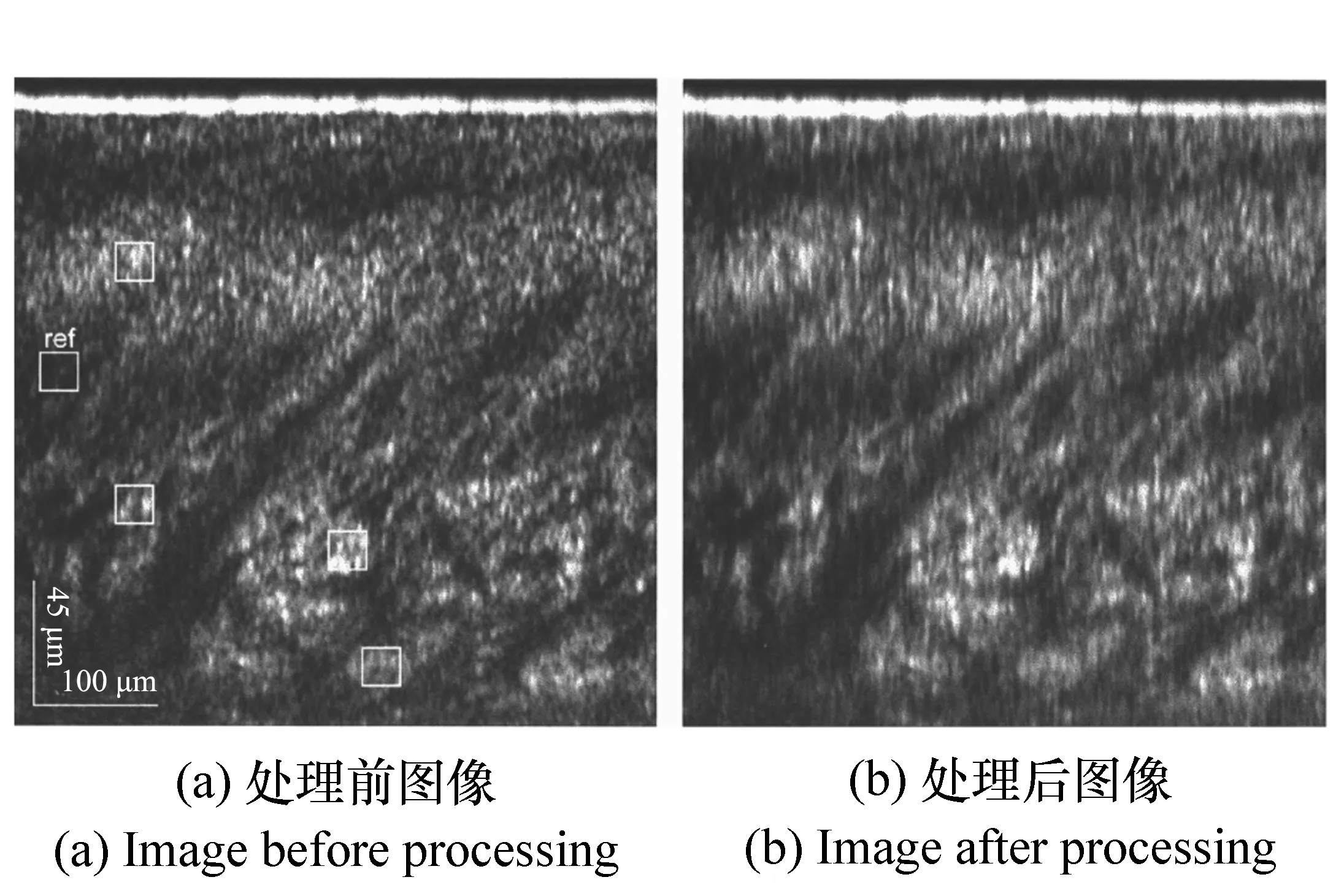
图3 ZAP算法效果图 Fig.3 Image processing with ZAP algorithm
本课题组综合上述方法的优缺点,根据OCT数据结构特征,设计出最大类间方差法和引导滤波相结合的OCT图像增强方法。该方法根据背景噪声在OCT数据中的分布情况,通过最大类间方差法分割背景噪声与角膜,并结合引导滤波的局部线性模型优化分割结果,最终得到边缘清晰的角膜图像,如图4所示。 背景噪声得到了很好的抑制。
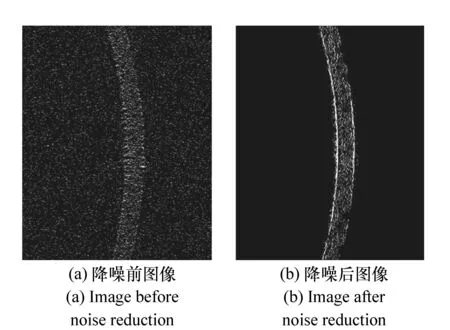
图4 算法效果图 Fig.4 Results obtained with proposed algorithm
4 眼前节图像分析方法
OCT眼前节图像主要包括角膜、前房和虹膜等组织,如图1所示。虽然眼前节各组织结构的折射率和反射率等光学参数差别较大,但角膜图像的低信噪比使得传统图像分层算法难以对其进行准确定位和分层,因此在图像预处理后需要根据图像特点设计眼前节定位及分层算法。
Lin等人[34]对角膜和晶状体作同心圆近似,实现角膜的定位和分层,但由于人眼组织结构具有差异性,故此算法仅适用于健康人眼的眼前节图像分层。Eichel等人[35]采用半自动分层算法提取角膜的上下边界,并使用全局优化方法精确提取角膜的五个边界,具有较强的鲁棒性,但此算法需要人工选择初始点,具有一定的局限性。Larocca等人[36]提出基于图论和动态规划相结合的角膜边界分层算法。此算法在获得角膜边界分层的粗糙结果后,利用水平集函数优化分层结果,克服了OCT角膜图像低信噪比对分层带来的不利影响。该算法具有鲁棒性,目前得到广泛应用。
5 视网膜图像分析方法
