基于气动肌腱混合驱动上肢康复装置的开发与研制
2019-08-31高大地邹任玲王麒铭
高大地,邹任玲,王麒铭
上海理工大学医疗器械与食品学院,上海200093
前言
脑卒中俗称中风,是一种脑组织损伤疾病[1-2]。美国心脏协会研究记录表明,美国每年有795 000人患脑卒中[3]。根据流行病学调查结果推算,我国每年发病人数多达150万人左右,每年脑卒中的发病率为217/10万人[4]。由脑卒中引起的致瘫率高达86.5%,脑卒中导致肢体功能障碍已经成为目前最首要的致残原因[5-6],而上肢康复训练是肢体功能障碍患者康复的关键技术[7]。
上肢康复训练装置在20世纪90年代以来得以推广应用[8]。1998年,麻省理工大学研制了一款名为MITMANUS的末端牵引上肢康复机器人[9-10],实现机器人牵引使用者手部完成肩关节、肘关节和腕部在水平或垂直方向的单一平面运动。2009年,瑞士苏黎世大学开发了ARMin上肢外骨骼康复训练机器人系统[10-12],进一步增加上肢康复装置功能,增加了前臂内旋和手腕弯曲/伸展运动。2010年,加利福尼亚大学设计了4自由度上肢康复外骨骼[13],该装置第一次采用了气动驱动装置来实现肩部、肘部的康复训练。上肢康复装置在国内也有发展,2009年,哈尔滨工业大学开发了一种5自由度的上肢康复机器人[14-15],使用者可以利用装置进行主动训练。2012年,华中科技大学研发了基于气动肌腱的两个自由度康复机器人系统[16-17],将气动肌腱应用于上肢康复领域。
目前的上肢产品分为两类,一类采用纯电机驱动,纯电机驱动会导致外骨骼重量重且笨拙,柔顺性差以及功率/重量比低;另一类采用气动肌肉驱动,以华中科技大学研发两个自由度康复机器人系统为代表,训练响应速度慢,精度低且不易实现外骨骼三维空间范围内的运动。本文研究设计一款以气动肌腱驱动为主,电机驱动为辅的混合型多自由度上肢外骨骼康复训练装置,肩关节内收外展运动设计采用电机驱动方式,满足大范围活动;肩关节屈伸运动、肘关节屈伸运动和腕关节旋转运动采用气动肌腱驱动方式,既满足了以安全性和柔顺性为中心减少患者患肢二次伤害的设计理念,又兼顾到肩关节得到高效率康复治疗的要求。
1 上肢康复装置运动学分析
本文设计的上肢康复装置采用开链式关节型结构,可辅助使用者实现肩关节的内收外展运动和屈伸运动、肘关节屈伸运动、腕关节旋转运动,可以各个关节单独运动,也可以多关节运动以实现装置末端轨迹为“8”字的动作[18]。根据国民体质监测公报以及人因工程学,该装置大臂、小臂均可调节,范围分别为230~270 mm和300~330 mm。肩关节内收外展、肩关节屈伸、肘关节屈伸和腕关节旋转的角度范围分别为-90°~30°、45°~135°、0°~90°、0°~45°。
对设计的上肢康复装置进行正运动学分析,得出各关节运动角度和装置末端在空间坐标中位置的关系是设计有效的康复训练模式的理论基础。在空间坐标系中,笔者设计的上肢康复装置自由度为4且每个关节都是旋转副,所以可以将装置简化成空间4连杆机构进行分析。根据D-H坐标系建立法则,在符合人体上肢实际运动参数的前提下,建立上肢康复装置的运动学模型,建立的坐标系如图1所示。根据此坐标系,按照D-H矩阵参数的定义,得到D-H参数表,如表1所示。
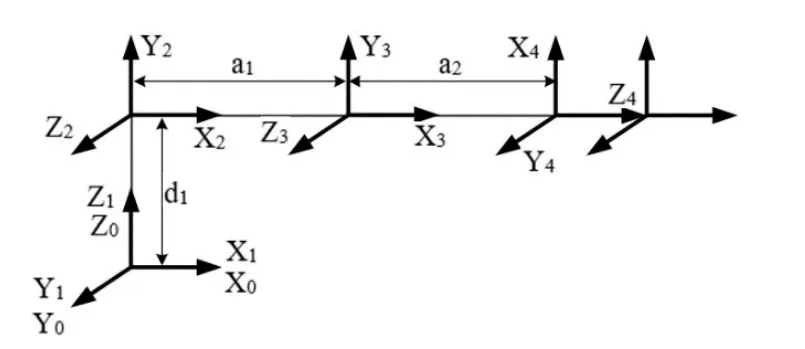
图1 上肢康复装置D-H矩阵坐标系Fig.1 D-H matrix coordinate system of upper limb rehabilitation device

