小型温室大棚移动底盘设计与仿真研究
2019-09-02刘辉,王川,葛俊
刘 辉, 王 川, 葛 俊
(1.安徽广播电视大学信息与工程学院,安徽 合肥 230022;2.安徽农业科学院农业工程研究所,安徽 合肥 230031; 3.安徽农业大学工学院,安徽 合肥 230036)
近些年,来随着农业科技水平的不断进步,以温室大棚种植为代表的设施农业得到飞速发展,并形成较大的产业规模。目前温室大棚大多采用传统的小型农业机械进行农业作业,设备在使用过程中存在着操作环境恶劣(如灰尘多、农药毒性大等)、舒适性差等问题[1]。另外,像茄果和瓜类等经济作物,它们生长、采摘具有很强的农艺时节性以及大面积种植的特点,致使其田间管理必须有作业效率很高的机械来承担[2]。因此,设计全新的智能化农业机械或是对传统农业机械的智能化改造被逐渐提上日程。
机械移动底盘作为农业智能机械的核心部件,决定了整个系统的机动性和平稳性,同时影响系统能否在特定的空间内顺利完成农业生产。目前农业机械的移动行走方式主要有轮式、履带式、腿足式或其它组合型运动结构[3]。轮式机构的主要特点是结构简单、速度快、效率高、滚动摩擦阻力小,适合在较平坦的地面上行走,主要缺点就是易产生打滑;履带式机构主要特点是地面支撑面积大,接地比压小,滚动摩擦小,性能较好,转弯半径小,牵引附着性能、越野能力强,通过性好,适合于在复杂路面上行驶,主要缺点是结构较复杂;腿足式机构主要特点是有良好的机动性,其运动系统具有良好的主动隔振功能,可以较轻松的通过松软地面和大跨度障碍,适合任何路面的行走,缺点是机构复杂,控制较为困难,目前应用较少,大多处于研究和实验室阶段[4]。