在图像处理和临床诊断中通常将视网膜分为9层或10层结构,其中反射率最高的两层分别为视网膜色素上皮细胞(RPE)和内界膜(ILM),即视网膜外边界和内边界。OCT视网膜图像相邻层状结构对比度低,图像中的血管以及其它组织为图像识别和处理造成了困难[37]。目前提出的视网膜分层方法主要围绕灰度值变化法、活动轮廓法、图论法以及模式识别等方向展开研究。
灰度值变化法主要依据图像的灰度值进行区分,通过手动定义阈值或自适应阈值[26]方法对连续采集的多幅图像进行定位分层。koozekannani D等人[38]在2003年首次对视网膜的视神经乳头进行定位,精确度小于5个像素点。Fernández等人[39]在2005年采用非线性扩散滤波与自动/交互式方法进行视网膜定位,摒弃传统的阈值技术,在每条采样线上寻找强度峰值,并采用结构相干矩阵代替原始数据。此方法对受损视网膜的检测依然适用,且对OCT图像的分辨率要求不高。Fabritius[17]在2009年提出基于最大灰度的搜索算法,对ILM和RPE快速分层,降低了灰度变化的敏感程度,可应用于正常眼的分层,通过对ILM层的定位进行脉络膜血管病变(PCV)的诊断,误差在5个像素点内,但在诊断如年龄相关黄斑变性等黄斑疾病方面,RPE层定位的精确度仅为97%,分层结果如图5所示[17]。
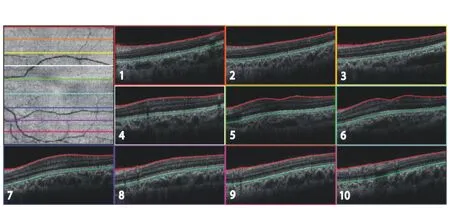
图5 不同例健康视网膜RPE和ILM分层结果 Fig.5 RPE and ILM stratification results of healthy retinal in different cases
早期的分层算法大多基于图像的灰度值变化,需要对多个连续帧求平均后进行分层以保证正确率,但由于检测时人眼抖动,可能造成视网膜定位分层的准确性降低,因此需要对多幅图像进行配准,这无疑增加了图像处理的难度。随着研究的深入,综合图像灰度和梯度等信息的活动轮廓法和图论法等随即出现,基于单幅图像的精确分层方法也逐步被提出。