表1 上肢康复装置D-H参数表Tab.1 D-H parameters of upper limb rehabilitation device
坐标之间的变换关系由平移变换和旋转变换组成,任意相邻参考坐标系可以用齐次变换矩阵描述,如式(1)所示:

其中,n T n+1、An+1表示坐标系n到坐标系n+1的变换关系;rot(z,θn+1)、rot(x,αn+1)表示坐标系间Z轴和X轴的旋转变换。trans(0,0,dn+1)、trans(an+1,0,0)表示坐标系间Z轴和X轴的平移变换。
将表1中的参数分别带入式(1)中,得到相邻坐标系之间的齐次变换矩阵,通过坐标变换原理式(2):

其中,0T4表示坐标系0到坐标系4的变换关系。
可以得到装置末端在空间坐标系中总的齐次变换矩阵,此齐次变换矩阵如式(3)所示:

其 中 ,si=sinθi,ci=cosθi,sij=sin(θi+θj),cij=cos(θi+θj)。
上肢康复装置在空间位置和姿态可用此矩阵描述出来,从而建立装置末端位置运动学方程如式(4)、(5)、(6)所示:


取肩关节内收外展,肩关节屈伸,肘关节屈伸角度值分别为:
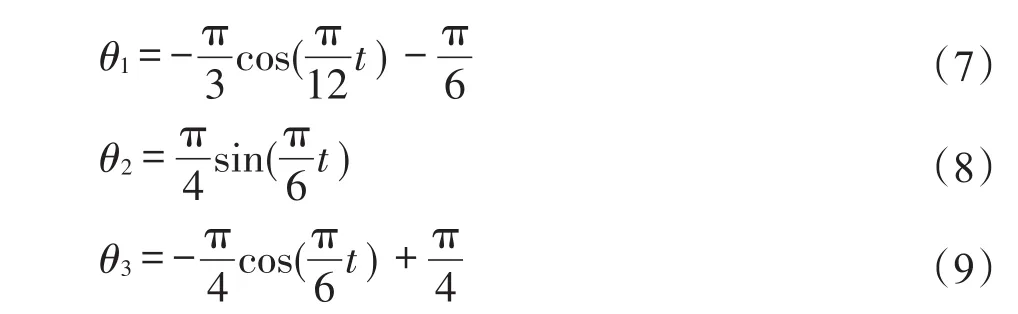
将式(7)、(8)、(9)代入式(4)、(5)、(6),运用Matlab可以求得装置末端在基坐标轴上相对与时间的轨迹及装置末端在基坐标轴的轨迹如图2所示。
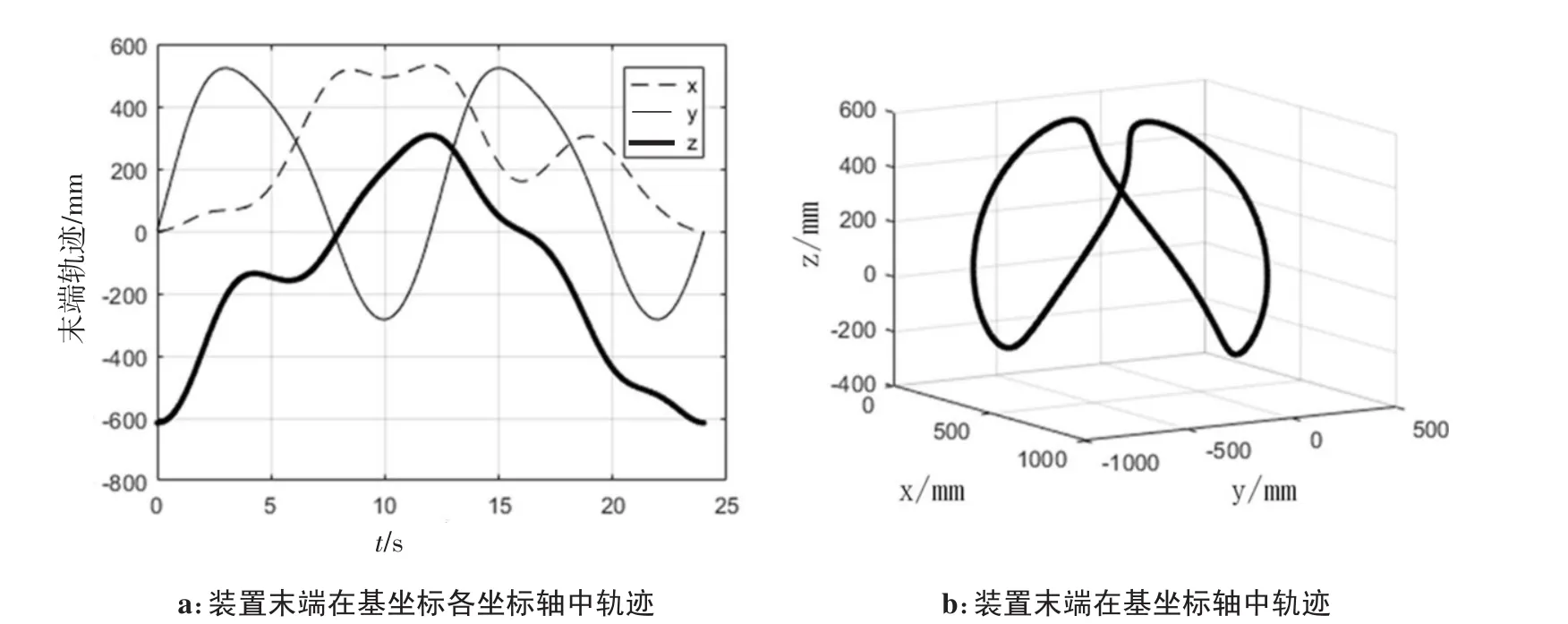
图2 运动学模型末端轨迹Fig.2 Trajectory of the end of the kinematic m odel