通过比较分析,在当前技术水平和农业生产条件下,履带式移动底盘具有其它类型移动底盘无法逾越的优点,比较适合研究与开发。
国外对履带式移动底盘较为著名的有美国Packbot机器人底盘,该机器人底盘采用了双节履带,应用于战场排爆、探测等领域。加拿大ESI公司开发的MR系列机器人采用轮履组合结构,履带装卸方便,可根据地形选择合适的运动机构,在近距离侦察和排除危险品方面有较强的能力。德国TELEROB公司研发的POLYFIMOS机器人,可配备机械爪、X射线系统、金属物质勘测设备、IDE冷却设备等[5]。近年来国内各高校在地面移动机器人研究方面也取得了很大的成果与进展。其中,北京理工大学和哈尔滨工业大学在小型军用移动平台研发成果显著。国防科技大学研发的变形履带底盘,突破了履带底盘空间自由度限制,有效増加了底盘的适应性能[6]。
针对目前温室大棚农业生产机械化程度低,人工作业环境差,结合温室大棚地形特点,本文设计了一种适合于该环境下使用的履带式移动地盘,此移动地盘在保证良好的通过性和稳定性的基础上,为后续搭载机械执行装置,实现农药喷洒、果实采摘、环境检测等做准备。本文详细介绍了该移动底盘的组成结构、工作原理和关键部件的设计等。
1 移动底盘的结构及工作原理