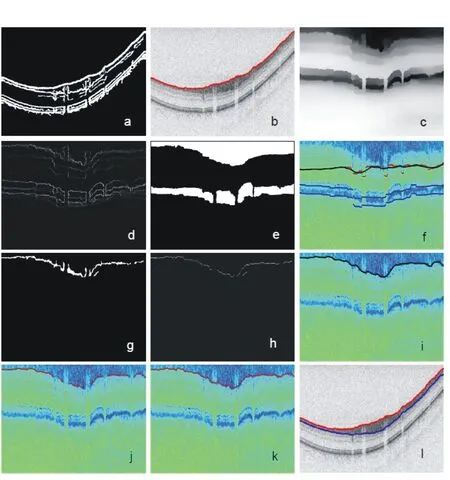
图6 Mujat等提出的基于活动轮廓的视网膜分层方法 Fig.6 Retinal stratification method based on active contour proposed by Mujat
活动轮廓模型于1987年被提出[40],并在2005年开始被广泛应用于光学相干层析视网膜成像的分层。活动轮廓模型是基于边界图像分割的方法之一,其中参数活动模型(Snake模型)对传统活动轮廓模型的捕获范围和稳定性做了改进,是应用最广泛的模型。Snake模型的活动轮廓由曲线参数表示,通过最小化内外能量函数收敛到目标轮廓处,得到光滑连续的轮廓。Mujat等人通过边界的梯度信息确定边界轮廓,如图6所示[41]。该方法减少了灰度变化对分层的影响,是视网膜分割的活动轮廓法中较常用的方法,但仍难以对存在血管等特征的视网膜图像进行准确分层。在此之后,人们逐步提出基于Snakes模型的寻找局部最优解和两步优化等方法[42],但由于Snake模型的分割结果高度依赖曲线的参数选择,且分割范围仅在初始点附近,当目标存在凹陷部分时,函数无法收敛。这是Snake模型无法避免的缺陷。Ghorbel等人[43]提出一种基于主动轮廓和马尔可夫随机域结合的方法,对视网膜的8层结构实现自动分割。自动分割和临床医生手工分割测量指标间的标准差不超过0.14,尤其是视锥、光感受器(IS/OS)和外颗粒层(ONL)分层取得了很明显的效果。
不同于活动轮廓模型寻找到的局部最优解,图论的搜索方法是根据灰度或梯度信息搜寻全局最优解的。近十年来,基于最短路径算法的2D图论算法和3D图论算法[44]相继被提出。2010年,Yang等人[45]提出包含局部梯度和全局梯度的图论搜索算法,以梯度信息和最短路径搜索为基础。