为了检验运动学模型的正确性,在机械系统动力学自动分析系统(Automatic Dynam ic Analysis of Mechanical Systems,ADAMS)中导入三维模型,对各个关节输入位置信号,得到装置末端在基坐标轴上相对于时间的轨迹及末端在基坐标轴的轨迹和Matlab求得的轨迹完全相同,从而证明运动学正解的正确性。
2 上肢康复装置动力学分析
在控制设计中,为满足设计上肢康复装置末端做轨迹为“8”字轨迹运动,需要得到运动轨迹的各个关节角度随时间变化的表达式。各个关节角度使用MPU6050传感器和STM 32F103C8T6芯片进行采集。选取10名正常试验者在规定时间内完成肩关节内收外展,肩关节屈伸和肘关节屈伸得到角度变化的数据(得到肩关节内收外展角度θ1、肩关节屈伸角度θ2及肘关节屈伸角度θ3对应的值,利用Matlab中曲线拟合,得到拟合出的方程表达式为:


将式(10)、(11)和式(12)中的θ1、θ2、θ3代入式(4)、(5)、(6)可以得到装置末端在空间坐标系中的轨迹是“8”字型,证明拟合的方程式式(10)、(11)和(12)是正确的。
2.1 肩关节内收外展运动转矩
在整个上肢康复训练过程中,使用者上肢和上肢外骨骼重量均由结构下方平面承担,肩关节内收外展驱动电机仅需要提供肩关节旋转转矩即可。因此,可将其简化成直线杆绕轴转动的模型,如图3所示。在图3中:
得到肩关节做内收外展运动时所需要的转矩如式(17)所示:
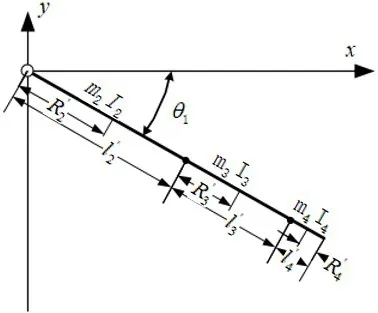
图3 肩关节内收/外展运动简化模型Fig.3 Sim plified model of the adduction/abduction of shoulder joints