本次设计的履带式温室大棚移动底盘结构如图1所示。主要由导向轮、侧板、平台、驱动轮、液压马达、履带、张紧轮及减振装置等组成。其中,侧板和减振装置为该移动底盘悬架系统的主要组成部分。

注:1.导向轮;2.侧板;3.平台;4.驱动轮;5.马达; 6.履带;7.张紧轮;8.减振装置
由图1可知,移动底盘在行驶过程中,位于履带下方的部分与地面充分接触,驱动轮则通过轮上的轮齿和履带齿之间进行啮合传动。在行驶过程中,马达带动驱动轮转动,驱动轮在驱动转矩的作用下,带动履带不断向后翻卷。此时履带与地面接触部分会给地面一个向后的作用力,根据作用力与反作用力的原理,地面相应地给履带一个向前的反作用力,这个反作用力是推动机器向前行驶的驱动力[7]。当驱动力足以克服行走阻力时,承重轮就在履带上表面向前滚动,从而使机器向前行驶。另外通过控制驱动轮转动的方向可以实现履带行走机构的单独转向,从而实现了最小转弯半径,这一特点在空间狭小的温室大棚得到充分的展示和利用[8]。
2 关键机构设计
2.1 悬架系统设计
保证机器行驶的平顺性是移动底盘设计需要考虑的一个重大要素,因为良好的行驶平顺性能不仅可以提高作业质量,而且可以延长整机使用寿命。在设计过程中,通过对温室大棚地形的实地考察与分析,设计出机器悬架系统的地面仿形结构,这一结构特点在很大程度上保证了移动底盘行驶的平顺性。该移动底盘的悬架系统如图2所示。

注:1.曲柄;2.缓冲弹簧;3.支重轮;4.侧板