该方法利用最短路径搜索的动态规划算法提取边界,避免了局部绝对强度值对分割的影响,实现了视网膜图像精确定位分层,分层效果如图7所示。该算法对每层边界的检测都使用相同的两步分割:首先使用Canny边缘检测器创建局部地图,然后利用轴向梯度的辅助信息确立图论。这样便于使用动态规划算法对图进行最短路径搜索,提取层边界。该算法不需要设定起始点和终止点,增加了分层的灵活性,但对噪声和图像退化等十分敏感。2017年,Duan等人[46]提出改进的基于指数函数加权的测地线距离公式(GDM)。指数函数同时集成了水平和垂直梯度信息,同时也起到增强视网膜边界的作用,最终较好地实现了视网膜9层分层。视网膜厚度测量误差保持在(1.430±0.20) μm内,RPE层的厚度误差仅为(1.82±0.47) μm,对于年龄相关黄斑变性的临床诊断具有重要意义。
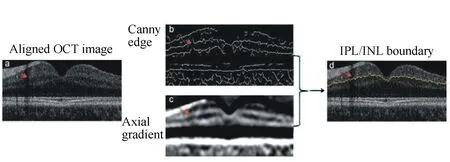
图7 INL层分割互补梯度示意图 Fig.7 A diagram of a complementary gradient for dividing INL boundary
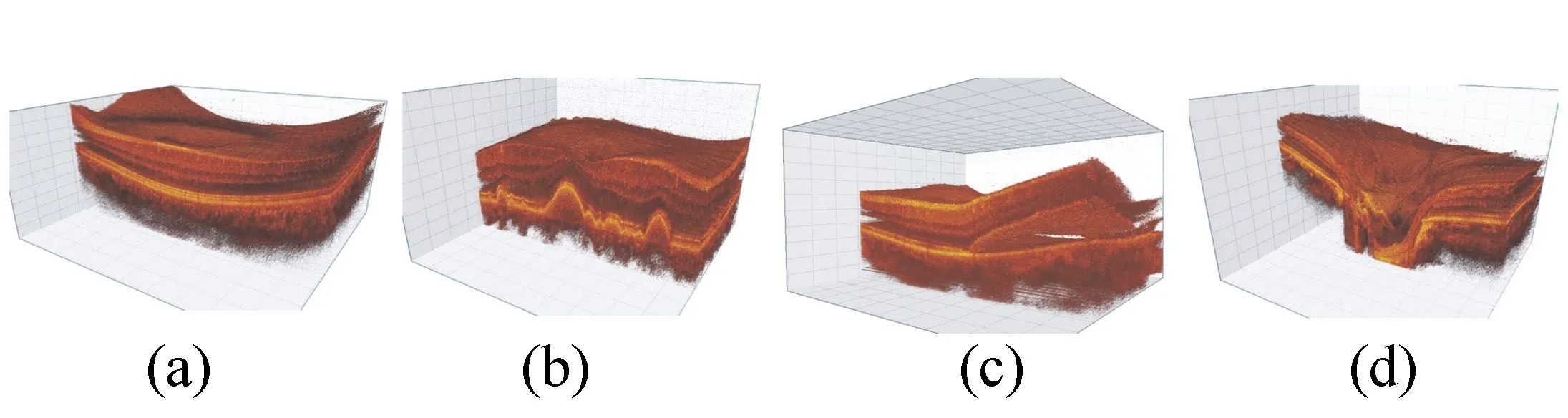
图8 使用SVM对不同病症视网膜OCT成像的分割结果. (a)健康眼; (b)年龄相关黄斑变性; (c)黄斑分离; (d)青光眼 Fig.8 Results of SVM segmentation for retinal OCT imaging of different diseases. (a)Healthy eyes; (b)age-related macular degeneration; (c)macular separation; (d)glaucoma