2.2 肩关节屈伸和肘关节屈伸转矩
通过对人体运动学的研究,可以发现在上肢运动过程中,主要是肩关节和肘关节受到力矩作用。对上肢外骨骼康复训练装置的肩关节和肘关节进行动力学分析,简化后的外骨骼模型如图4所示。

图4 肩关节和肘关节屈伸简化模型Fig.4 Simp lified m odel of the flexion and extension of shou lder joints and elbow joints

其中,Ek为系统的动能,Ep为系统的势能,θ为关节角,τ为关节驱动力矩。
上肢康复装置动力学建模是实现装置有效控制的基础。动力学建模有很多种方式,本设计采用拉格朗日法建立动力学模型[19],其中拉格朗日函数的定义如式(18)所示:

则系统的动力学方程为:
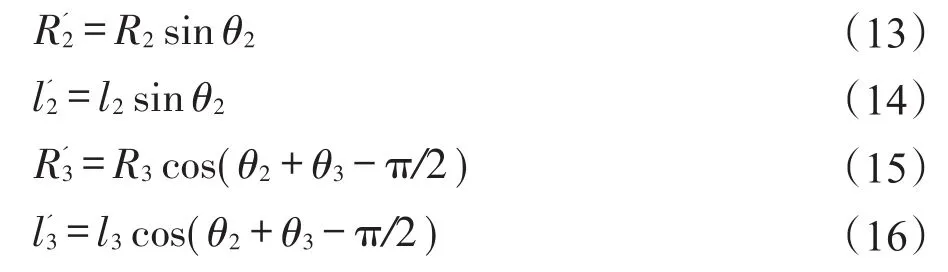
结合图4,可以求出大臂、小臂和手部的动能分别为Ek2、Ek3和E k4如式(20)所示:
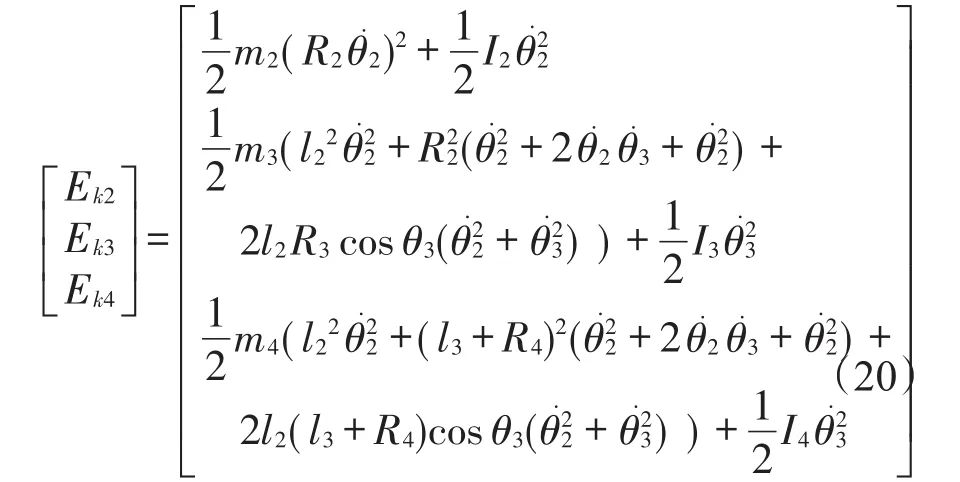
其中,m2、m3和m4分别为大臂、小臂和手部外骨骼的总重量,l2、l3和l4分别为外骨骼大臂、小臂和手部对应的长度。R2、R3和R4分别为l2、l3和l4对应长度的一半。I2、I3和I4分别为大臂、小臂和手部相对质心的转动惯量。
势能为Ep2、Ep3和E p4如式(21)所示:
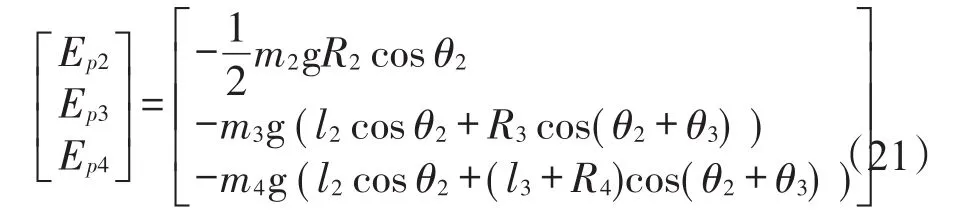
其中,g表示重力加速度。
故,Lagrange函数L可表示为:

可以得到肩关节转矩τ2:
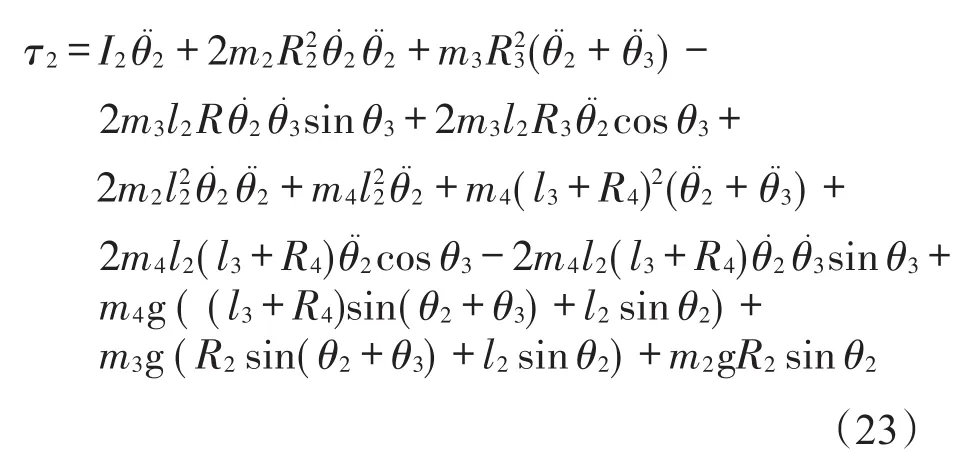
肘关节转矩τ3:

式(7)中的θ2、θ3取值带到公式(16)、(17)中,用Matlab求解出完成肩关节屈伸和肘关节屈伸运动所需要转矩曲线,在ADAMS中导入三维模型进行动力学分析得到两关节转动所需扭矩曲线,两种方法得到曲线对比如图5所示。从图上可知,ADAMS仿真结果与数学模型计算结果基本一致,说明了动力学模型的正确性。
3 上肢康复装置控制系统原理及模型建立