系统主要由侧板和多个减振装置组成,而减振装置主要由缓冲弹簧、曲柄和支重轮等组成。两侧侧板上分别装有3套独立的减振装置,以实现对各种不同地面的仿形[9]。
温室大棚里的路面状况较复杂,遇到凸形、凹形以及波纹形等路面情况较为普遍,通过采用上述设计的悬架系统可以使移动底盘在不同路况下平稳运行,其仿形效果如图 3所示[10]。设置移动底盘行驶方向为纵向平面,当移动底盘行驶在凸形、凹形或波纹形路面时,在缓冲弹簧的作用力和整机重力作用下,两侧的 3 个支重轮根据不同地形自行调整,同时带动支重曲柄一端在侧板上的定位滑槽内滑动,使缓冲弹簧受到拉力后伸长并给予曲柄反向拉力,从而使支重轮将履带张紧实现在路面的仿形[11]。另外,当移动底盘遇到横向不平齐的路面时,两侧的悬架系统均可独立地调整支重轮位置,从而实现在横向不平齐路面的仿形[12]。
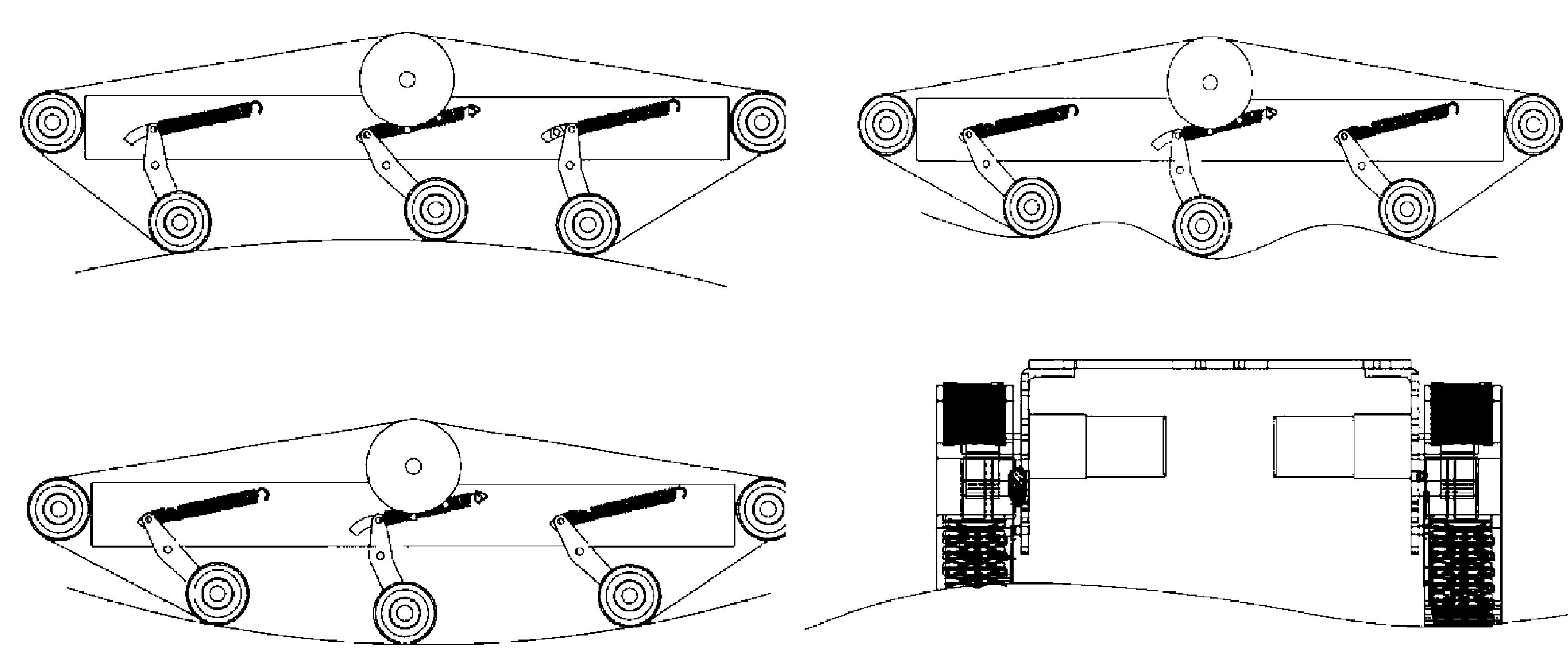
图3 仿形原理示意图
2.2 减振装置设计
减振装置是保证移动底盘在进行行走时平稳的关键部件。设计时为了防止缓冲弹簧减振器阻尼力发生改变,需假设弹簧减振器所受的力以恒定速度加载,弹簧设为理想定刚度以简化模型[13]。单套缓冲弹簧减振器受力简化模型如图 4所示。
已知减振装置中所选用的弹簧自然长度L=150 mm,此长度下弹簧的等效刚度k=16.9 N/mm,摇臂长r=60 mm,支重曲柄长R=240 mm以及曲柄与竖直方向初始角度β=π/6,弹簧与摇臂初始角度为150°,摇臂与支重曲柄间夹角为120°。