通过模式识别支持向量机(SVM)对图像进行半自动分割是另一种在临床上用于视网膜分层的方法[46-48],如图8所示[47]。SVM通过建立规则把Rn空间内的样本分成两部分,使两类样本与超平面的距离最大化。通过分离光感受器层(PRL)表征视网膜厚度,可对年龄相关黄斑变性以及视网膜脱落等疾病进行检测。实验表明,SVM分割与临床医生手动分割结果间的误差小于6个像素值。
SVM方法对大多数结构畸形的视网膜图像分层效果很好,但是耗时较长,无法满足OCT视网膜成像的实时性要求。Lang等人[49]使用随机森林分类器(RF)对OCT黄斑三维视网膜图像分层,分辨率达到4.3 μm,RF相比于SVM的优势在于它可以对参数进行小范围调整,从而准确描述样本复杂的非线性关系,并且对于健康以及患病的视网膜图像都适用。
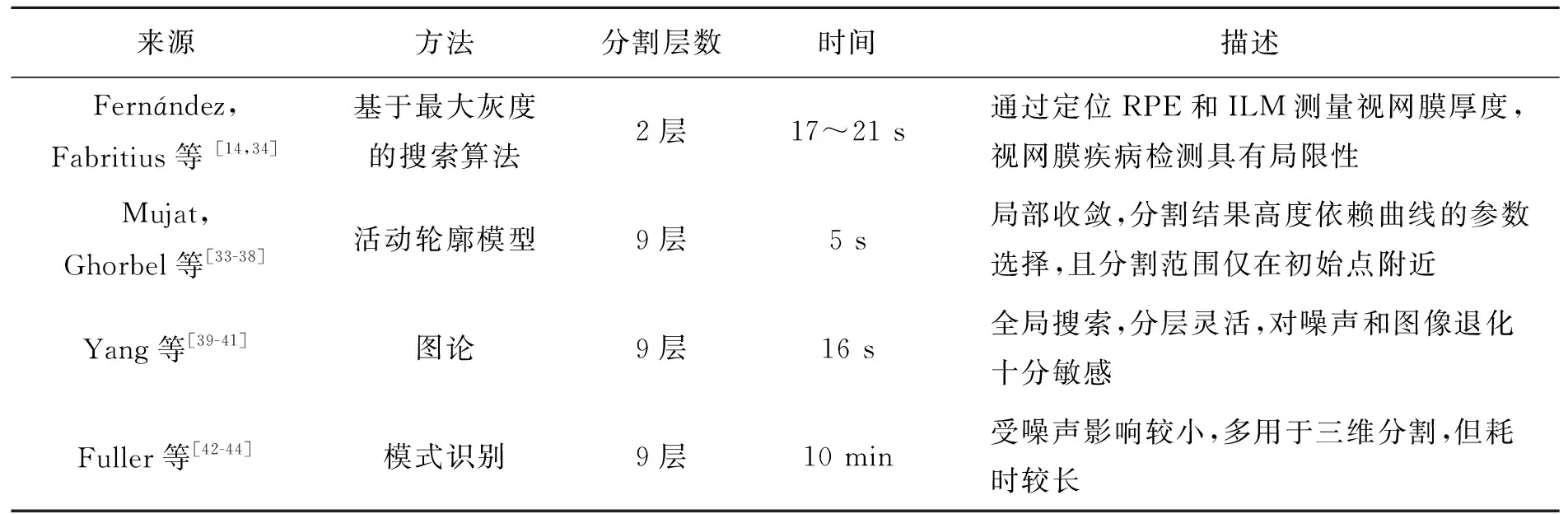
表1 OCT视网膜图像分层方法Tab.1 Methods of OCT retinal image segmentation
表1比较了目前具有代表性的OCT视网膜分层算法在分层结果、实时性等方面的优缺点。活动轮廓法基于局部最优化搜索,分层结果受初始点和初始参数选取的影响较大;图论法受噪声及低对比度的影响较大,模式识别多应用于三维重建,但在实时性等方面仍具有缺陷。大部分方法可将视网膜分为8~9层,这与国际上提出的视网膜图像精确分层标准[22]还有一定距离,分层不精确会导致某些疾病病理信息的丢失。因此探究更高精度的分层方法是亟待解决的问题。
表2列举了几例有代表性的视网膜疾病,以及上述分层方法在OCT临床诊断指标的准确性与优缺点。对于脉络膜视网膜疾病的检测,通常采用基于最大灰度的搜索算法对ILM层进行定位,但由于灰度值搜索方法对RPE等层的检测精度较低,故对黄斑变性等病灶的检测效果较差;活动轮廓法、图论法和模式识别方法都能应用于黄斑变性等病灶的检测。这些方法的鲁棒性明显优于最大灰度值搜索;青光眼的检测一般通过视神经乳头区域杯盘比的测量进行判定,除此之外还可通过NFL层厚度测量判定。杯盘比的测量需要对视神经乳头区域精确分层,而后者的断层图像中包含不连续区域,分层难度较大[50],因此通过模式识别的方法对青光眼进行诊断是目前临床较常用的方法。