图5 肩关节和肘关节屈伸动力学模型Fig.5 Dynam ic m odels of the flexion and extension of shoulder joints and elbow joints
基于气动肌腱混合驱动上肢康复装置能否按照设计的轨迹辅助使用者完成康复训练,需要设计合理的控制系统。为了验证控制系统是否满足设计要求,需要对装置各个关节运动进行数学模型建立并进行Matlab/Simulink仿真。
3.1 上肢康复装置控制系统原理
基于气动肌腱混合驱动上肢康复装置的控制系统原理图如6所示。在上肢康复装置位置控制中,分别对肩关节屈伸和肘关节屈伸驱动气动肌腱给定初始气压P1、P2、P3、P4。给定期望位置θd1、θd2、θd3,通过控制PID算法确定控制输出量为u1、u2、u3。在肩关节内收外展运动中,通过输出量u1确定需要输出的PWM脉冲频率,从而驱动电机跟随预定曲线运动。在肩关节屈伸运动和肘关节屈伸运动中,通过输出量u2、u3确定每根气动肌腱需要气压P,通过D/A转换为各个关节电磁比例阀控制电压,通过控制比例阀实现对各个关节气动肌腱的充气和放气,驱动关节运动。在各个关节上安装角度传感器实时采集关节角度电压值,通过A/D转换为关节实时角度值θ1、θ2、θ3,与期望角度比较,形成关节位置的闭环控制。
3.2 上肢康复装置控制系统建模与仿真
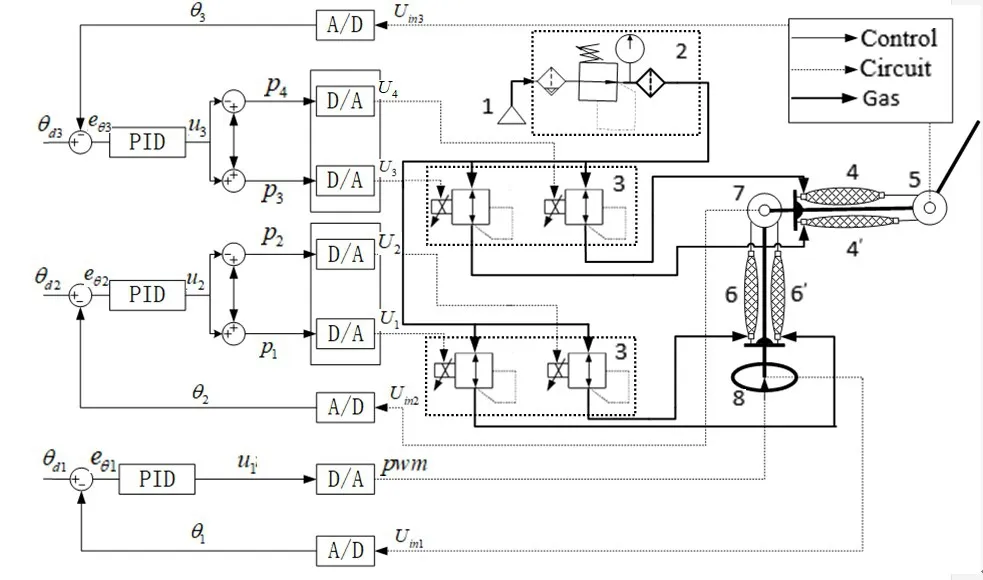
图6 基于气动肌腱混合驱动上肢康复装置的控制系统原理图Fig.6 Schematic diagram of the control system of upper limb rehabilitation device based on pneumatic tendon hybrid drive
本文设计的上肢康复装置肩关节和肘关节屈伸均由气动肌腱驱动完成预定运动轨迹。在装置上装有固定支架和定滑轮,定滑轮的轴心和关节转动中心相重合。使用钢丝绳将一对气动肌腱与关节处的定滑轮相连接,在两个气动肌腱的牵引下随滑轮同步转动带动大臂和小臂运动[20]。关节运动采用位置和刚度联合控制法[21],其中关节期望位置为θd,关节期望刚度为固定值Kd=10。
根据虚功原理所建立的Chou模型[22],计算关节处由气动肌腱产生的驱动扭矩为:

其中,D0是气动肌腱的初始直径,p为气动肌腱的内部气压,ε为气动肌腱收缩率,β1、β2是与气动肌腱编织角α0有关的参数
根据关节刚度是关节驱动扭矩对关节转角导数的定义[23],得到关节刚度Kd与扭矩τ、转动角度之间的关系式如(26)所示:

其中Li(i=1,2)分别为两根气动肌腱气囊的实际长度,Li与关节转动角度θd的几何关系式为:D0±θd∙r ,r为关节定滑轮的转动轮盘半径。
每根气动肌腱的理论充气气压由单独的电磁阀控制,根据关节的角度位置θd和刚度Kd可以建立气动肌腱的充气气压P1、P2与关节转动角度θd数学模型,从而实现通过控制比例阀通过气体量对关节转动角度的精确控制,从而精确控制上肢康复装置完成肩关节屈伸和肘关节屈伸运动。
肩关节内收外展运动由电机控制,本设计中的肩关节内收外展的电机选择步进电机。根据上文肩关节内收外展所需扭矩公式(10),可以得到扭矩最大为0.212 1 N·m。根据上文中各个关节的转动角度和时间的关系式(9),得电机最大转速为50.0 rad/s。因此选择型号为57步进电机57BYG250B,其最大扭矩为1.2 N∙m,满足肩关节内收外展所需要扭矩,电机驱动器选择57步进电机驱动器M 542-05,选择微步细分为5 000步数/转。肩关节内收外展角速度和PWM频率关系为:

在Matlab/Simulink环境下进行系统仿真实验。得到各个关节运动过程中期望角度值和仿真角度值误差曲线如图7所示。
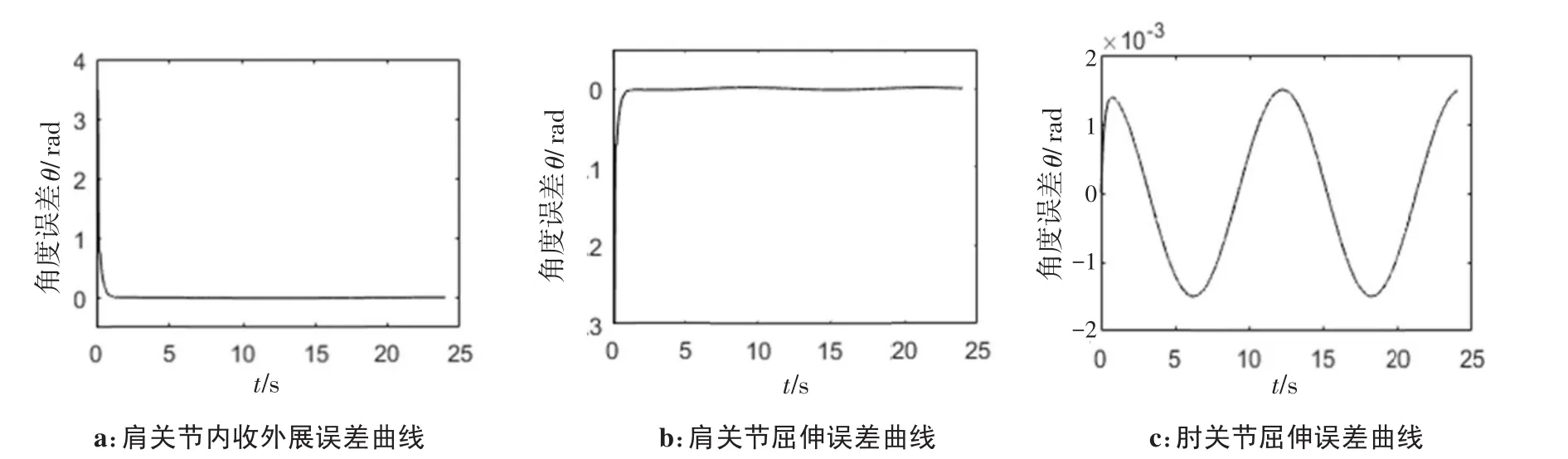
图7 关节角度误差曲线Fig.7 Joint angle error curve
通过仿真实验得出装置关节运动期望角度值和仿真角度值误差小,证明所设计的上肢康复训练装置控制系统满足设计要求。
4 结果与结论
本文设计的基于气动肌腱混合驱动的上肢康复装置是可辅助脑卒中患者进行上肢康复训练的外骨骼训练装置,该装置采用气动肌腱驱动为主,电机驱动为辅的驱动方式,具有锻炼范围广和安全性高的特点。本文通过正运动学求解得到了装置末端的位置方程,使用Lagrange法建立了人-机系统的动力学方程,在ADAMS中建立了人-机系统的仿真模型进行仿真,验证了运动学正解和动力学模型的准确性。之后,设计合理的上肢康复装置控制系统,对装置各个关节运动进行数学模型建立并通过Matlab/Simulink仿真验证了控制系统的合理性。该研究结果对基于气动肌腱混合驱动的上肢康复装置控制系统的控制软件设计有参考意义,并对设计上肢训练的康复器械具有指导意义。