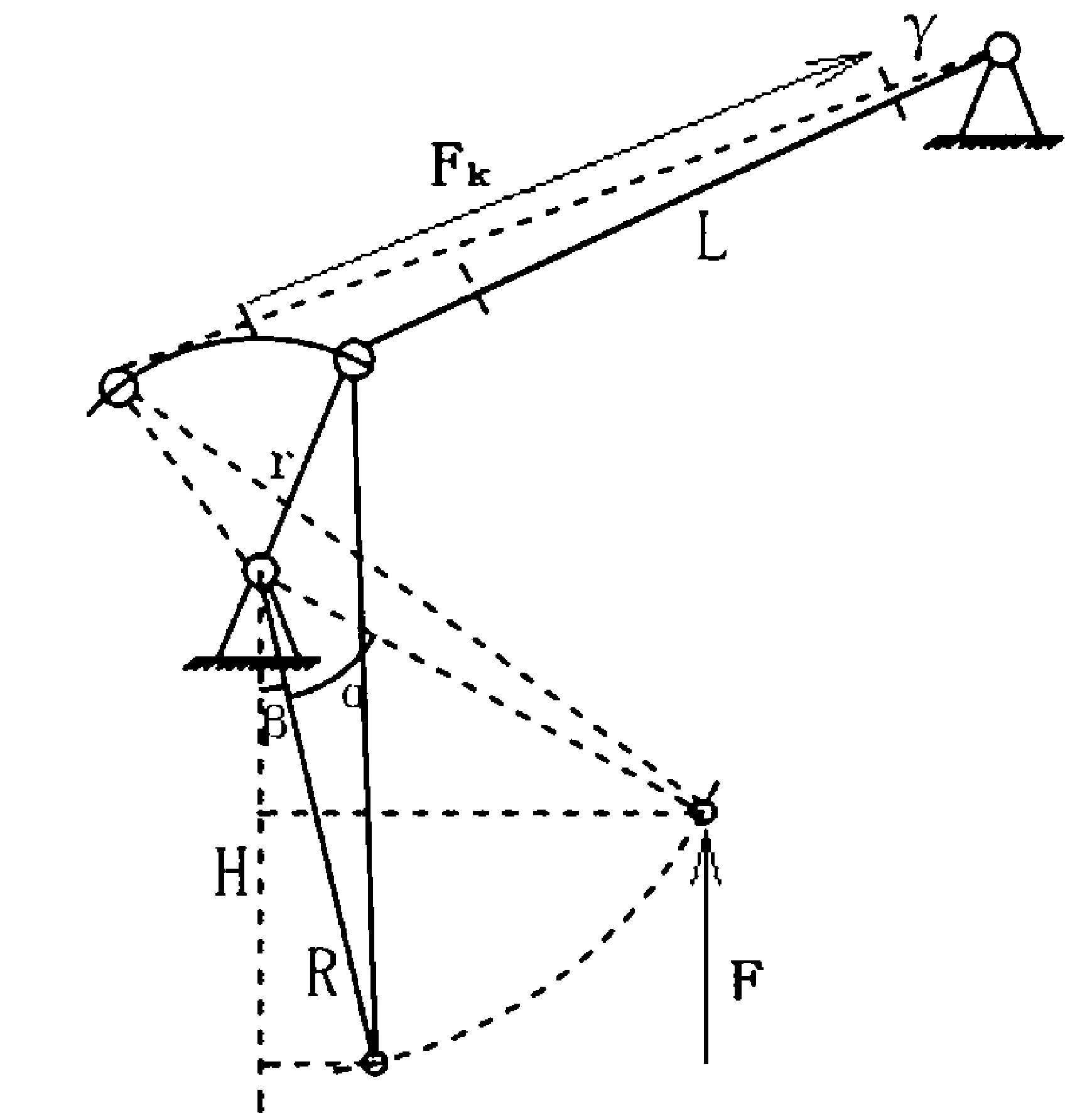
图4 缓冲弹簧减振器受力示意图
当支重轮受到地面F作用力时,曲柄和摇臂绕支点逆时针旋转α角,使弹簧受力拉伸同时逆时针转动γ角,此时摇臂受到弹簧的拉力FK。根据受力情况得到力的平衡方程如下:
(1)
式中:Fy为减振器预紧力和阻尼力之和,Fy=k'α。
根据图中几何关系可得:
Fk=klsin(α-γ)
(2)
将式(2)代入式(1)中,得
(3)
根据几何关系,得到曲柄垂直移动距离为
H(α)=R(cosβ-cos(α+β))
(4)
由于γ较小,在此为方便计算,忽略γ的值,将式(3)、(4)整理后得到整机在竖直方向上等效刚度:
(5)
由式(5)可得到
(6)
根据数学模型,可绘制Keq-H特性曲线(图5)。
从建模求解的结果可以看出,该移动底盘的结构可以实现在竖直方向上的非线性变刚度特性。通过对限位弧形滑槽的位置、弧长进行设计,能够保证减振器在合理范围内工作,同时避免其遭受过大运动冲击。
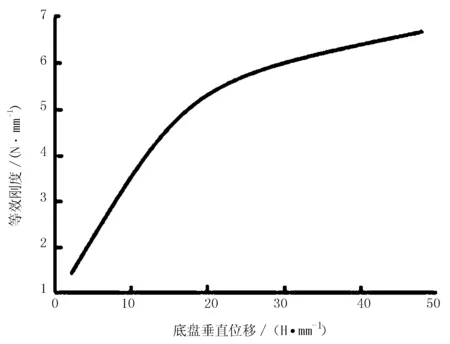
图5 刚度位移特性曲线
3 ADAMS仿真分析结果与讨论
由于温室大棚作业环境较为复杂,移动作业车在运行时会遇到多种不同的工作路面,因此对温室大棚移动底盘进行工况仿真分析尤为重要,本次设计采用ADAMS ATV对温室大棚移动底盘在凹形路面、凸形路面和波形路面3种不同工作路面的行使性能进行动力学仿真,并将结果进一步做对比分析[14]。