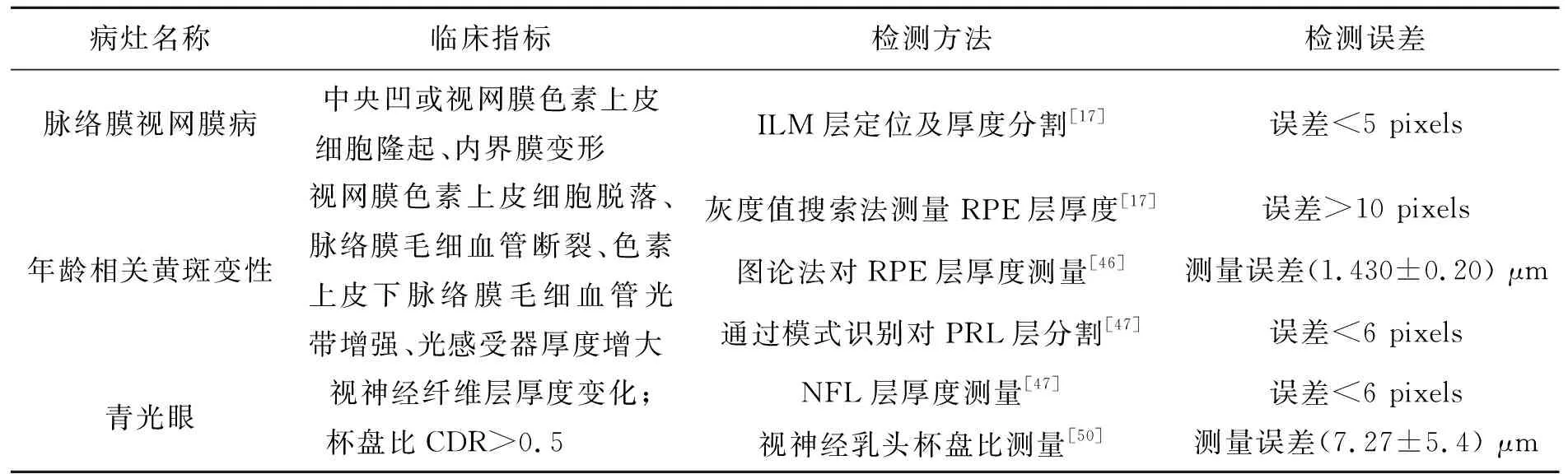
表2 OCT临床诊断指标与算法效果对比Tab.2 Clinical diagnostic index of OCT and comparison of image processing effect with different algorithms
6 结束语
OCT技术凭借高分辨率和实时性等特点在视网膜成像中取得广泛的应用。通过对OCT图像的精确检测可以判断出黄斑水肿和青光眼等视网膜病变信息以及糖尿病、高血压和动脉硬化等全身性疾病信息。随着医疗水平和科技水平的提高,OCT图像处理技术发展迅速。OCT图像预处理算法趋于简单高速,以满足实时成像的需要。OCT图像分析算法由以往单一的黄斑区检测逐步发展为检测视神经盘及全视场视网膜区域,且自动化图像诊断水平不断提升。本文详细分析了各类OCT图像降噪和图像分层方法的优势和缺陷,发现目前基于OCT的眼科诊断和病灶评估大多使用主动轮廓或图论法,但这些方法存在鲁棒性较差的问题,将机器学习与深度学习引入OCT眼科图像处理可以很好地解决传统算法的不足,已经成为新的发展趋势。
探究更精确、更具有实时性和鲁棒性的分层方法,继续进行图像分析算法或开展深度学习的研究、进一步提高OCT成像的图像质量、图像处理精度和扩大检测领域是目前OCT图像处理的主要发展趋势。OCT与超声、共焦显微镜和眼底相机相结合[51-52]可以大大提高成像深度和分辨率,而且多模态融合技术可以为临床诊断提供更加充足的病灶信息,弥补现有方法的缺陷。因此多模态融合技术在眼科疾病诊断领域的运用也将成为全新的研究方向。