通过PRO/E软件建立温室大棚移动底盘的三维模型,然后将建立好的三维模型经过格式转换导入ADAMS软件中,进行仿真处理,其仿真模型如图6所示[15]。仿真时,根据普通农业机械在温室行驶速度,设定移动底盘模型的初始速度为0.9 m/s,驱动速度为0.65 m/s。
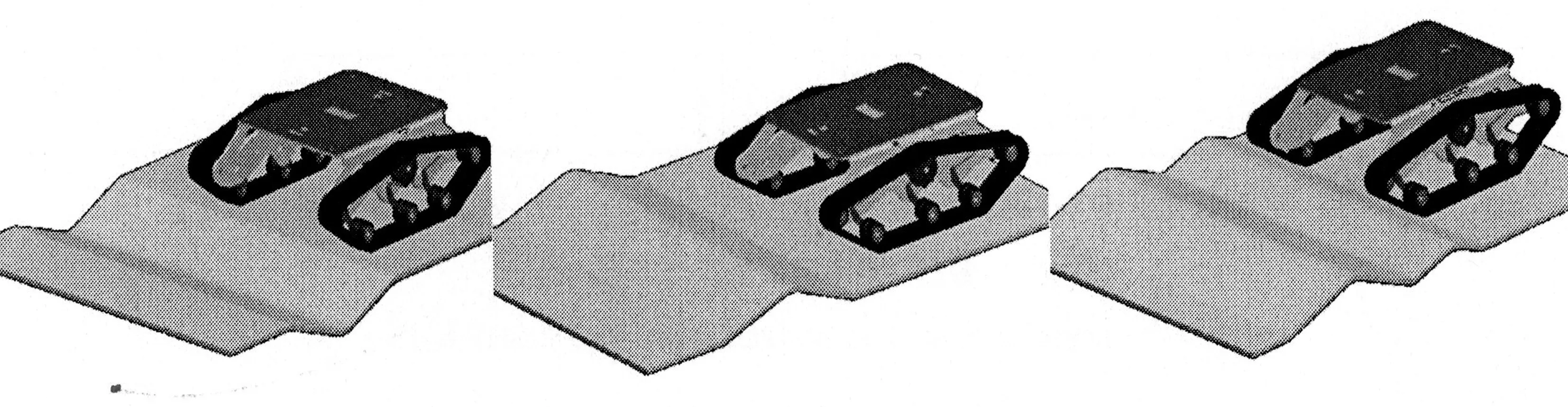
图6 不同路面移动底盘的动力学仿真
3.1 凹形路面状况下仿真分析结果与讨论
根据温室大棚作业情况,建立带有深20 mm、宽30 mm浅沟的凹形工作路面模型(图6-a)。
由图7-a移动底盘车体质心X向位移曲线可知,移动底盘能够轻松越过浅沟。由图7-b车体Z向位移曲线能够发现,车体过沟时质心的波动较小,其范围在6 mm之内。从图7-c速度曲线能够发现,在越过浅沟过程中虽较为轻松,但车体速度变化较大。这是因为在过沟时履带前端逐渐向外伸出,当伸出量达到一定长度时,会在车体重力作用下发生下降并伴随速度上升。随着履带前端与沟的另一端接触,车体与地面出现角度导致接地面积减少,故履带出现打滑现象。最后当履带前端顺利爬上沟的另一端时,车体恢复平衡,速度慢慢上升到驱动速度。
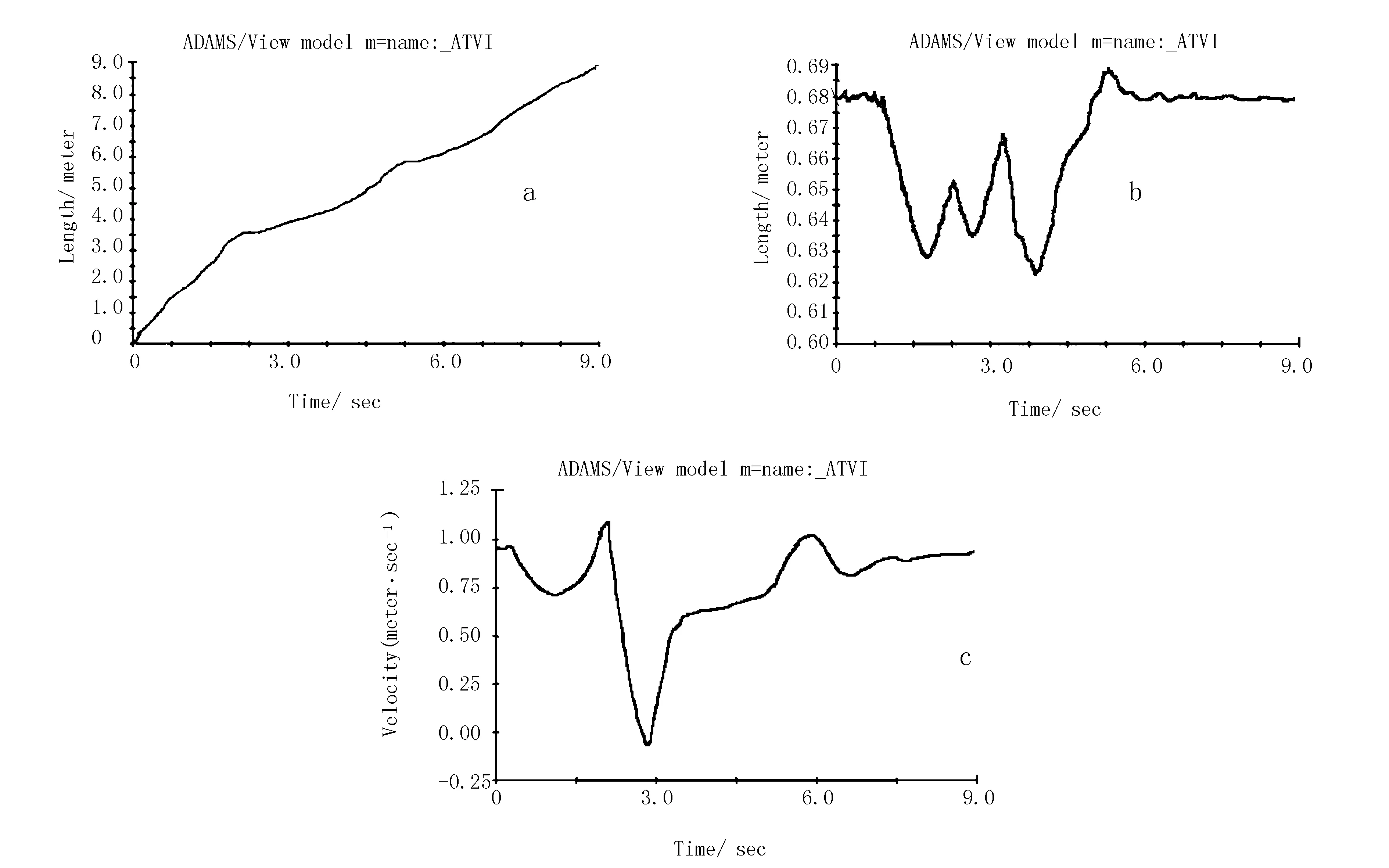
注:a.车体质心X向位移曲线;b.车体质心Z向位移曲线;c.车体质心X向速度曲线
3.2 凸形路面状况下仿真分析结果与讨论
温室大棚作业环境较复杂,在路面上经常出现凸起的土垄。当机械越过凸起的土垄通常是会产生波动,波动较大时更会出现翻车现象。基于温室大棚中土垄的常见高度约20 mm左右,建立带有20 mm障碍的凸形工作路面模型(图6-b)。
利用ADAMS进行仿真分析,结果凸形路面车体质心曲线如图8所示。可以看出履带式移动底盘的驱动速度为0.65 m/s时,在整个过程中前进速度的变化比较大,但仍能够顺利通过凸形路面,在通过障碍的过程中车体质心较为稳定,车体不会产生大幅度的波动。
注:a.车体质心Z向位移曲线;b.车体质心X向速度曲线
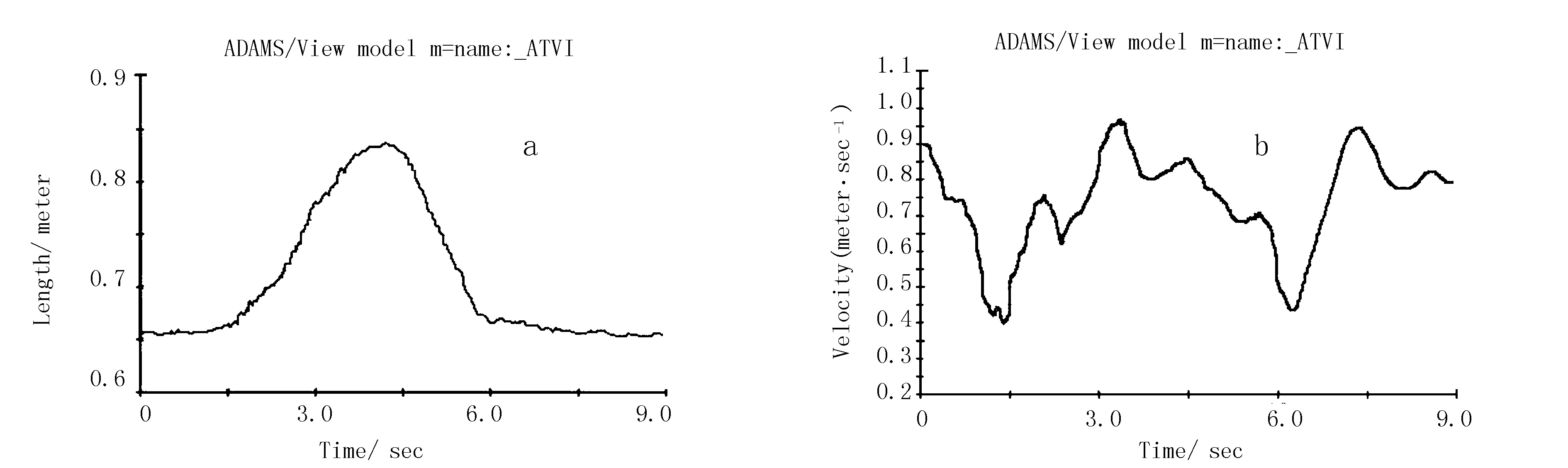
3.3 波形路面状况下仿真分析结果与讨论
根据温室大棚作业情况,建立凹凸不平的波形路面模型(图6-c)。
通过ADAMS模拟仿真结果如图9所示。从图中可以看出,移动底盘在整个运行过程中,车体质心X向位移波动最大值在14 cm左右,波动较小,车体质心较为稳定,前进速度的变化比较大,但仍能够顺利通过波形路面。

注:a.车体质心X向位移曲线;b.车体质心X向速度曲线
4 结论
本文对移动底盘的性能特点进行了分析研究,设计了一种应用于温室大棚作业的移动底盘,对移动底盘装置进行了原理分析和参数设定,确定了主要设计参数,经过数学建模和软件仿真,得出在温室大棚中使用移动底盘进行农业作业,能够保证良好的通过性、行驶的平顺性和较好的减振性能,为下一步在移动底盘的基础上搭载操作机械手奠定基础。
